Clear Sky Science · ja
車両エッジクラウドコンピューティングにおけるフォールトトレラントなタスクオフロードのための、移動性を考慮した二層深層強化学習アプローチ
データを必要とする車のためのより賢い道路
現代の自動車は走るコンピュータになりつつあり、常にカメラ映像、センサーデータ、ナビ情報を処理しています。これらの多くはミリ秒単位で処理される必要があり、運転者の安全やサービスの応答性に直結します。本稿は、車両のデジタルな「作業」を車内、路側の小型コンピュータ、遠隔のクラウドサーバーのいずれで処理するかを調整することで、このリアルタイム計算をより信頼性高く速くする方法を探ります。交通が混雑し、接続が不安定で、機器が時折故障するような状況でも有効な仕組みを目指します。
なぜ車は道路側の助けを必要とするのか
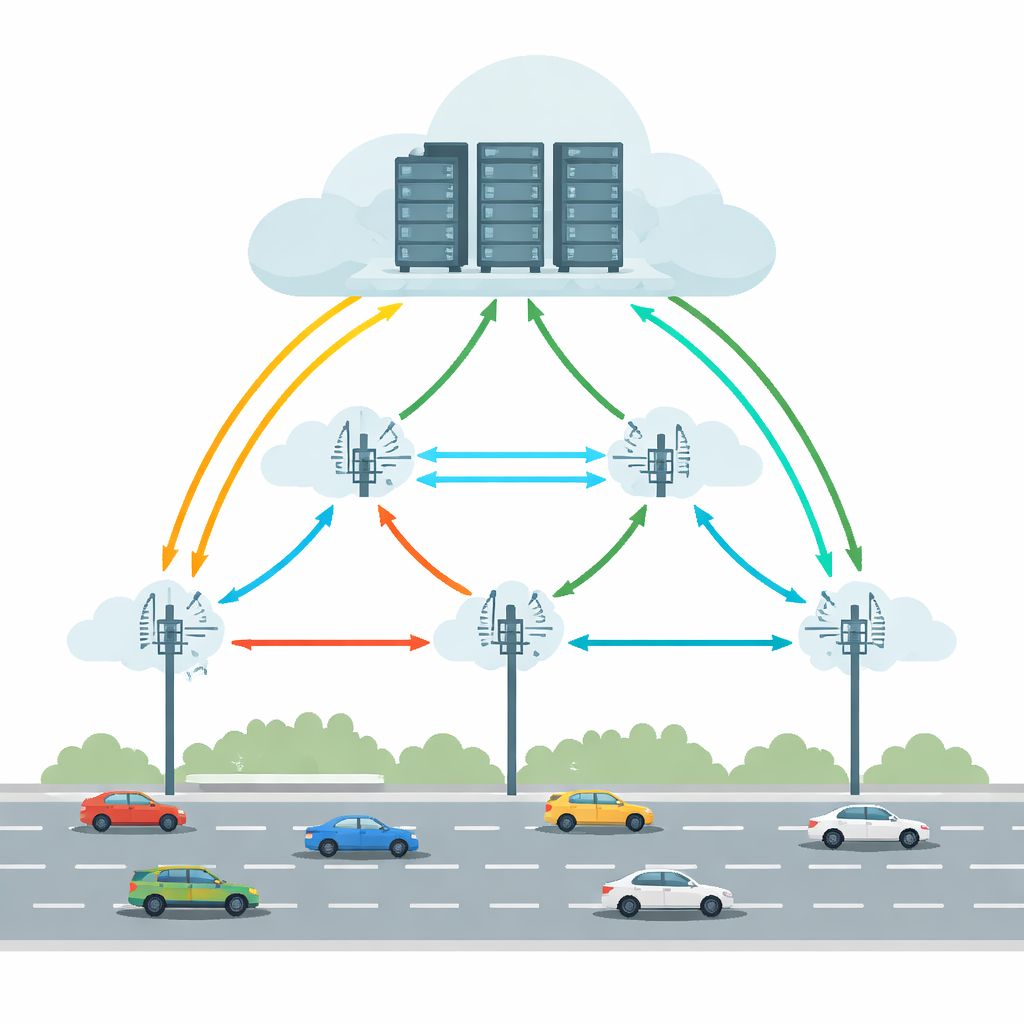
現在のコネクテッド車や自動運転車は、物体検出、レーン保持、拡張現実ナビゲーションなどのタスクを実行します。これらをすべて車内のみで処理するには高性能なハードウェアと大きな消費電力が必要です。車両エッジクラウドコンピューティング(VECC)は、車が要求の高い処理を路側ユニット(RSU)と呼ばれる道路沿いの小型計算拠点にオフロードし、さらにそれらが大規模なクラウドサーバと協調できるようにすることでこの問題に対処します。しかし、この構成は実用上の課題に直面します:車はRSU間を高速で移動し、無線リンクは断続的であり、エッジやクラウドの機器は過負荷や故障を起こす可能性があります。これらが組み合わさると、遅延の増大やタスクの失敗を招き、時間厳守が求められる運転用途では許容できません。
移動、遅延、故障のバランスを取る
従来の多くのシステムは、車両の位置を予測したり、遅延を最小化したり、エネルギーを節約したりすることでオフロードを改善しようとしてきました。しかし、これらは信頼性を後回しにしがちで、安定した条件を前提とすることが多いです。実際の道路はもっと複雑です:無線リンクは途切れ、サーバは故障し、交通パターンは突然変化します。