Clear Sky Science · pl
MoC-TSCH: optymalizacja mobilności TSCH oparta na wielokryterycznym MILP dla pokrycia i łączności sieci w IIoT
Sprytniejsze sieci fabryczne w ruchu
Nowoczesne fabryki zapełniają się bezprzewodowymi czujnikami i mobilnymi robotami, ale utrzymanie łączności i terminowości przesyłu danych jest trudne, gdy wszystko się porusza. W artykule opisano nowe podejście do koordynacji korzystania ze spektrum przez stacjonarne czujniki i poruszające się roboty, tak aby maszyny otrzymywały dane szybko, niezawodnie i przy mniejszym marnotrawstwie energii.
Dlaczego dzisiejsze radiotelefony w fabrykach mają problemy
Wiele czujników przemysłowych korzysta z metody zwanej time-slotted channel hopping (TSCH), w której każde urządzenie przestrzega ścisłego harmonogramu i regularnie zmienia kanały radiowe. Dobrze sprawdza się to, gdy maszyny i czujniki pozostają na stałych miejscach — zmniejsza zakłócenia i oszczędza baterię. Gdy w scenie pojawiają się roboty, drony lub pojazdy, mapa sieci ciągle się zmienia. Łącza zrywają się i odtwarzają, urządzenia muszą wielokrotnie ponownie dołączać do sieci, a starannie zaplanowane harmonogramy przestają odpowiadać rzeczywistości, co prowadzi do martwych stref, opóźnień i zwiększonego zużycia energii.
Mieszanie stacjonarnych czujników z przemieszczającymi się pomocnikami
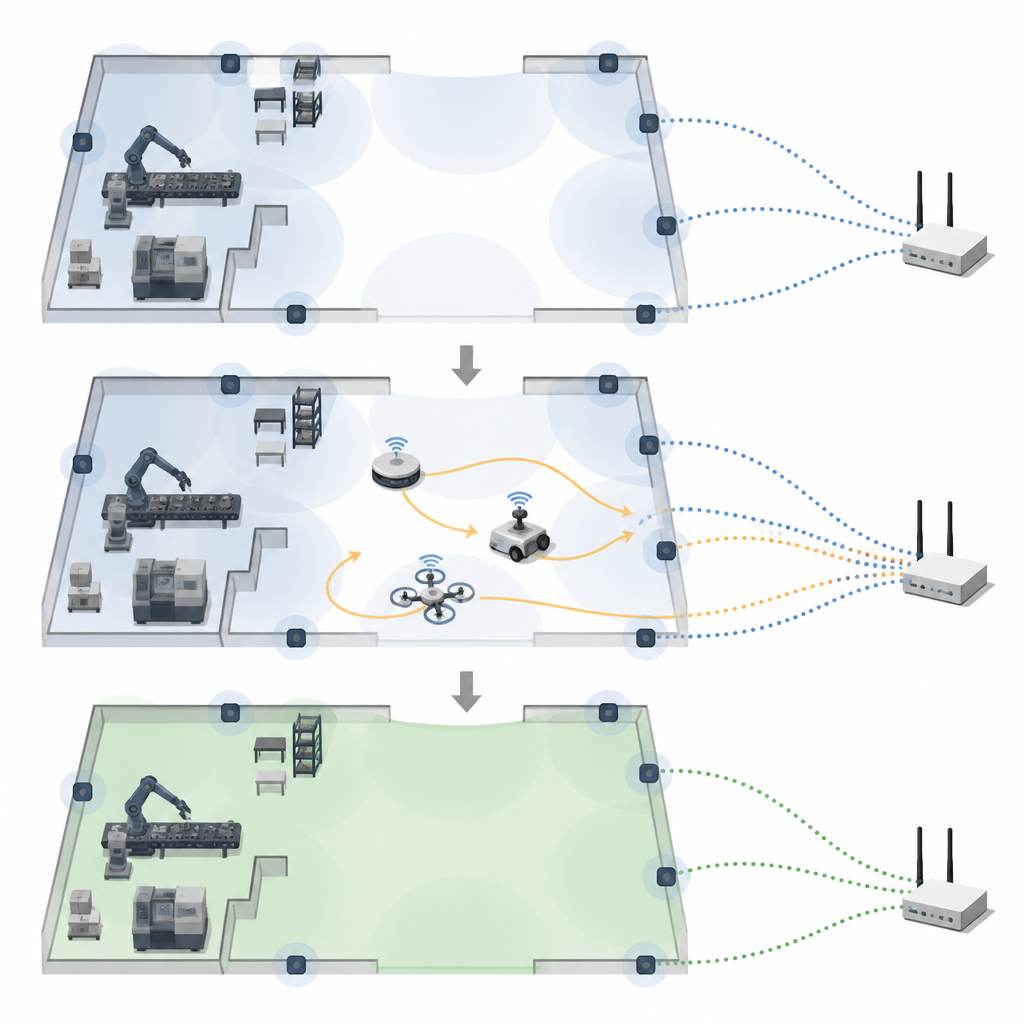
