Clear Sky Science · zh
一种面向车辆边缘云计算中容错任务卸载的双层移动感知深度强化学习方法
为数据饥渴的汽车打造更灵敏的道路
现代汽车正变成移动的计算平台,不断处理摄像头画面、传感器数据和导航信息。为了确保驾驶安全和服务响应,这些处理必须在毫秒级完成。本文探讨如何通过协调车辆的“数字任务”在哪里执行——在车内、路边的小型计算单元,还是远端云服务器——来提升实时计算的可靠性和速度,即便在交通繁忙、连接不稳定或设备偶发故障的情况下。
为什么汽车需要路侧的帮忙
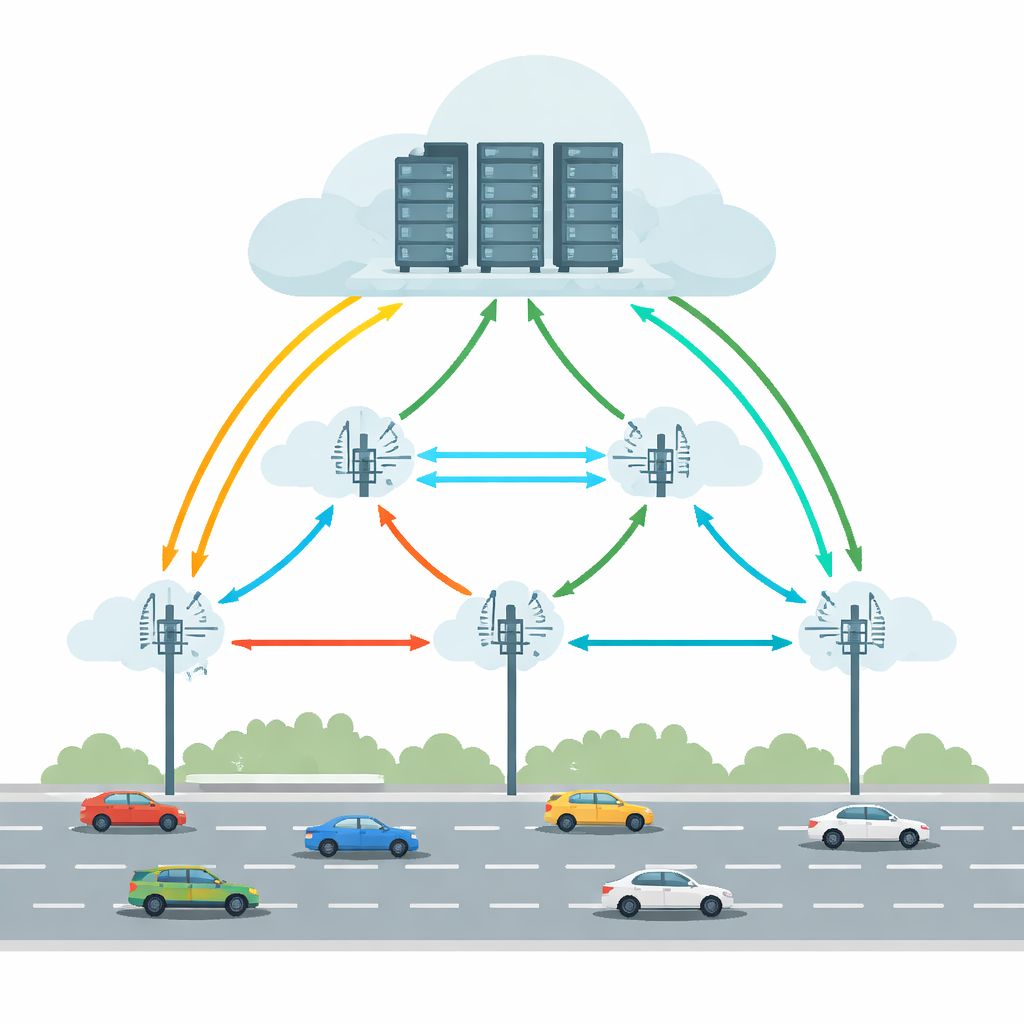
当今互联与自动驾驶车辆要运行物体检测、车道保持和增强现实导航等任务。若全部在车内完成,将需要强大的硬件和大量能耗。车载边缘云计算(VECC)通过允许车辆将高负载任务卸载到路侧单元(RSU)来应对这一点——这些路侧小型计算站又可以与更大的云服务器协作。但这种架构面临实际困难:车辆快速在RSU间移动、无线链路时断时连、边缘与云端机器可能超载或故障。这些因素会导致长延迟或任务失败,而这对时间敏感的驾驶应用来说是不可接受的。
在移动、延迟与故障之间取得平衡
许多先前系统通过预测车辆位置、最小化延迟或节省能耗来改进卸载。但它们通常把可靠性作为次要考虑,并常假设条件稳定。现实道路更加复杂:无线链路会中断、服务器会失败、交通模式会突变。本文认为,一个实用的解决方案必须同时考虑车辆移动性、网络延迟和故障风险,跨越多个RSU进行决策。同时需避免单一中央“脑”,因为随着路网扩张它会成为瓶颈。相反,决策应分布式进行,本地单元能快速反应,同时从更广的系统中学习。
沿路部署的双层学习“大脑”
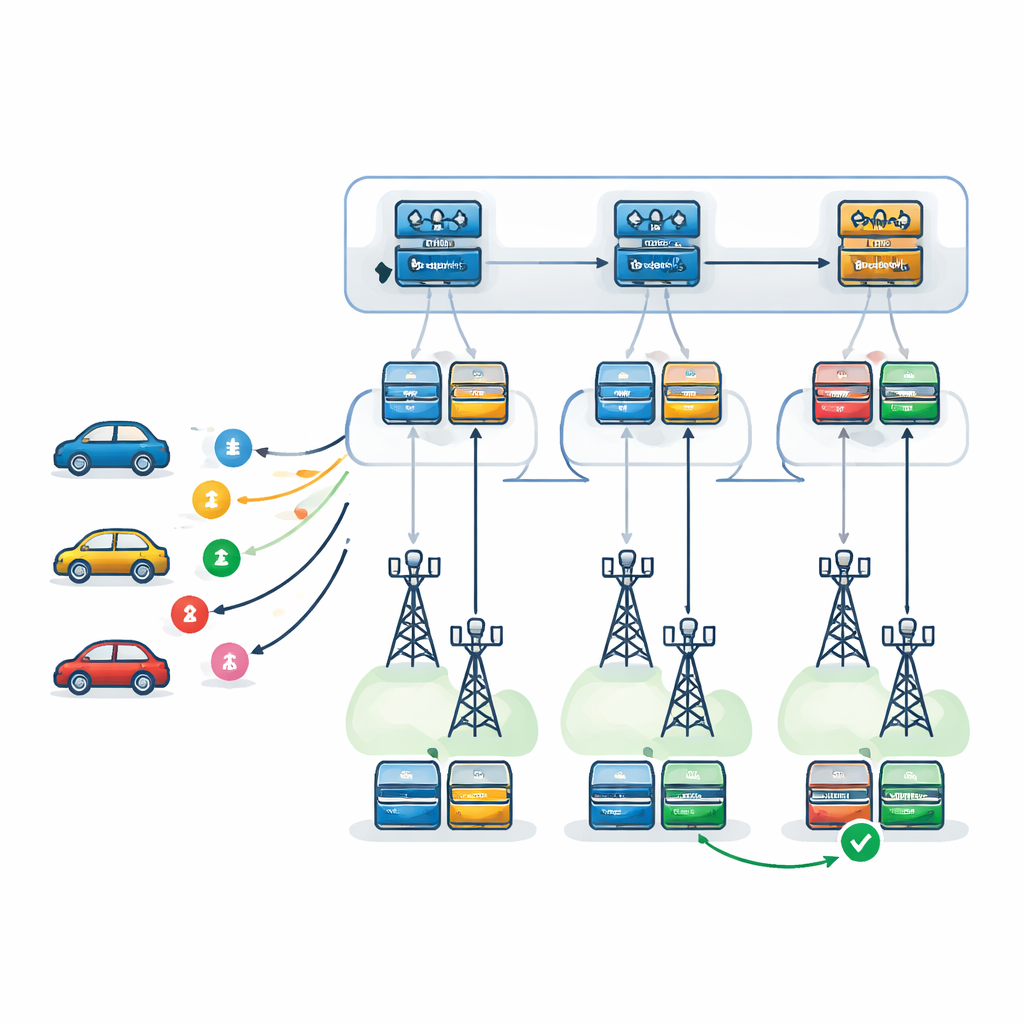
作者提出了由深度Q网络驱动的双层决策框架,这是一种通过试错学习的深度强化学习方法。在第一层,每个RSU都部署一个学习代理,选择哪个RSU最适合处理每个到来的任务。该代理会考虑各RSU的负载、处理能力、故障倾向、车辆预计行驶路径,以及将结果沿该路径送回所需的时间。在第二层,一旦选定了RSU,当地代理会决定具体如何执行任务:哪个服务器作为主服务器,哪个作为备份,以及采用哪种故障恢复策略。文中考虑了三种策略:在同一服务器上重试、故障后切换到备份服务器、或者主备并行运行并保留先完成者。
