Clear Sky Science · fr
MoC-TSCH : optimisation de la mobilité TSCH multi-objectifs basée sur MILP pour la couverture et la connectivité réseau en IIoT
Des réseaux d'usine plus intelligents en mouvement
Les usines modernes se remplissent de capteurs sans fil et de robots mobiles, mais garder tous ces appareils connectés et fournir des données en temps utile devient difficile lorsque tout est en mouvement. Cet article explore une nouvelle manière de coordonner la façon dont capteurs fixes et robots itinérants partagent le spectre, afin que les machines reçoivent des données rapidement, de façon fiable et avec moins de gaspillage d'énergie.
Pourquoi les radios d'usine d'aujourd'hui peinent
Beaucoup de capteurs industriels utilisent une méthode appelée time-slotted channel hopping, où chaque appareil suit un calendrier précis et change régulièrement de canal radio. Cela fonctionne bien quand machines et capteurs restent immobiles, car cela réduit les interférences et économise la batterie. Dès que des robots, drones ou véhicules en mouvement entrent en jeu, la carte réseau évolue sans cesse. Les liaisons se dégradent ou se coupent, les appareils doivent se ré-joindre au réseau à répétition, et des plannings soigneusement établis ne correspondent plus à la réalité, entraînant des zones d'ombre, des délais et une consommation d'énergie supplémentaire.
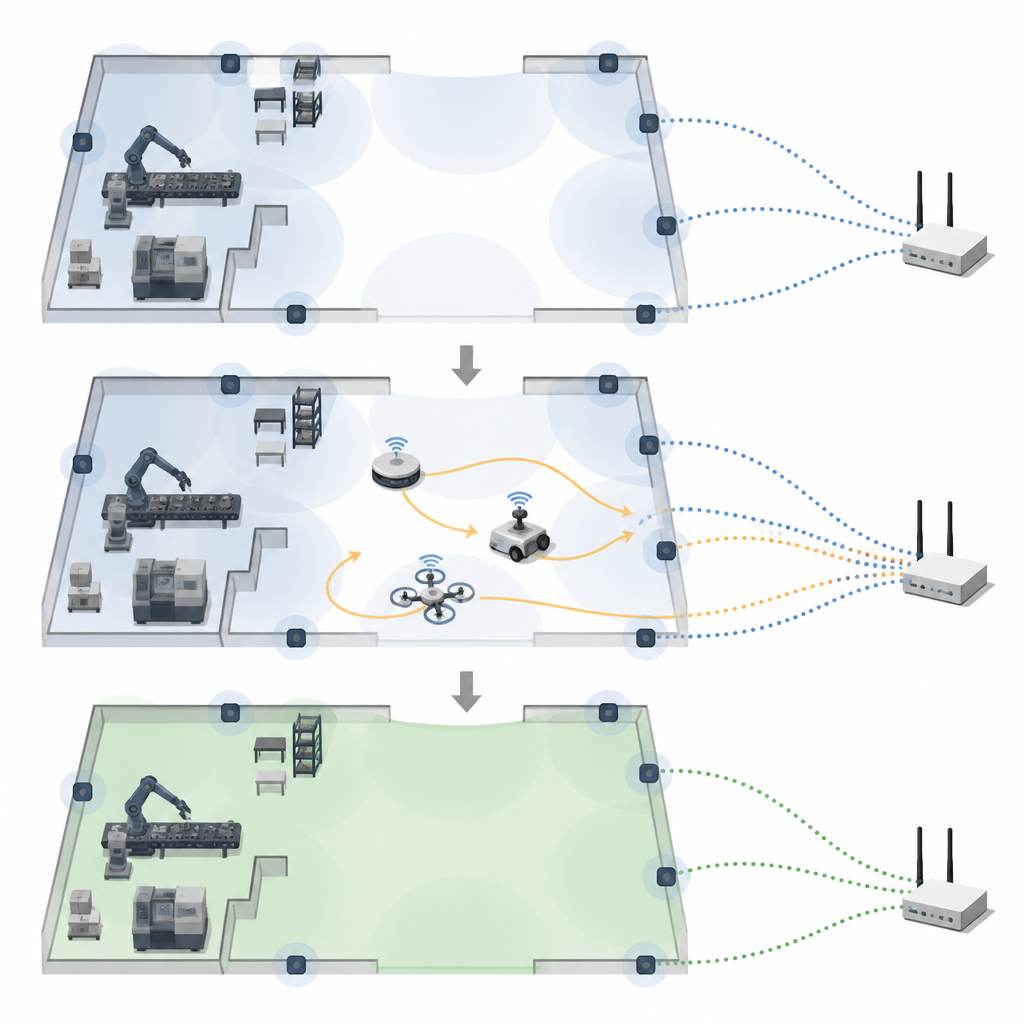
Mélanger capteurs fixes et auxiliaires itinérants
Les auteurs proposent une configuration hybride qui combine des capteurs statiques installés le long des bords d'une zone d'usine avec des auxiliaires mobiles tels que des robots se déplaçant dans les couloirs intérieurs. Les nœuds fixes fournissent une colonne