Clear Sky Science · pt
Uma abordagem de aprendizado por reforço profundo com consciência de mobilidade em dois níveis para descarregamento tolerante a falhas na computação veicular em borda-nuvem
Estradas mais inteligentes para carros famintos por dados
Os carros modernos estão se tornando computadores sobre rodas, processando constantemente fluxos de câmera, dados de sensores e informações de navegação. Grande parte desse trabalho precisa ocorrer em milissegundos para manter os motoristas seguros e os serviços responsivos. Este artigo explora como tornar esse processamento em tempo real mais rápido e confiável coordenando onde as “tarefas” digitais de um veículo são executadas — dentro do carro, em pequenos computadores à beira da estrada ou em servidores de nuvem distantes — mesmo quando o tráfego é intenso, as conexões são instáveis e dispositivos ocasionalmente falham.
Por que os carros precisam da ajuda da estrada
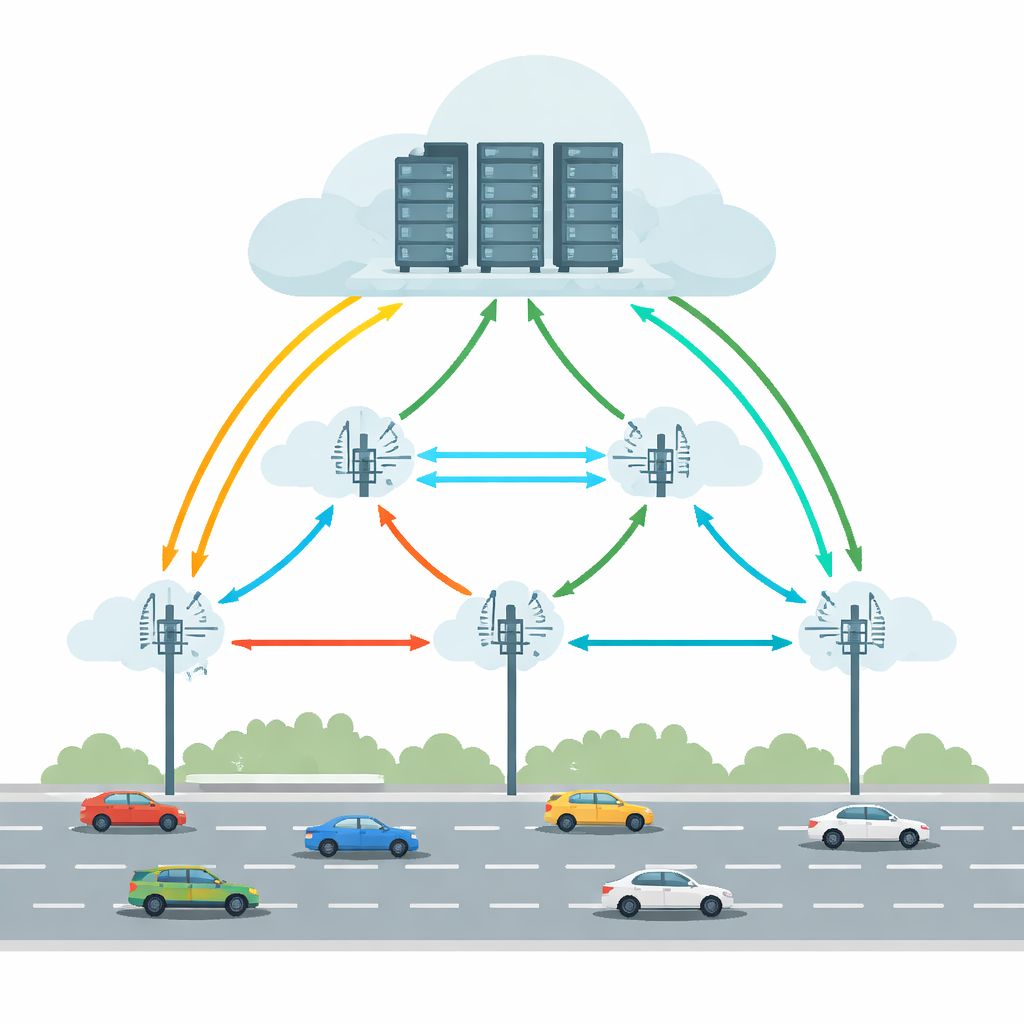
Veículos conectados e autônomos atualmente executam tarefas como detecção de objetos, manutenção de faixa e orientação por realidade aumentada. Fazer tudo isso apenas dentro do carro exigiria hardware potente e consumo significativo de energia. A Computação Veicular em Borda-Nuvem (VECC) soluciona isso permitindo que os carros descarreguem tarefas exigentes para Unidades à Beira da Estrada (RSUs) — pequenas estações de computação ao longo da via — que por sua vez podem cooperar com servidores em nuvem maiores. Mas esse arranjo enfrenta desafios práticos: os carros se movem rapidamente entre RSUs, enlaces sem fio aparecem e desaparecem, e tanto as máquinas de borda quanto as da nuvem podem ficar sobrecarregadas ou falhar. Esses fatores podem causar atrasos longos ou falhas totais nas tarefas, o que é inaceitável para aplicações veiculares críticas em tempo.