本稿は、実用的な解決策は車両の移動性、ネットワーク遅延、故障リスクを同時に、複数のRSUにまたがって考慮する必要があると主張します。また、道路網の拡大に伴ってボトルネックになる単一の中央「頭脳」を避け、局所ユニットが迅速に反応しつつ全体から学習できる分散的な意思決定が必要です。
道路上の二層の学習型ブレイン
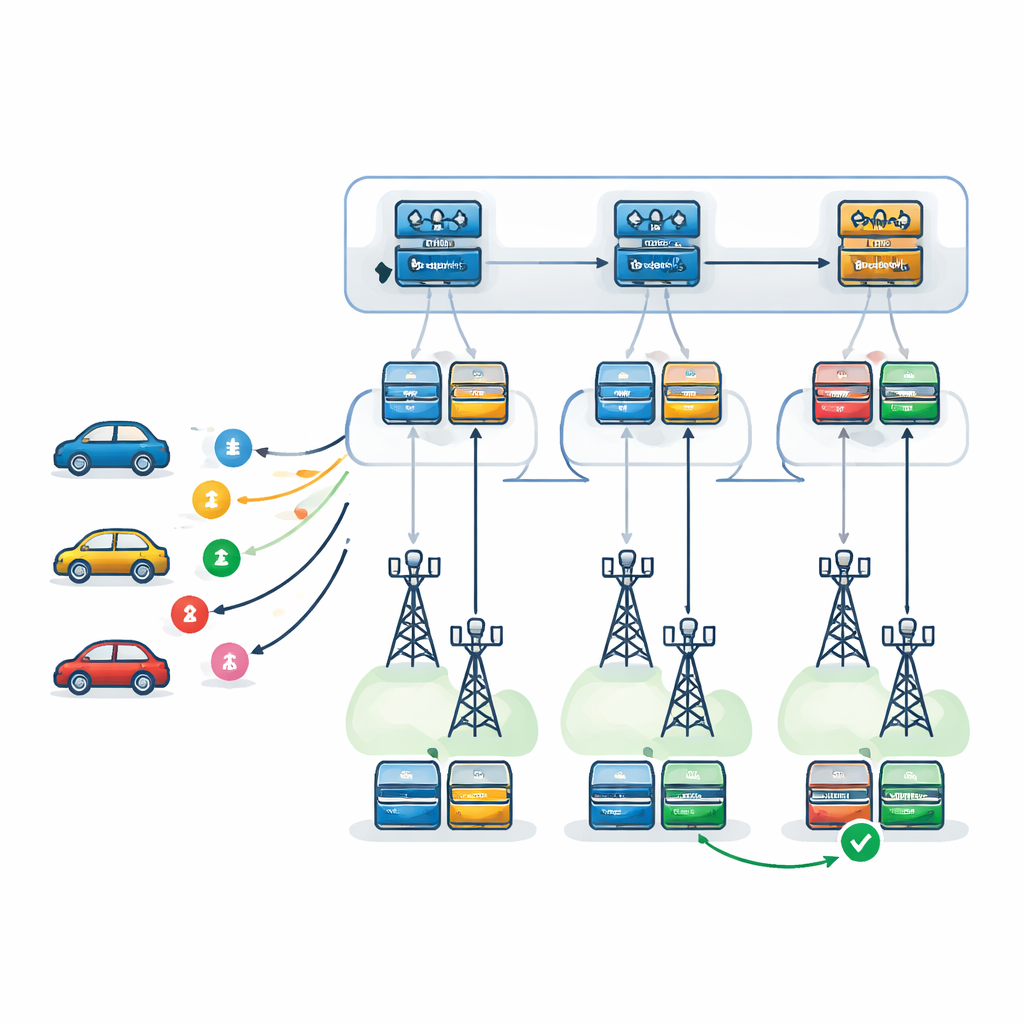
著者らは深層Qネットワーク(Deep Q-Network)に基づく二層の意思決定フレームワークを提案します。これは試行錯誤で学ぶ深層強化学習の一種です。第一層では、各RSUに複製された学習エージェントが、到着する各タスクをどのRSUで処理するのが最適かを選択します。この選択は、各RSUの負荷、処理能力、故障傾向、車両の予想移動経路、そして結果をその経路に沿って返送するのにかかる時間を考慮に入れます。第二層では、RSUが選ばれた後、ローカルエージェントがタスクをどのように実行するかを決定します:どのサーバをプライマリにするか、どれをバックアップにするか、そしてどの障害回復パターンを使うかを選びます。検討される戦略は三つです:同じサーバで再試行する、故障後にバックアップサーバへ切り替える、あるいはプライマリとバックアップを並列に実行して先に終わった方を採用する、です。
仮想都市でのシステム評価
この二層学習構成の有効性を検証するため、研究者らは交通システム(SUMO)とイベント駆動エンジン(SimPy)を連携させた詳細なシミュレータを構築しました。これにより、移動する車両、変化する無線環境、エッジやクラウドサーバの現実的なキューイングをモデル化できます。彼らは提案手法を複数の代替手法と比較しました:別の学習アルゴリズム(Proximal Policy Optimization)を用いた類似の二層システム、常に現時点で最も良さそうなRSUを選ぶ単純なグリーディ戦略、タスクを最初に受け取ったRSUのみで処理する転送無しの設定、そしてすべての決定を一括で行う単一の「フラット」学習エージェントです。多くのエピソードと異なる交通強度のもとで、平均報酬、全体の遅延、タスクが失敗したり締切を過ぎたりする頻度を測定しました。
