Clear Sky Science · tr
MoC-TSCH: ağ kapsama ve bağlantısı için çok amaçlı MILP tabanlı TSCH hareketlilik optimizasyonu IIoT'de
Hareket halindeki daha akıllı fabrika ağları
Modern fabrikalar kablosuz sensörler ve hareketli robotlarla doluyor, ancak tüm bu cihazları hareketteyken bağlı ve zamanında tutmak zor. Bu makale, sabit sensörler ile dolaşan robotların hava dalgalarını nasıl paylaştığını düzenlemenin yeni bir yolunu inceliyor; amaç makinelerin veriyi hızlı, güvenilir ve daha az enerji israfıyla almasını sağlamak.
Bugünün fabrika radyolarının neden zorlandığı
Birçok endüstriyel sensör, her cihazın hassas bir zaman çizelgesini takip ettiği ve düzenli olarak radyo kanallarını değiştirdiği zaman aralıklı kanal atlaması (time-slotted channel hopping) yöntemini kullanır. Cihazlar sabit kaldığında bu yöntem paraziti azaltır ve pil tasarrufu sağlar. Ancak robotlar, dronlar veya hareketli araçlar sahneye girince ağ haritası sürekli değişir. Bağlantılar kopar, cihazlar ağı tekrar tekrar yeniden katılmak zorunda kalır ve dikkatle planlanmış zamanlamalar gerçeğe uymadığı için kör noktalar, gecikmeler ve ekstra enerji tüketimi ortaya çıkar.
Sabit sensörleri dolaşan yardımcılarla karıştırmak
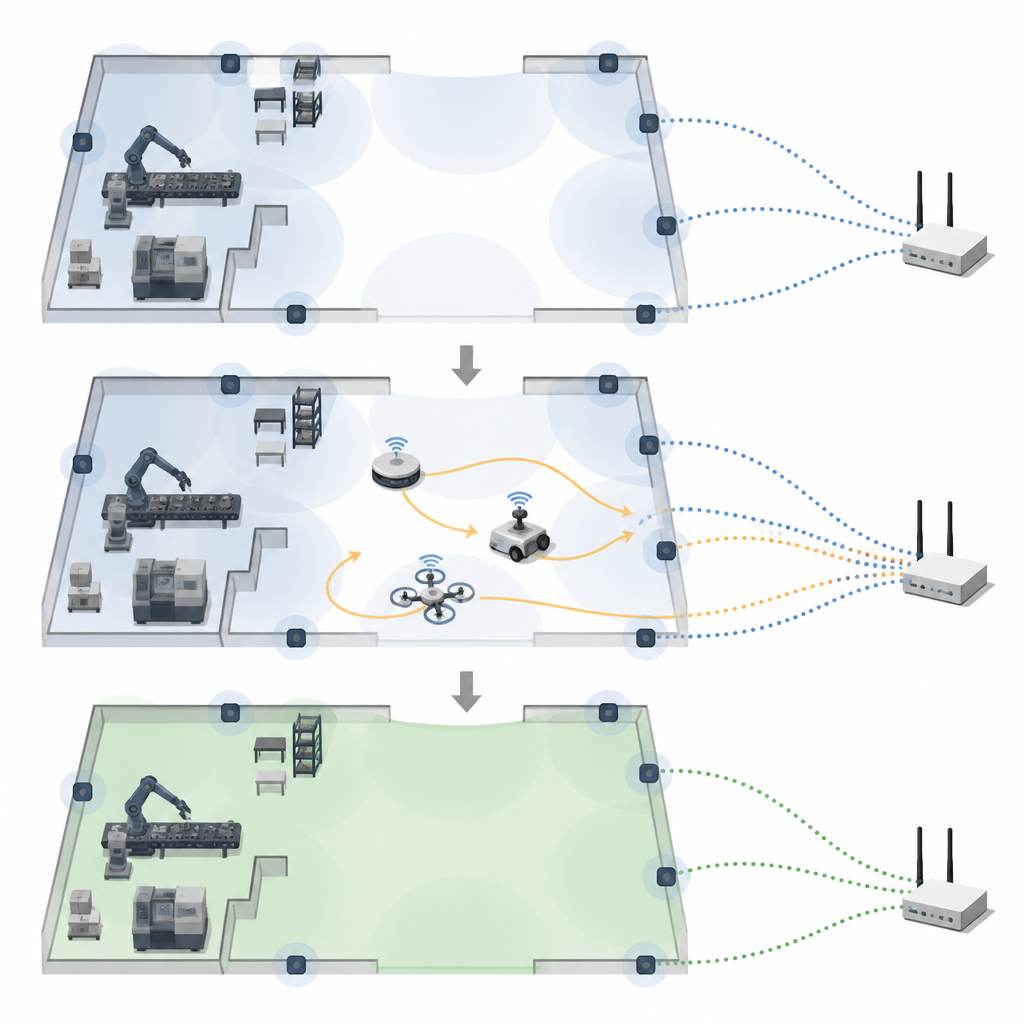
Yazarlar, fabrikanın kenarlarına monte edilmiş sabit sensörleri iç koridorlarda hareket eden robotlar gibi mobil yardımcılarla birleştiren hibrit bir düzen önermektedir. Sabit düğümler iletişim için istikrarlı bir omurga sağlar, mobil düğümler ise kapsanmayan