在虚拟城市中测试系统
为了检验这一双层学习架构的有效性,研究人员构建了一个将交通系统(SUMO)与事件驱动引擎(SimPy)耦合的详细仿真器。该仿真器能够模拟车辆移动、变化的无线条件以及边缘和云服务器的现实排队情况。他们将该方法与若干替代方案进行了比较:使用不同学习算法(近端策略优化,PPO)的类似双层系统、总是选择当下看起来最优的简单贪心策略、不转发而仅由首个接收任务的RSU处理的方案,以及试图一次性做出所有决策的单层学习代理。在多次试验及不同交通强度下,他们测量了平均回报、总体延迟以及任务失败或错过截止的频率。
繁忙道路上的测试结果说明
在轻度交通和相对宽松的截止时间下,大多数方法表现相近,因为资源未被充分利用。差异体现在交通繁重、负载不均且时限更紧张的情形——也正是最具挑战性的场景。在这些设置中,双层深度Q网络相比其他方法将任务失败率降低了约29%至63%,总体回报提高了大约8%至38%。随着RSU和服务器数量增长,分层结构比单层学习器更具可扩展性;即便RSU之间的通信存在不可靠性或对车辆未来路径的预测并不完美,该方法仍表现出鲁棒性。
这对日常驾驶意味着什么
简言之,研究表明赋予路网分层的“学习大脑”可以使互联与自动驾驶车辆更灵敏、更可靠。通过先为每个任务选择合适的路侧单元,再规划该任务如何在延迟与故障中生存,系统既能保持低响应时间,又提高了结果在时限内到达的概率。尽管现实部署仍需应对复杂环境与安全问题,这项工作勾勒出通向更智能、容错的数字基础设施的路径,以满足未来汽车日益增长的计算需求。
引用: Babaiyan, V., Bushehrian, O. & Javidan, R. A bi-level mobility-aware deep reinforcement learning approach for fault-tolerant task offloading in vehicular edge-cloud computing. Sci Rep 16, 11703 (2026). https://doi.org/10.1038/s41598-026-45763-z
关键词: 车载边缘计算, 任务卸载, 深度强化学习, 容错, 智能交通系统