Clear Sky Science · pt
MoC-TSCH: otimização de mobilidade TSCH baseada em MILP multiobjetivo para cobertura e conectividade de rede na IIoT
Redes de fábrica mais inteligentes em movimento
Fábricas modernas estão se enchendo de sensores sem fio e robôs móveis, mas manter todos esses dispositivos conectados e com comunicação em tempo hábil é difícil quando tudo está em movimento. Este artigo explora uma nova forma de coreografar como sensores fixos e robôs em deslocamento compartilham o espectro, para que as máquinas recebam dados de forma rápida, confiável e com menos desperdício de energia.
Por que os rádios de fábrica atuais enfrentam dificuldades
Muitos sensores industriais usam um método chamado time-slotted channel hopping, em que cada dispositivo segue um cronograma preciso e muda regularmente os canais de rádio. Isso funciona bem quando máquinas e sensores permanecem estáticos, pois reduz interferência e economiza bateria. Quando robôs, drones ou veículos em movimento entram em cena, o mapa da rede passa a mudar constantemente. Links caem e surgem, dispositivos precisam reaparecer na rede repetidamente, e horários cuidadosamente planejados deixam de corresponder à realidade, gerando pontos cegos, atrasos e maior consumo de energia.
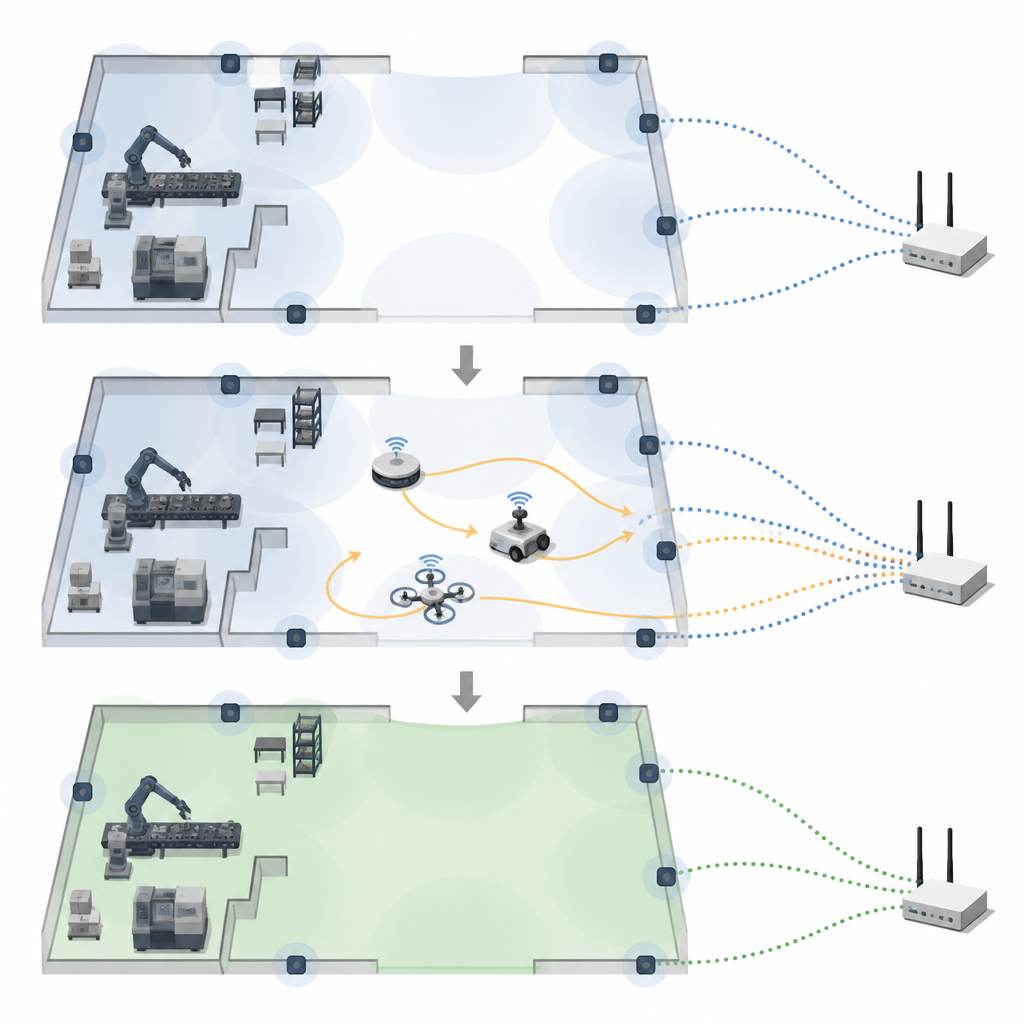
Misturando sensores fixos com auxiliares em patrulha
Os autores propõem uma configuração híbrida que combina sensores estáticos montados nas bordas de uma área fabril com auxiliares móveis, como robôs que se deslocam pelos corredores internos. Nós fixos fornecem uma espinha dorsal estável para a comunicação, enquanto nós móveis patrulham regiões descobertas, preenchem lacunas de sensoriamento e transportam dados em direção a um coletor central. Em vez de posicionar dispositivos manualmente, o sistema usa planejamento matemático para decidir onde colocar cada sensor estático e como os nós móveis devem se mover ao longo do tempo, de modo que a maior parte do espaço seja observada sem encher o chão de fábrica com hardware.