bölgeleri devriye gezer, algılama boşluklarını doldurur ve veriyi merkezi bir toplayıcıya taşır. Cihazları elle yerleştirmek yerine sistem, sabit sensörlerin nerelere konacağı ve mobil düğümlerin zaman içinde nasıl hareket edeceği konusunda matematiksel planlama kullanır; böylece alanın çoğu donanımı aşırıya kaçmadan gözlemlenir.
Yol ve hava zamanı planlamasını birlikte yapmak
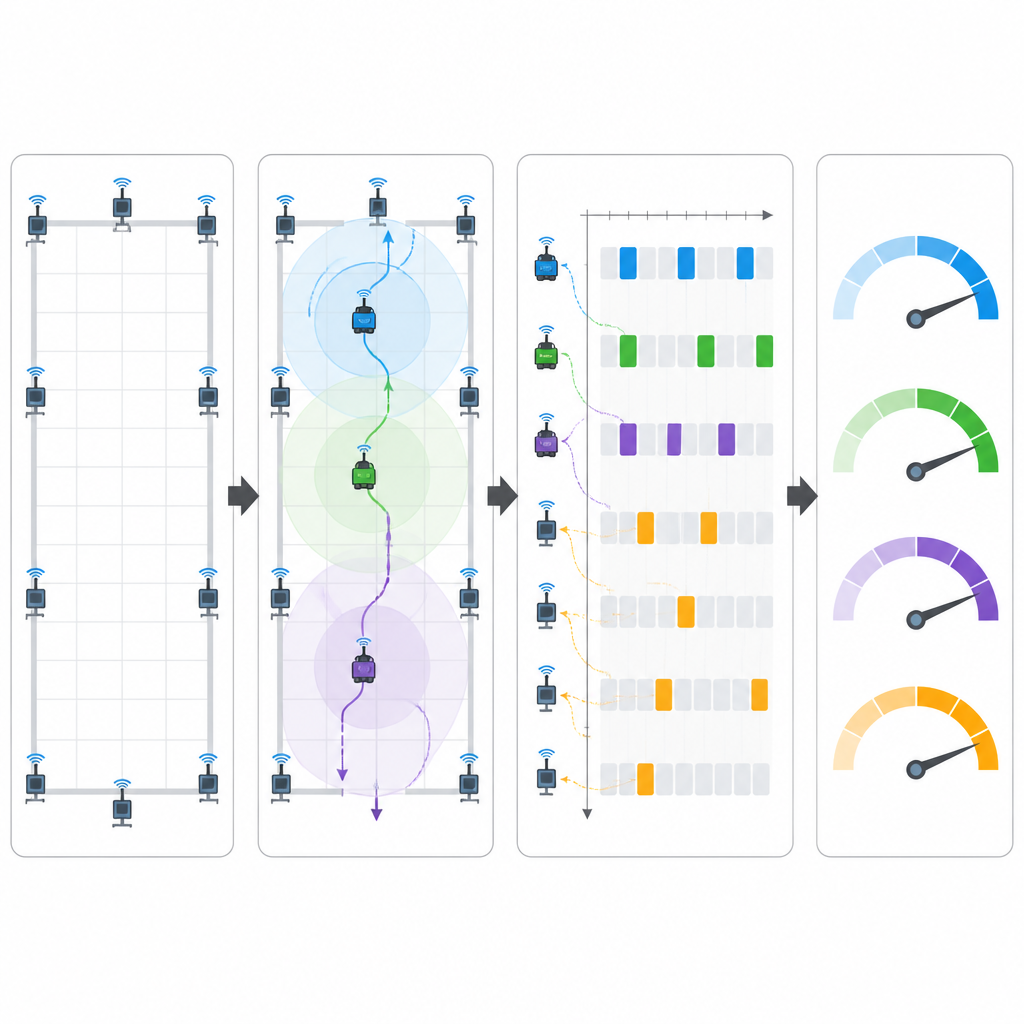
MoC-TSCH adlı yaklaşımın merkezinde, aynı anda üç hedefi tartan bir optimizasyon motoru vardır: alanın ne kadar iyi kapsandığı, iletişim bağlantılarının kalitesi ve mobil düğümlerin hareket maliyeti. Basit ağırlıklar ayarlanarak operatör daha geniş kapsama, daha az robot hareketi veya daha iyi bağlantı kalitesini tercih edebilir. Aynı çerçeve, robotlar hareket ettikçe radyo zaman dilimlerinin ve kanalların nasıl atandığını da yönlendirir. Bilgisayar simülasyonlarında bu ortak planlama kapsama oranını yaklaşık %40'tan %88'in üzerine çıkarıyor, yeni düğümlerin ağa katılma süresini kısaltıyor, mesajların ortalama gecikmesini 128 milisaniyeden 89 milisaniyeye düşürüyor ve radyo enerji kullanımını yaklaşık %40 azaltıyor.
Simülasyondan gerçek robotlara
Fikrin yazılım modellerinin ötesinde nasıl çalıştığını görmek için ekip bir iç mekân test düzeneği kurdu. Küçük Bluetooth sensör kartları bir laboratuvarın çevresine yerleştirildi ve veriyi TurtleBot hareketli bir robot üzerindeki Raspberry Pi bilgisayara gönderdi. Robot, zaman aralıklı bir ağ üzerinden bilgiyi