Clear Sky Science · he
MoC-TSCH: אופטימיזציה תזמונית TSCH רב-מטרית מבוססת MILP לכיסוי וחיבורת רשת ב-IIoT
רשתות מפעל חכמות בתנועה
מפעלים מודרניים מתמלאים בחיישנים אלחוטיים ורובוטים ניידים, אך שימור הקישוריות והזמניות של כל המכשירים האלה קשה כשכולם בתנועה. מאמר זה בוחן דרך חדשה לתזמן את שיתוף האוויר בין חיישנים קבועים ורובוטים נודדים כך שמכונות יקבלו נתונים במהירות, באמינות ובצריכת אנרגיה נמוכה יותר.
מדוע הרדיו של המפעל מתקשה היום
רבים מהחיישנים התעשייתיים משתמשים בשיטה הנקראת time-slotted channel hopping, שבה כל מכשיר פועל על לוח זמנים מדויק ומשנה באופן סדיר ערוצי רדיו. זו עובדת היטב כשהמכונות והחיישנים נשארים במקום, שכן היא מקטינה הפרעות וחוסכת סוללה. כשהרובוטים, הרחפנים או כלי הרכב הנעים נכנסים לתמונה, מפת הרשת משתנה. קישורים נופלים ונכבים, מכשירים צריכים להצטרף מחדש לרשת לעתים קרובות, ותזמונים שתוכננו בקפידה כבר לא תואמים את המציאות — מה שיוצר נקודות עיוורון, עיכובים ובזבוז אנרגיה נוסף.
שילוב חיישנים קבועים עם עוזרים נודדים
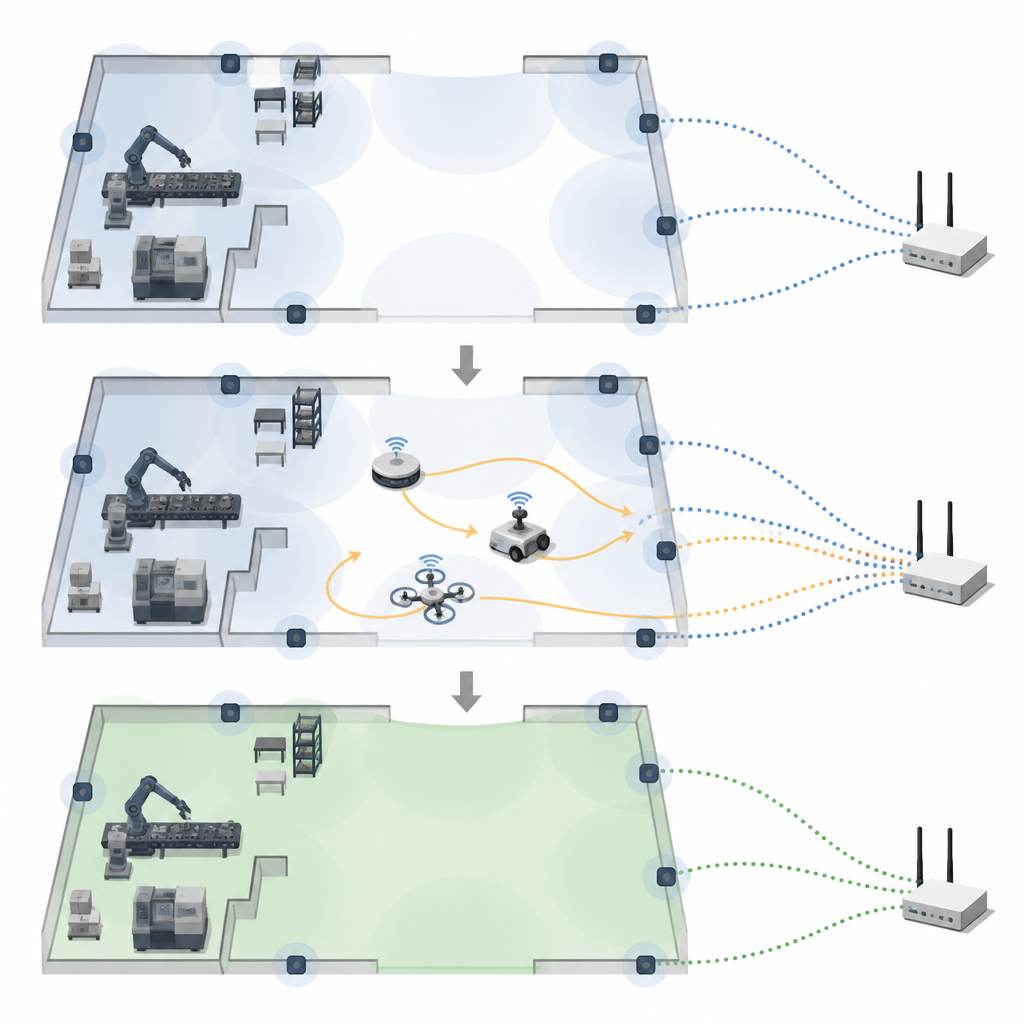
המחברים מציעים פריסה היברידית המשלבת חיישנים סטטיים המותקנים לאורך שפת אזור המפעל עם עוזרים ניידים כגון רובוטים הנעים במסדרונות פנימיים. הצמתים הקבועים מספקים חיבור גב חזק