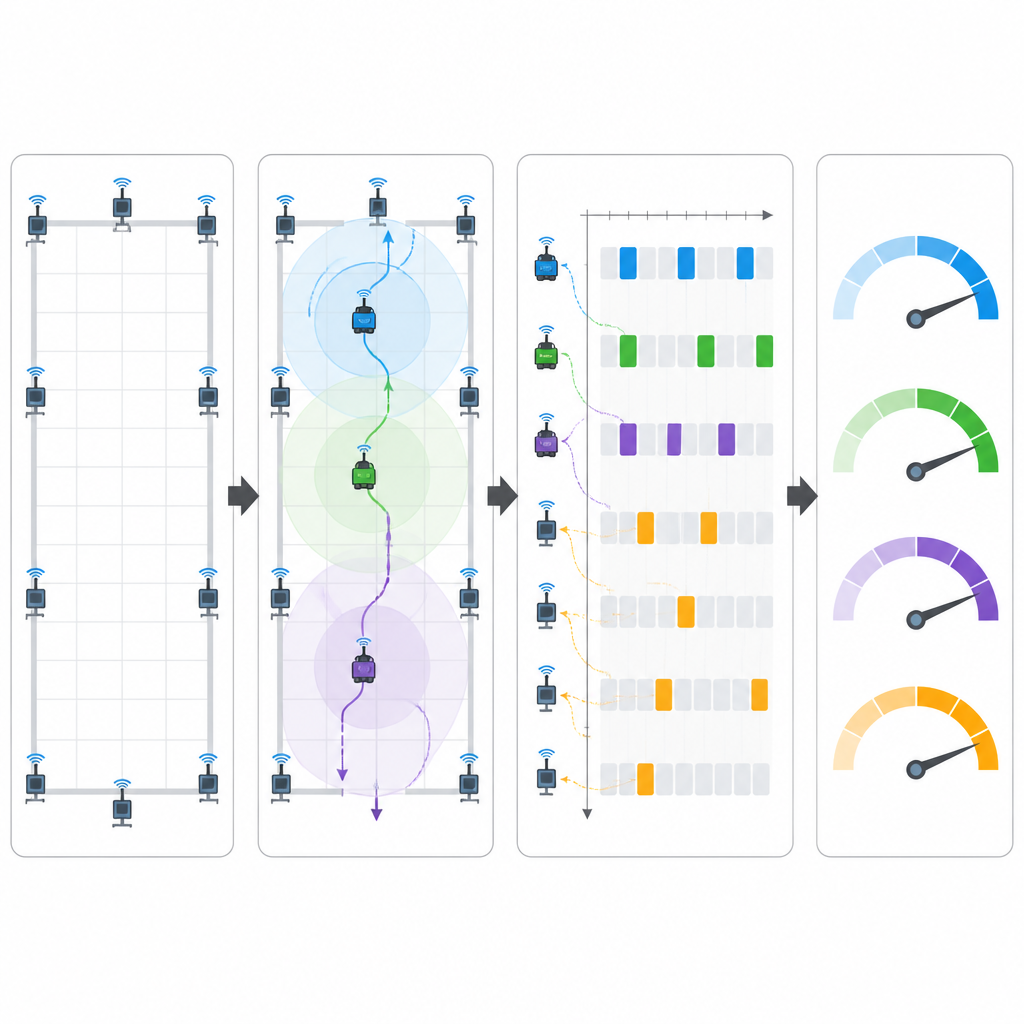
Planejando trajetórias e tempo de ar juntos
No cerne da abordagem, chamada MoC-TSCH, está um motor de otimização que pondera três objetivos simultaneamente: quão bem a área é coberta, quão boas são as ligações de comunicação e qual o custo de movimento dos nós móveis. Ajustando pesos simples, um operador pode priorizar maior cobertura, menos deslocamento dos robôs ou melhor qualidade de link. O mesmo arcabouço também orienta como intervalos de tempo e canais de rádio são atribuídos, reagindo às mudanças conforme os robôs se movem. Em simulações por computador, esse planejamento conjunto eleva a cobertura de cerca de 40% para mais de 88%, reduz o tempo que novos nós levam para ingressar na rede, diminui o atraso médio das mensagens de 128 para 89 milissegundos e reduz o consumo de energia do rádio em cerca de 40%.
Da simulação para robôs reais
Para verificar o funcionamento da ideia além de modelos de software, a equipe construiu um banco de testes interno. Pequenas placas de sensores Bluetooth foram colocadas em um laboratório, enviando dados para um computador Raspberry Pi em um robô móvel TurtleBot. O robô carregava um nó de rádio industrial que retransmitia informações por uma rede com time-slotted para um nó raiz fixo. Como a matemática de otimização é pesada para processadores diminutos, as rotas e posicionamentos foram calculados off-line e então carregados no firmware. Mesmo com essa limitação e atrasos adicionais do encaminhamento por Bluetooth, o sistema ainda alcançou alta confiabilidade acima de 93% e menor atraso do que uma configuração time-slotted padrão, refletindo as tendências observadas na simulação.
O que isso significa para fábricas futuras
Em termos simples, o estudo mostra que tratar posicionamento, movimento e agendamento de rádio como um único problema de desenho combinado pode tornar as redes sem fio fabris tanto mais completas quanto mais responsivas, sem simplesmente adicionar mais hardware. O MoC-TSCH coordena onde os sensores ficam, como os robôs se movem e quando cada dispositivo transmite, de modo que as máquinas recebam dados mais atualizados com menos mensagens perdidas e menor consumo de bateria. Embora o trabalho atual foque em ambientes internos pequenos e trajetórias pré-planejadas, ele aponta para futuros locais industriais em que frotas de robôs e sensores possam adaptar seus movimentos e tempos de transmissão em conjunto para manter réplicas digitais e sistemas de controle estreitamente sincronizados com o mundo físico.
Citação: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Palavras-chave: internet industrial das coisas, redes de sensores sem fio, robôs móveis, agendamento de rede, automação de fábrica