Clear Sky Science · en
MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT
Smarter factory networks on the move
Modern factories are filling up with wireless sensors and mobile robots, but keeping all of these devices connected and timely is hard when everything is in motion. This paper explores a new way to choreograph how fixed sensors and roaming robots share the airwaves so that machines get data quickly, reliably, and with less wasted energy.
Why today’s factory radios struggle
Many industrial sensors use a method called time-slotted channel hopping, where every device follows a precise timetable and regularly changes radio channels. This works well when machines and sensors stay put, since it reduces interference and saves battery power. Once robots, drones, or moving vehicles enter the scene, the network map keeps changing. Links drop in and out, devices must repeatedly rejoin the network, and carefully planned schedules no longer match reality, leading to blind spots, delays, and extra energy drain.
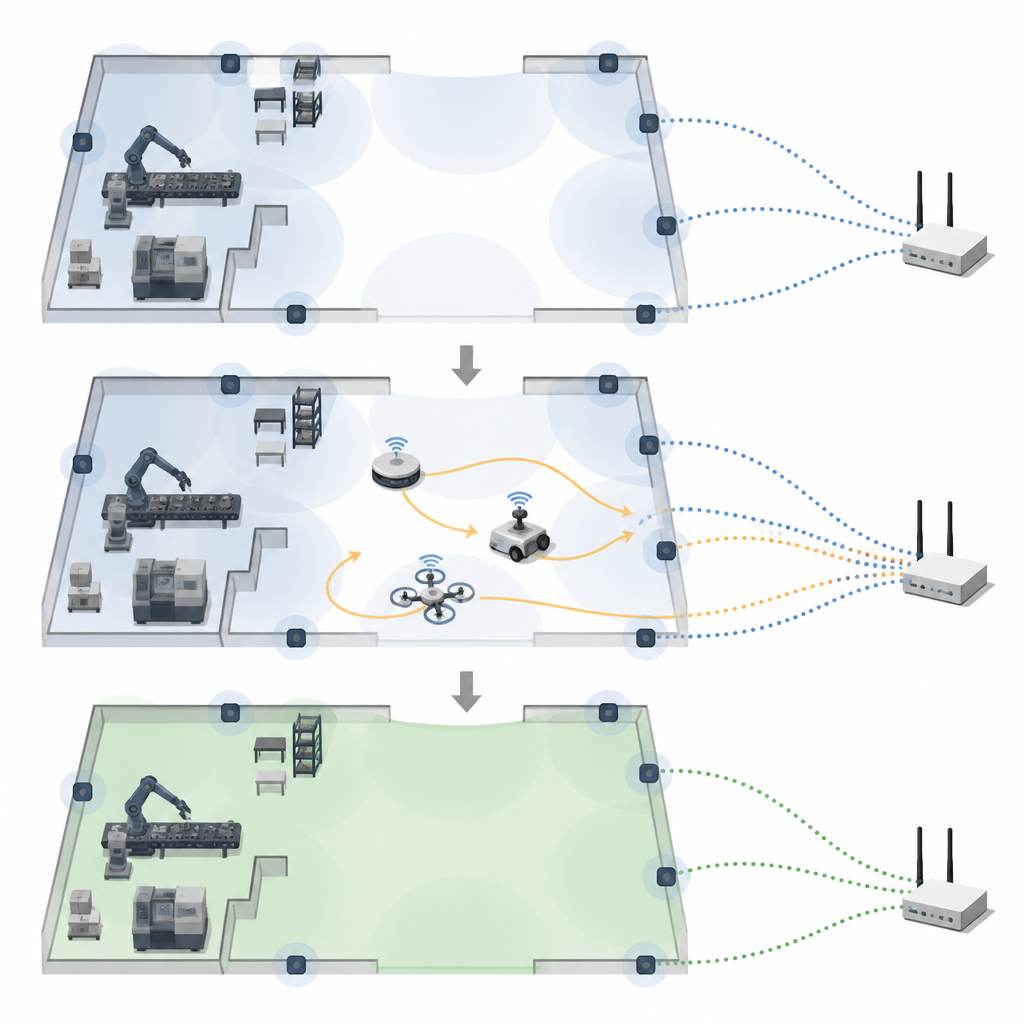
Mixing fixed sensors with roaming helpers
The authors propose a hybrid layout that combines static sensors mounted along the edges of a factory area with mobile helpers such as robots moving through interior corridors. Fixed nodes provide a stable backbone for communication, while mobile nodes patrol uncovered regions, fill gaps in sensing, and carry data toward a central sink. Instead of placing devices by hand, the system uses mathematical planning to decide where to put each static sensor and how mobile nodes should move over time so that most of the space is observed without flooding the floor with hardware.