Equilibrando movimento, atrasos e falhas
Muitos sistemas anteriores tentaram melhorar o descarregamento prevendo onde um carro estará, minimizando atraso ou economizando energia. Porém, geralmente tratavam a confiabilidade como algo secundário e muitas vezes assumiam condições estáveis. As estradas reais são mais bagunçadas: enlaces sem fio podem cair, servidores podem falhar e padrões de tráfego podem mudar de repente. Este artigo argumenta que uma solução prática deve considerar mobilidade veicular, atrasos de rede e risco de falhas simultaneamente, abrangendo múltiplas RSUs. Além disso, precisa evitar um único “cérebro” central que se torne gargalo conforme a rede de estradas cresce. Em vez disso, a tomada de decisão deve ser distribuída, com unidades locais que possam reagir rapidamente enquanto ainda aprendem com o sistema mais amplo.
Cérebros de aprendizado em dois níveis ao longo da estrada
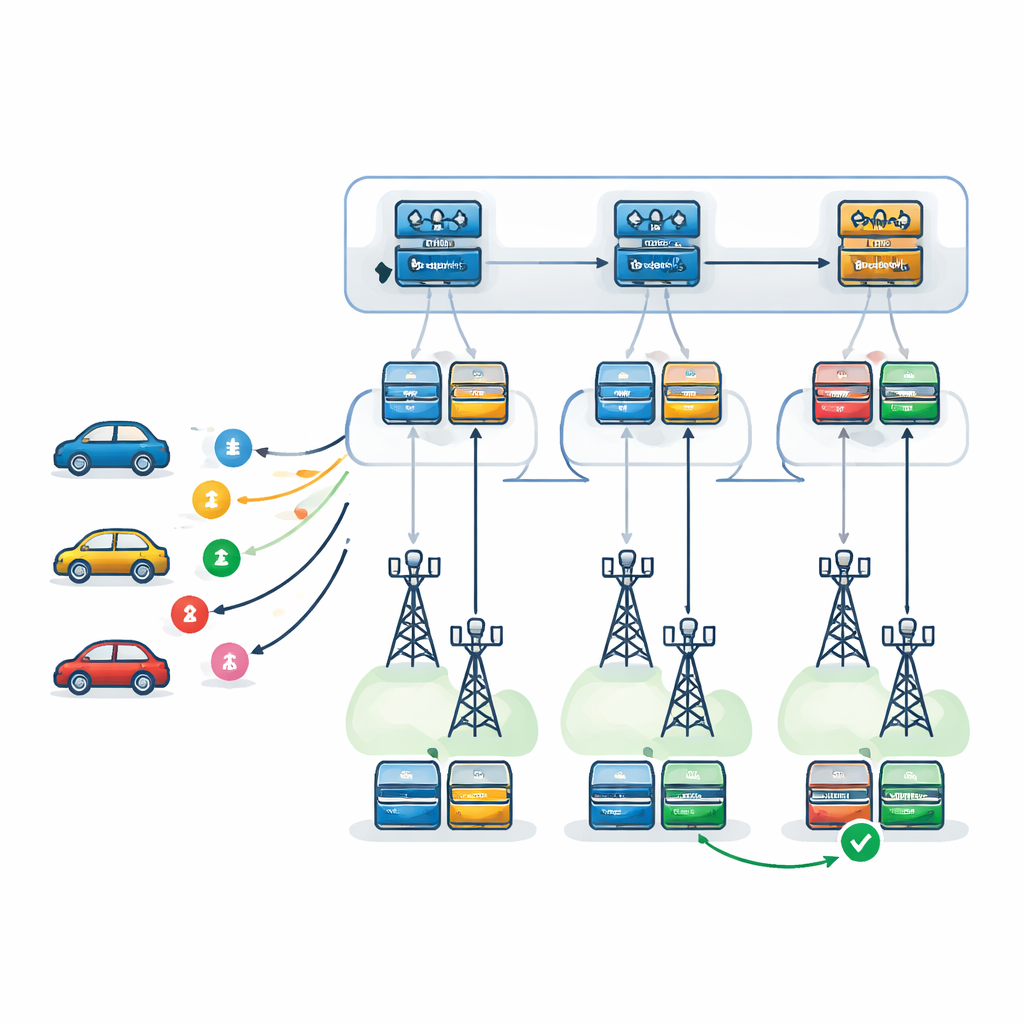
Os autores propõem uma estrutura de decisão em dois níveis alimentada por Deep Q-Networks, um tipo de aprendizado por reforço profundo que aprende por tentativa e erro. No primeiro nível, um agente de aprendizado — replicado em cada RSU — escolhe qual RSU é mais adequada para lidar com cada tarefa que chega. Ele considera a carga de cada RSU, poder de processamento, tendências de falha e o trajeto esperado do veículo, assim como o tempo necessário para devolver os resultados ao longo desse trajeto. No segundo nível, uma vez escolhida a RSU, um agente local decide exatamente como executar a tarefa: qual servidor deve ser primário, qual servir como backup e qual padrão de recuperação de falhas usar. Três estratégias são consideradas: tentar novamente no mesmo servidor, alternar para um servidor backup após uma falha, ou executar primário e backup em paralelo e manter aquele que terminar primeiro.
Testando o sistema em uma cidade virtual
Para avaliar quão bem essa configuração de aprendizado em dois níveis funciona, os pesquisadores construíram um simulador detalhado que acopla um sistema de tráfego (SUMO) com um motor baseado em eventos (SimPy). Isso lhes permitiu modelar veículos em movimento, condições sem fio variáveis e filas realistas em servidores de borda e nuvem. Compararam seu método com várias alternativas: um sistema em dois níveis similar usando um algoritmo de aprendizado diferente (Proximal Policy Optimization), uma estratégia gananciosa