vertébrale de communication stable, tandis que les nœuds mobiles patrouillent les zones non couvertes, comblent les lacunes de détection et acheminent les données vers un puits central. Plutôt que de placer les appareils à la main, le système utilise une planification mathématique pour décider où positionner chaque capteur fixe et comment les nœuds mobiles doivent se déplacer dans le temps afin que la plus grande partie possible de l'espace soit observée sans inonder le sol d'équipement.
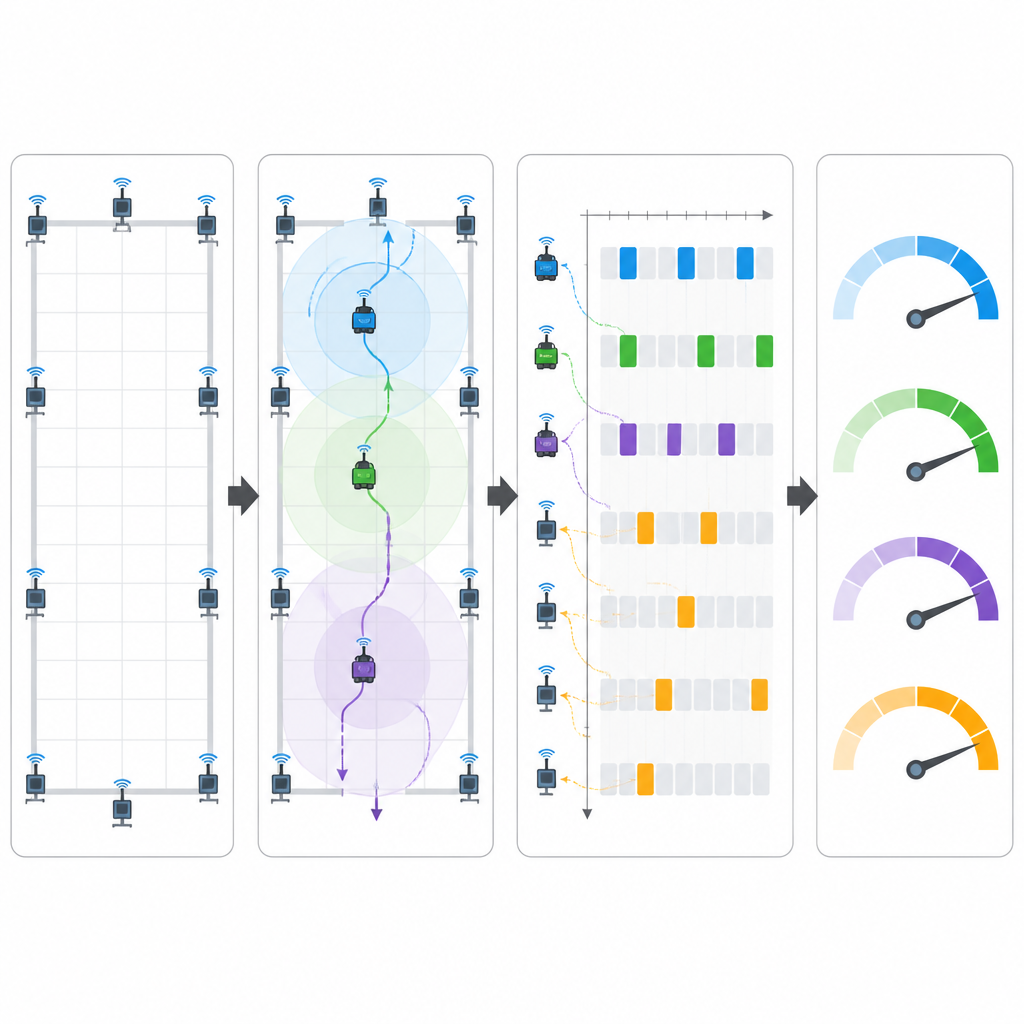
Planifier trajectoires et temps d'antenne ensemble
Au cœur de l'approche, appelée MoC-TSCH, se trouve un moteur d'optimisation qui pèse trois objectifs simultanément : la qualité de la couverture de la zone, la qualité des liaisons de communication et le coût lié aux déplacements des nœuds mobiles. En ajustant des poids simples, un opérateur peut privilégier une couverture plus large, moins de déplacements de robots ou une meilleure qualité de liaison. Le même cadre oriente aussi l'attribution des créneaux temporels et des canaux radio, en réagissant aux changements au fur et à mesure que les robots bougent. Dans des simulations informatiques, cette planification conjointe augmente la couverture d'environ 40 % à plus de 88 %, réduit le temps nécessaire pour que de nouveaux nœuds rejoignent le réseau, diminue le délai moyen des messages de 128 à 89 millisecondes et réduit la consommation radio d'environ 40 %.
De la simulation aux robots réels