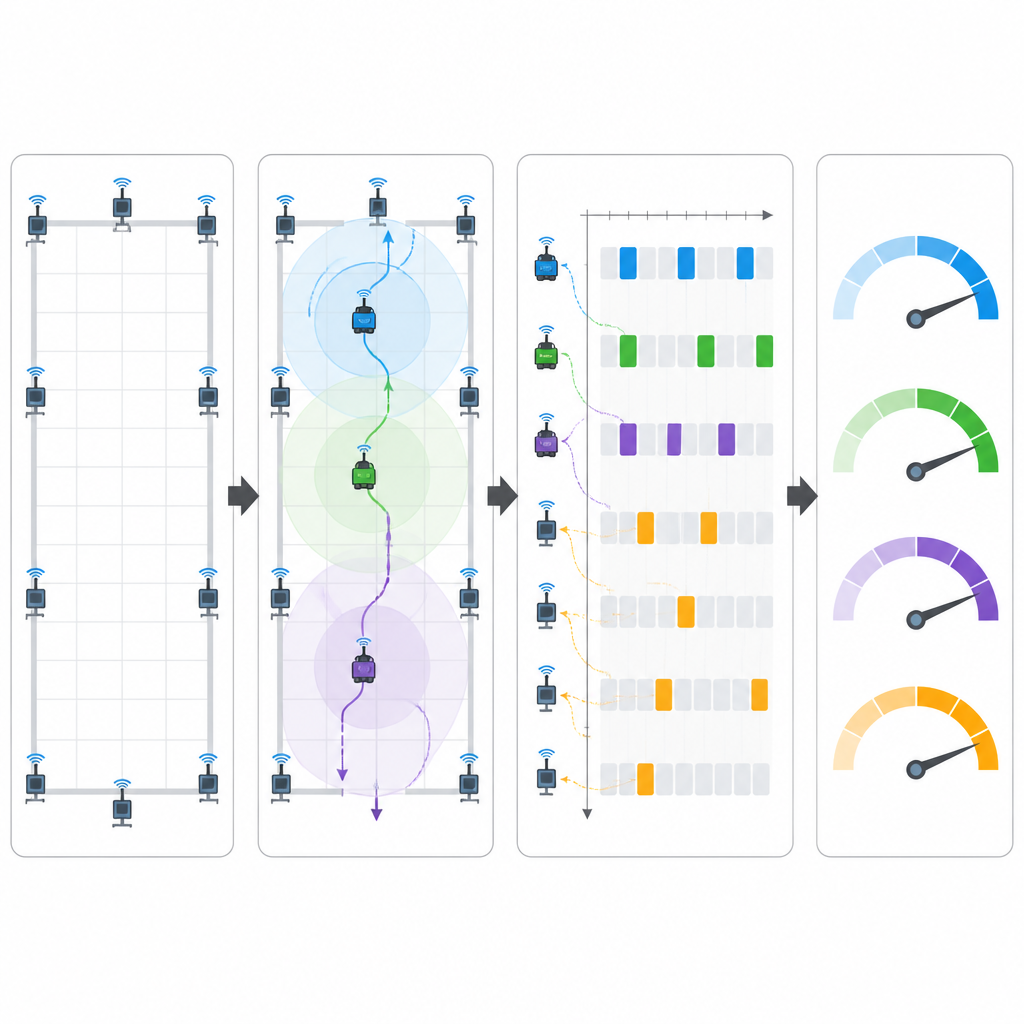
Planning paths and airtime together
At the heart of the approach, called MoC-TSCH, is an optimization engine that weighs three goals at once: how well the area is covered, how good the communication links are, and how costly it is for mobile nodes to move. By adjusting simple weights, an operator can favor wider coverage, fewer robot movements, or better link quality. The same framework also steers how radio timeslots and channels are assigned, reacting to changes as robots move. In computer simulations, this joint planning boosts coverage from about 40 percent to over 88 percent, shortens the time new nodes need to join the network, cuts the average delay for messages from 128 to 89 milliseconds, and reduces radio energy use by roughly 40 percent.
From simulation to real robots
To see how the idea works beyond software models, the team built an indoor testbed. Small Bluetooth sensor boards were placed around a lab, sending data to a Raspberry Pi computer on a TurtleBot mobile robot. The robot carried an industrial radio node that relayed information over a time-slotted network to a fixed root node. Because the optimization math is heavy for tiny processors, the routes and placements were computed offline and then loaded into the firmware. Even with this constraint and added delays from Bluetooth forwarding, the system still achieved high reliability above 93 percent and lower delay than a standard time-slotted setup, mirroring trends seen in simulation.
What this means for future factories
In plain terms, the study shows that treating placement, movement, and radio scheduling as one combined design problem can make wireless factory networks both more complete and more responsive, without simply adding more hardware. MoC-TSCH coordinates where sensors sit, how robots move, and when each device talks so that machines get fresher data with fewer dropped messages and reduced battery use. While the current work focuses on small indoor layouts and preplanned paths, it points toward future industrial sites where fleets of robots and sensors can adapt their movements and airtime in concert to keep digital replicas and control systems closely in sync with the physical world.
Citation: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Keywords: industrial internet of things, wireless sensor networks, mobile robots, network scheduling, factory automation