Clear Sky Science · zh
MoC-TSCH:基于多目标 MILP 的 TSCH 移动性优化,用于 IIoT 网络覆盖与连通性
更智能的移动工厂网络
现代工厂充斥着无线传感器和移动机器人,但当一切都在移动时,保持所有设备连接且及时传输数据非常困难。本文探讨了一种新的方式来协调固定传感器与巡航机器人共享无线资源,使机器能更快、更可靠地获取数据,同时减少能量浪费。
为什么当今工厂无线通信会遇到困难
许多工业传感器使用一种称为时隙跳频(time-slotted channel hopping,TSCH)的方法,各设备遵循精确的时间表并定期切换无线信道。当机器和传感器静止时,这种方法能有效降低干扰并节省电池能量。但一旦机器人、无人机或移动运输工具进入场景,网络拓扑就不断变化。链路会断开再重建,设备必须反复重新加入网络,精心规划的调度不再与实际情况匹配,从而导致盲区、延迟增加和额外的能量消耗。
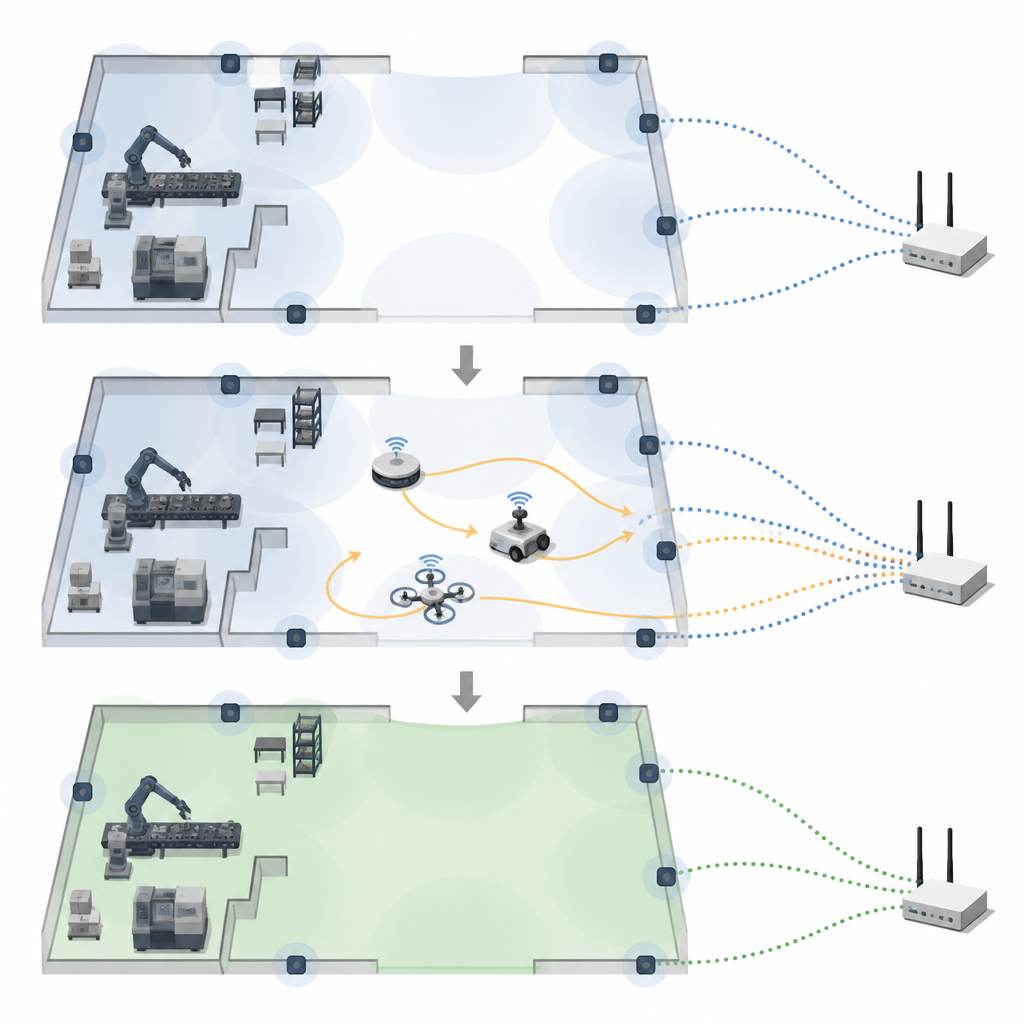
将固定传感器与巡航辅助结合
作者提出一种混合布局,将沿工厂边缘布置的静态传感器与在内走廊巡航的移动辅助设备(如机器人)结合使用。固定节点为通信提供稳定骨干,而移动节点巡逻未覆盖的区域、弥补感知空白并将数据传输到中心汇聚点。系统不再靠人工摆放设备,而是利用数学规划决定每个静态传感器的位置以及移动节点随时间的移动方式,以便在不大量增加硬件的情况下观测到大部分空间。
同时规划路径与空中时隙
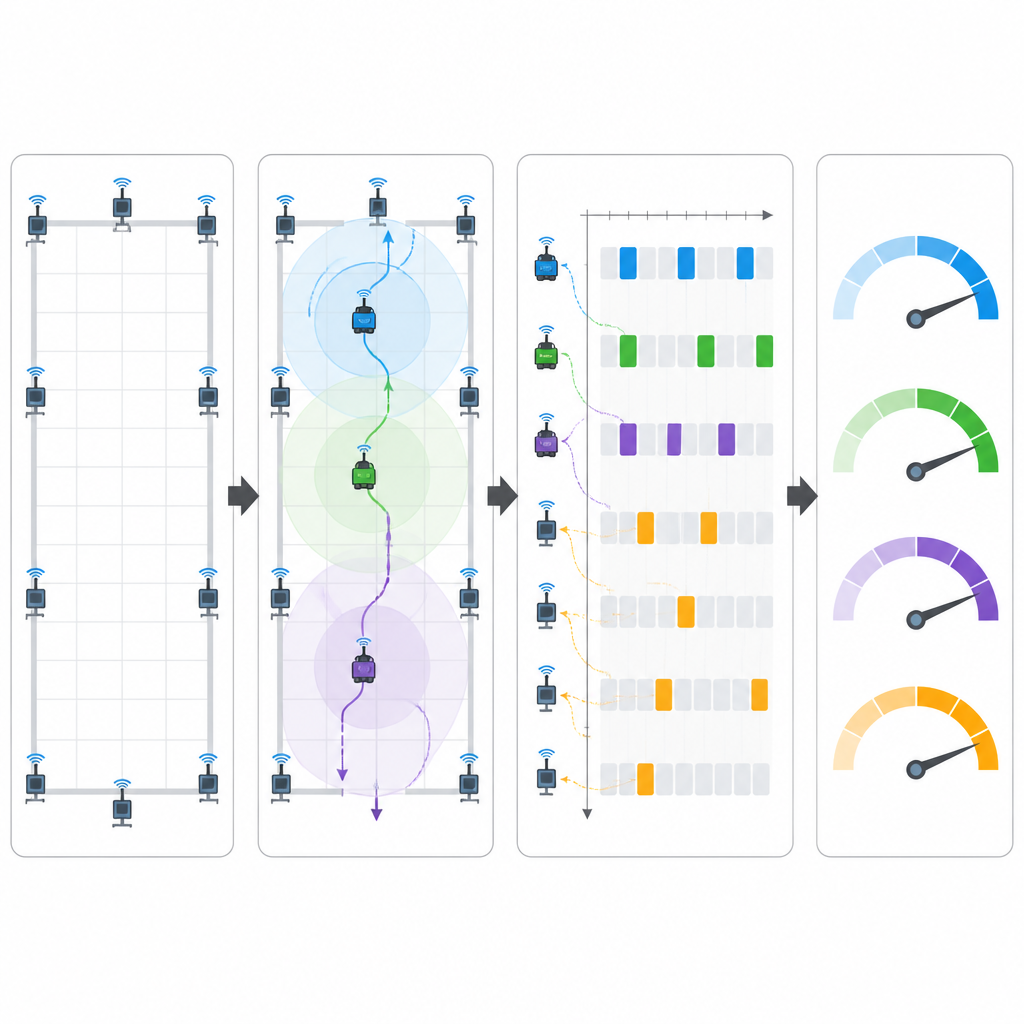