Autorzy proponują układ hybrydowy, który łączy statyczne czujniki montowane wzdłuż krawędzi obszaru fabrycznego z mobilnymi pomocnikami, takimi jak roboty poruszające się korytarzami wnętrza. Węzły stacjonarne tworzą stabilny trzon komunikacyjny, podczas gdy węzły mobilne patroliją niepokryte obszary, wypełniają luki w obserwacji i przenoszą dane do centralnego zlewu. Zamiast ręcznego rozmieszczania urządzeń, system wykorzystuje planowanie matematyczne do ustalenia, gdzie umieścić każdy czujnik stacjonarny i jak węzły mobilne powinny się poruszać w czasie, aby większość przestrzeni była obserwowana bez zatłaczania hali sprzętem.
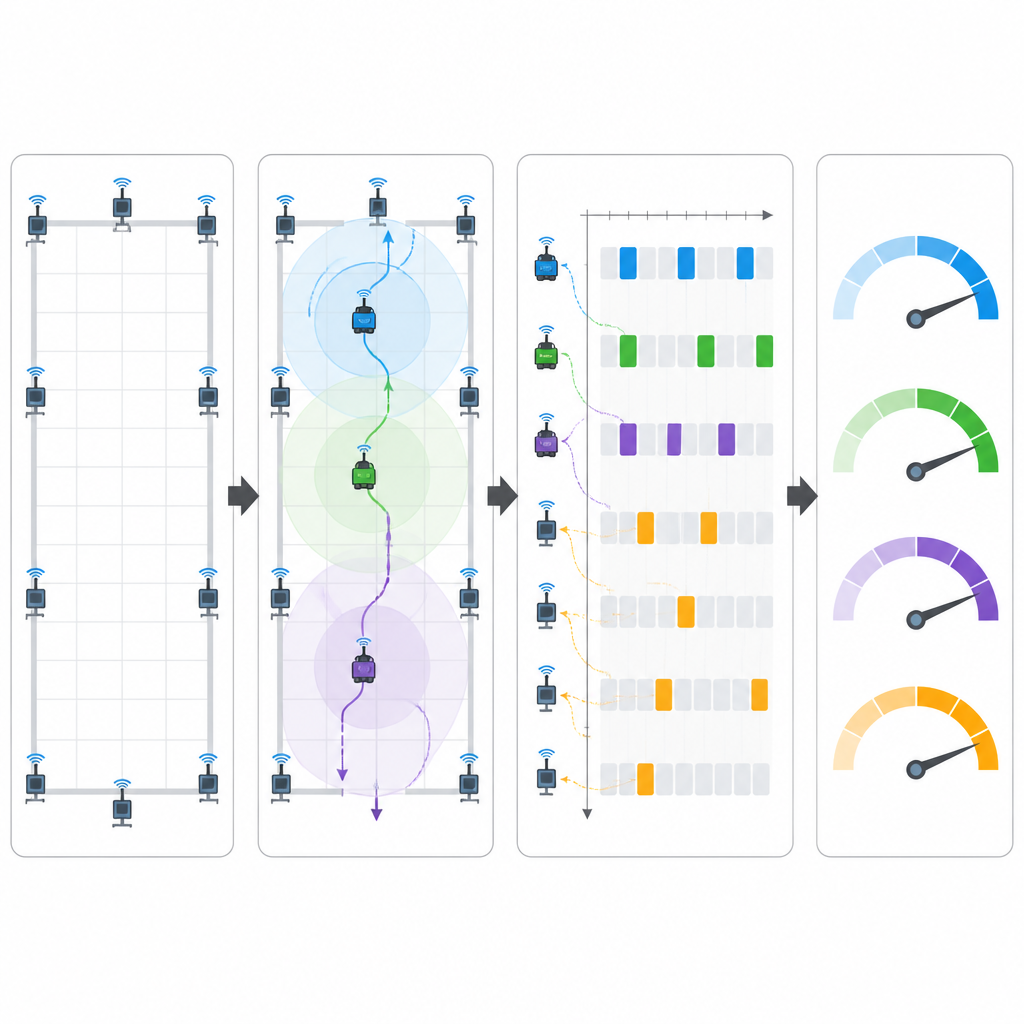
Planowanie tras i czasu nadawania razem
W sercu podejścia, nazwanego MoC-TSCH, znajduje się silnik optymalizacyjny, który jednocześnie balansuje trzy cele: jak dobrze pokryty jest obszar, jak dobre są łącza komunikacyjne oraz ile kosztuje przemieszczanie się węzłów mobilnych. Poprzez dostosowanie prostych wag operator może faworyzować szersze pokrycie, mniejsze przemieszczenia robotów lub lepszą jakość łączy. Ten sam schemat kieruje też przydziałem timeslotów i kanałów radiowych, reagując na zmiany w miarę ruchu robotów. W symulacjach komputerowych wspólne planowanie zwiększa pokrycie z około 40 procent do ponad 88 procent, skraca czas potrzebny nowym węzłom na dołączenie do sieci, redukuje średnie opóźnienie wiadomości z 128 do 89 milisekund oraz zmniejsza zużycie energii radiowej o około 40 procent.
Od symulacji do rzeczywistych robotów
Aby sprawdzić działanie koncepcji poza modelami programowymi, zespół zbudował testowe środowisko wewnętrzne. Małe płytki czujników Bluetooth rozmieszczono wokół laboratorium, wysyłające dane do komputera Raspberry Pi na mobilnym robocie TurtleBot. Robot przenosił przemysłowy