simples que sempre escolhe a RSU aparentemente melhor no momento, uma configuração sem encaminhamento em que as tarefas são tratadas apenas pela RSU que as recebe primeiro, e um agente de aprendizado “plano” único que tenta tomar todas as decisões de uma vez. Ao longo de muitos episódios e sob diferentes intensidades de tráfego, mediram recompensas médias, atraso geral e com que frequência tarefas falharam ou perderam seus prazos.
O que os resultados mostram em estradas movimentadas
Com tráfego leve e prazos relativamente folgados, a maioria dos métodos teve desempenho semelhante porque os recursos estavam subutilizados. As diferenças apareceram sob tráfego pesado, desequilibrado e com restrições de tempo mais apertadas — exatamente as situações estressantes que mais importam. Nesses cenários, a Deep Q-Network em dois níveis reduziu falhas de tarefas em cerca de 29% a 63% em comparação com outras abordagens, e melhorou a recompensa geral em aproximadamente 8% a 38%. A estrutura hierárquica mostrou-se mais escalável que o aprendiz plano à medida que o número de RSUs e servidores cresceu, e permaneceu robusta mesmo quando a comunicação entre RSUs era um tanto instável ou quando as previsões sobre a rota futura de um veículo eram imperfeitas.
O que isso significa para motoristas no dia a dia
Em termos simples, o estudo mostra que dar à rede viária um “cérebro” em camadas pode tornar veículos conectados e autônomos mais responsivos e confiáveis. Ao primeiro escolher a unidade à beira da estrada adequada para cada tarefa e então planejar como essa tarefa deve sobreviver a atrasos e falhas, o sistema mantém os tempos de resposta baixos e aumenta a chance de que as respostas cheguem antes do prazo. Embora a implantação no mundo real ainda precise lidar com condições adversas e questões de segurança, este trabalho delineia um caminho rumo a uma infraestrutura digital mais inteligente e tolerante a falhas que pode acompanhar as crescentes demandas computacionais dos carros do futuro.
Citação: Babaiyan, V., Bushehrian, O. & Javidan, R. A bi-level mobility-aware deep reinforcement learning approach for fault-tolerant task offloading in vehicular edge-cloud computing. Sci Rep 16, 11703 (2026). https://doi.org/10.1038/s41598-026-45763-z
Palavras-chave: computação em borda veicular, descarregamento de tarefas, aprendizado por reforço profundo, tolerância a falhas, sistemas inteligentes de transporte