Pour tester l'idée au-delà des modèles logiciels, l'équipe a construit un banc d'essai en intérieur. De petites cartes capteurs Bluetooth ont été placées autour d'un laboratoire, envoyant des données vers un ordinateur Raspberry Pi monté sur un robot mobile TurtleBot. Le robot portait un nœud radio industriel qui relayait l'information via un réseau à créneaux temporels vers un nœud racine fixe. Parce que les calculs d'optimisation sont lourds pour de faibles processeurs, les itinéraires et les emplacements ont été calculés hors ligne puis chargés dans le firmware. Même avec cette contrainte et les délais additionnels dus au relais Bluetooth, le système a atteint une forte fiabilité supérieure à 93 % et un délai inférieur à une configuration time-slotted standard, reflétant les tendances observées en simulation.
Ce que cela signifie pour les usines de demain
Concrètement, l'étude montre que traiter le placement, le mouvement et l'ordonnancement radio comme un seul problème de conception peut rendre les réseaux sans fil industriels à la fois plus complets et plus réactifs, sans se contenter d'ajouter davantage de matériel. MoC-TSCH coordonne l'emplacement des capteurs, les déplacements des robots et les moments de transmissions pour que les machines reçoivent des données plus récentes avec moins de messages perdus et une consommation de batterie réduite. Bien que le travail actuel se concentre sur de petits agencements intérieurs et des trajectoires préplanifiées, il ouvre la voie à des sites industriels futurs où des flottes de robots et de capteurs pourront adapter leurs mouvements et leurs créneaux aériens de concert pour maintenir des répliques numériques et des systèmes de contrôle étroitement synchronisés avec le monde physique.
Citation: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Mots-clés: internet industriel des objets, réseaux de capteurs sans fil, robots mobiles, ordonnancement réseau, automatisation d'usine