混雑した道路で示された結果
交通が軽く締切が緩い状況では、資源が十分に余っているため、ほとんどの手法が同等の性能を示しました。差は、重く不均衡な交通やより厳しい時間制約――まさに重要なストレスの高い状況――で現れました。そのような環境では、二層Deep Q-Networkは他の手法に比べてタスクの失敗を約29%〜63%削減し、全体の報酬を約8%〜38%改善しました。階層構造はRSUやサーバの数が増えるにつれてフラットな学習器よりも拡張性が高いことが示され、RSU間の通信がやや不安定な場合や車両の将来経路の予測が不完全な場合でも堅牢性を保ちました。
日常のドライバーにとっての意味
簡潔に言えば、この研究は道路網に層化された「学習脳」を持たせることで、コネクテッドおよび自律車両の応答性と信頼性を高められることを示しています。まず各タスクに適した路側ユニットを選び、次に遅延や故障に耐えうる実行計画を立てることで、応答時間を短く保ち、回答がタイムリーに届く確率を高めます。実運用では依然として混乱した条件や安全性の問題に対処する必要がありますが、本研究は将来の車両の増大する計算需要に追従できる、より賢明でフォールトトレラントなデジタルインフラへの道筋を示しています。
引用: Babaiyan, V., Bushehrian, O. & Javidan, R. A bi-level mobility-aware deep reinforcement learning approach for fault-tolerant task offloading in vehicular edge-cloud computing. Sci Rep 16, 11703 (2026). https://doi.org/10.1038/s41598-026-45763-z
キーワード: 車両エッジコンピューティング, タスクオフロード, 深層強化学習, フォールトトレランス, 知能化交通システム