węzeł radiowy, który przekazywał informacje przez sieć opartą na time-slotted do stacjonarnego węzła głównego. Ponieważ obliczenia optymalizacyjne są za ciężkie dla mikrokontrolerów, trasy i rozmieszczenia obliczono offline i wgrano do firmware’u. Nawet przy tym ograniczeniu i dodatkowymi opóźnieniami wynikającymi z przekazywania przez Bluetooth, system osiągnął wysoką niezawodność powyżej 93 procent i niższe opóźnienia niż standardowe rozwiązanie oparte na time-slotted, odzwierciedlając trendy ze symulacji.
Co to oznacza dla przyszłych fabryk
Mówiąc prosto, badanie pokazuje, że traktowanie rozmieszczenia, ruchu i harmonogramowania radiowego jako jednego zintegrowanego problemu projektowego może uczynić bezprzewodowe sieci fabryczne bardziej kompletne i responsywne, bez prostego dodawania większej ilości sprzętu. MoC-TSCH koordynuje, gdzie siedzą czujniki, jak poruszają się roboty i kiedy każde urządzenie nadaje, tak aby maszyny otrzymywały świeższe dane przy mniejszej liczbie utraconych wiadomości i obniżonym zużyciu baterii. Chociaż obecna praca koncentruje się na małych układach wewnętrznych i zaplanowanych z góry trasach, wskazuje drogę ku przyszłym zakładom przemysłowym, w których floty robotów i czujników będą mogły wspólnie adaptować ruchy i czas nadawania, aby utrzymywać cyfrowe repliki i systemy kontrolne ściśle zsynchronizowane ze światem fizycznym.
Cytowanie: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Słowa kluczowe: przemysłowy internet rzeczy, bezprzewodowe sieci czujników, mobilne roboty, harmonogramowanie sieci, automatyzacja fabryk