לתקשורת, בעוד הצמתים הניידים סורקים אזורים שלא מכוסים, ממלאים חללים בחישה ומובילים נתונים לעמדת איסוף מרכזית. במקום למקם מכשירים באופן ידני, המערכת משתמשת בתכנון מתמטי כדי להחליט היכן למקם כל חיישן קבוע וכיצד הצמתים הניידים צריכים לנוע לאורך זמן, כך שרוב השטח ייכסה מבלי להציף את המפעל בציוד.
תכנון מסלולים וזמני שידור יחד
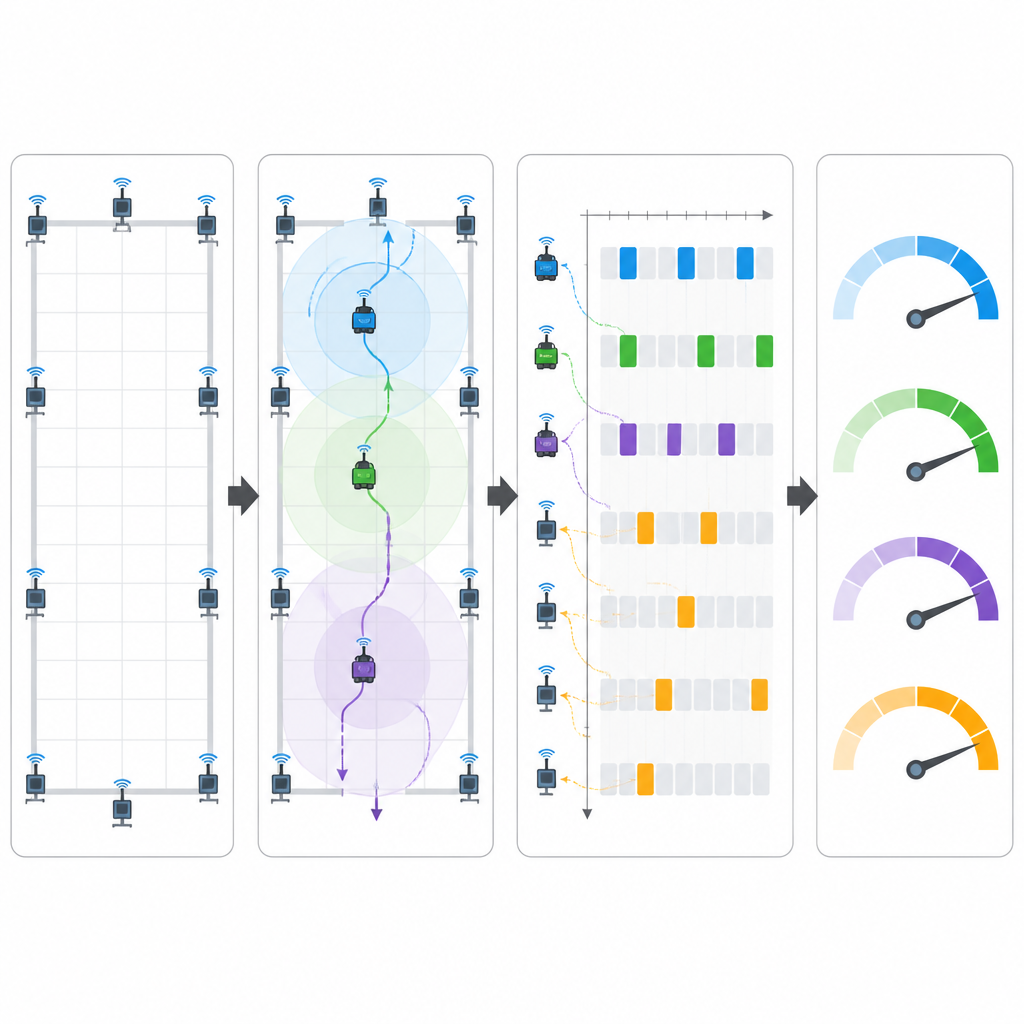
במרכז הגישה, שנקראת MoC-TSCH, עומד מנוע אופטימיזציה ששוקל שלושה מטרות במקביל: עד כמה האזור מכוסה, עד כמה איכות הקישורים טובה, ומה עלות התנועה של הצמתים הניידים. על ידי כוונון משקלים פשוטים, מפעיל יכול להעדיף כיסוי רחב יותר, פחות תנועות רובוט או איכות קישור טובה יותר. המסגרת הזו גם מנווטת את הקצאת זמני השידור והערוצים ברדיו, ומגיבה לשינויים ככל שהרובוטים נעים. בסימולציות ממוחשבות, תכנון משותף זה מעלה את הכיסוי מכ־40 אחוז לכ־88 אחוז ומעלה, מקצר את הזמן שבו צמתים חדשים צריכים כדי להצטרף לרשת, מקטין את העיכוב הממוצע של הודעות מ־128 ל־89 מילישניות ומצמצם את צריכת האנרגיה של הרדיו בכ־40 אחוז.
מסימולציה לרובוטים אמיתיים