该方法核心称为 MoC-TSCH 的优化引擎同时权衡三个目标:区域覆盖度、通信链路质量以及移动节点的移动成本。通过调整简单的权重,操作者可以偏好更广的覆盖、更少的机器人移动或更好的链路质量。相同框架还指导无线时隙和信道的分配,随机器人移动对变化做出响应。在计算机仿真中,这种联合规划将覆盖率从约 40% 提升到超过 88%,缩短新节点加入网络所需时间,将消息平均时延从 128 毫秒降至 89 毫秒,并大约减少 40% 的无线能耗。
从仿真到真实机器人
为验证该想法在软件模型之外的表现,团队构建了室内测试床。小型蓝牙传感板布置在实验室周围,将数据发送到搭载在 TurtleBot 移动机器人的 Raspberry Pi 计算机上。机器人携带一个工业无线节点,通过时隙化网络将信息中继到固定根节点。由于优化运算对微型处理器而言负担较重,路径和部署在离线计算后加载到固件中。即便在该限制以及蓝牙转发带来额外延迟的情况下,系统仍实现了超过 93% 的高可靠性和比标准时隙化配置更低的延迟,反映出与仿真相似的趋势。
对未来工厂的意义
简言之,这项研究表明,将部署位置、移动策略与无线调度作为一个整体设计问题来处理,可以在不简单增加硬件的前提下,使工厂无线网络既更完整又更灵敏。MoC-TSCH 协调传感器位置、机器人移动和各设备的通信时机,使机器获得更新鲜的数据、减少丢包并降低电池消耗。尽管当前工作侧重于小型室内布局和预规划路径,但它指向未来的工业现场,其中机器人与传感器队列可以协同调整其移动与空中时隙,从而使数字孪生和控制系统与物理世界保持紧密同步。
引用: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
关键词: 工业物联网, 无线传感器网络, 移动机器人, 网络调度, 工厂自动化