sabit bir kök düğüme ileten endüstriyel bir radyo düğümü taşıdı. Optimizasyon hesaplamaları küçük işlemciler için ağır olduğundan rotalar ve yerleşimler çevrimdışı olarak hesaplanıp ardından ürün yazılımına yüklendi. Bu kısıt ve Bluetooth ile yönlendirmenin eklediği gecikmelere rağmen sistem yine de %93'ün üzerinde yüksek güvenilirlik ve standart bir zaman aralıklı kurulumdan daha düşük gecikme sağladı; bu eğilimler simülasyonla da uyumluydu.
Geleceğin fabrikaları için ne anlama geliyor
Daha basit ifadeyle çalışma, yerleştirmeyi, hareketi ve radyo zamanlamasını tek bir birleşik tasarım problemi olarak ele almanın kablosuz fabrika ağlarını hem daha eksiksiz hem de daha duyarlı kılabileceğini gösteriyor; bunun için basitçe daha fazla donanım eklemeye gerek yok. MoC-TSCH, sensörlerin nerede durduğunu, robotların nasıl hareket ettiğini ve her cihazın ne zaman konuştuğunu koordine ederek makinelerin daha güncel veriler almasını, daha az mesaj kaybı ve azalan pil tüketimi ile sağlamayı amaçlar. Mevcut çalışma küçük iç mekan düzenleri ve önceden planlanmış yollar üzerinde yoğunlaşsa da bu, sensör ve robot filosunun hareketlerini ve hava zamanını birlikte uyarlayarak dijital kopyalar ve kontrol sistemlerinin fiziksel dünya ile yakından senkron kalacağı gelecekteki endüstriyel alanlara işaret eder.
Atıf: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Anahtar kelimeler: endüstriyel nesnelerin interneti, kablosuz sensör ağları, hareketli robotlar, ağ zamanlaması, fabrika otomasyonu