כדי לבדוק כיצד הרעיון עובד מעבר לדגמי תוכנה, הצוות בנה סביבת ניסוי פנימית. לוחות חיישנים בלוטות׳ קטנים הוצבו סביב מעבדה ושלחו נתונים למחשב Raspberry Pi על רובוט נייד מסוג TurtleBot. הרובוט נשא צומת רדיו תעשייתי שהעביר מידע על רשת מותאמת לוח זמנים אל צומת שורש קבוע. מאחר שהחישובים האופטימיזיים כבדים עבור מעבדים זעירים, המסלולים והמיקומים חושבו מראש ואוחסנו בקושחה. אפילו עם מגבלה זו ובעיכובים נוספים עקב העברת בלוטות׳, המערכת השיגה אמינות גבוהה מעל 93 אחוז ועיכוב נמוך יותר מאשר פריסה סטנדרטית מבוססת time-slotted, מה שהשיקף במגמות שנראו בסימולציה.
מה משמעות הדבר עבור מפעלים עתידיים
במילים פשוטות, המחקר מראה שטיפול במיקום, בתנועה ובתזמון הרדיו כבעיה עיצובית משולבת אחת יכול להפוך רשתות אלחוטיות במפעל לשלמות ותגובתיות יותר, בלי להסתמך רק על הוספת חומרה. MoC-TSCH מתאם היכן החיישנים יושבים, כיצד הרובוטים נעים ומתי כל מכשיר משדר כך שמכונות יקבלו נתונים טריים יותר עם פחות הודעות שנאבדות וצריכת סוללה מופחתת. בעוד העבודה הנוכחית מתמקדת בסידורי פנים קטנים ובמסלולים שתוכננו מראש, היא מצביעה על אתרים תעשייתיים עתידיים שבהם צי של רובוטים וחיישנים יכול להתאים את תנועותיהם וזמני האוויר יחד כדי לשמור על דגמים דיגיטליים ומערכות בקרה מסונכרנים בקירוב עם העולם הפיזי.
ציטוט: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
מילות מפתח: אינטרנט תעשייתי של הדברים, רשתות חיישנים אלחוטיות, רובוטים ניידים, תזמון רשת, אוטומציה במפעל