Clear Sky Science · de
MoC-TSCH: multi-objektive MILP-basierte TSCH-Mobilitätsoptimierung für Netzabdeckung und Konnektivität im IIoT
Intelligentere Fabriknetzwerke in Bewegung
Moderne Fabriken füllen sich mit drahtlosen Sensoren und mobilen Robotern, doch alle diese Geräte verbunden und zeitgerecht zu halten ist schwierig, wenn sich alles bewegt. Dieses Papier untersucht einen neuen Ansatz, um zu orchestrieren, wie feste Sensoren und umherfahrende Roboter die Funkkanäle teilen, sodass Maschinen Daten schnell, zuverlässig und mit geringerem Energieverbrauch erhalten.
Warum heutige Fabrikfunktechnik Probleme hat
Viele industrielle Sensoren nutzen ein Verfahren namens Time-Slotted Channel Hopping, bei dem jedes Gerät einem präzisen Zeitplan folgt und regelmäßig die Funkkanäle wechselt. Das funktioniert gut, wenn Maschinen und Sensoren stationär sind, denn es reduziert Störungen und spart Batterie. Sobald Roboter, Drohnen oder fahrende Fahrzeuge hinzukommen, ändert sich die Netzwerktopologie ständig. Verbindungen brechen auf und ab, Geräte müssen sich wiederholt neu ins Netzwerk einreihen, und sorgfältig geplante Zeitpläne passen nicht mehr zur Realität, was zu Funklöchern, Verzögerungen und zusätzlichem Energieverbrauch führt.
Kombination aus festen Sensoren und mobilen Helfern
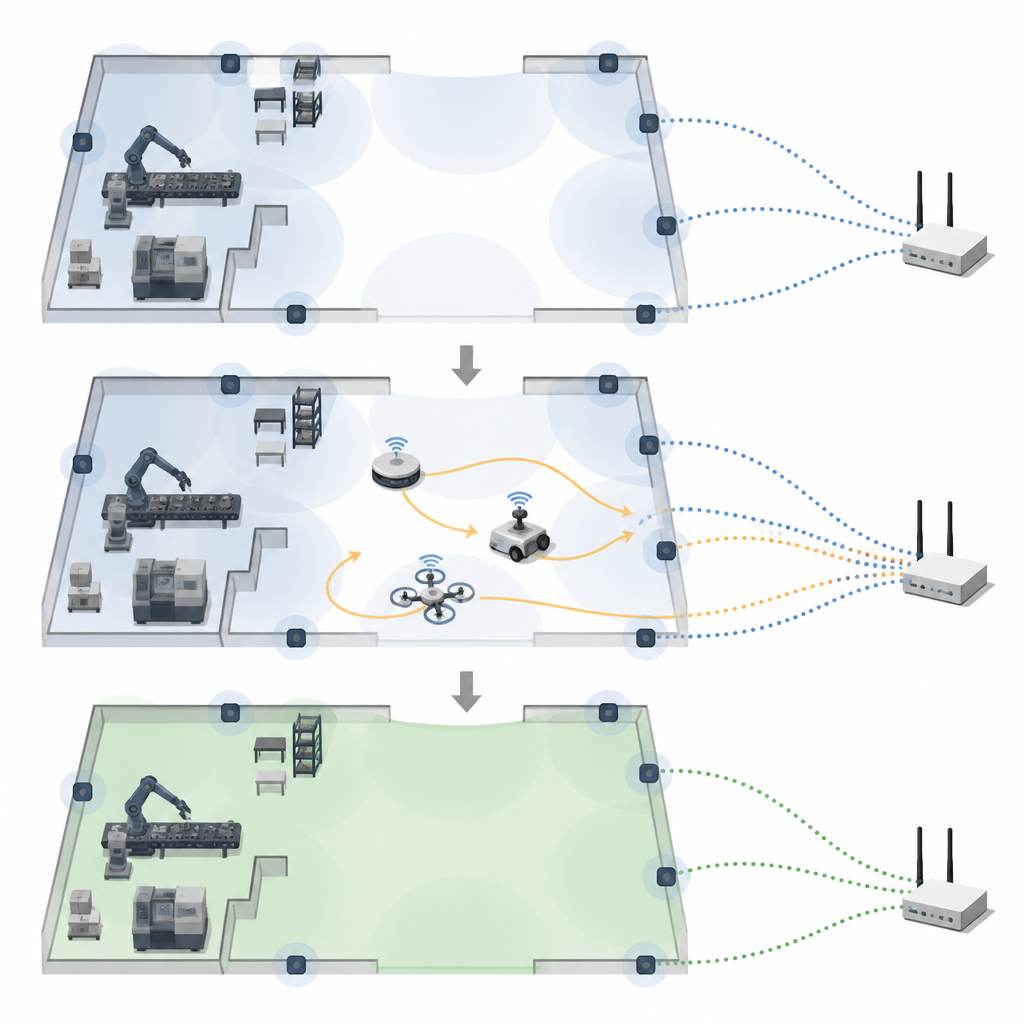
Die Autoren schlagen ein hybrides Layout vor, das statische Sensoren entlang der Ränder eines Fabrikbereichs mit mobilen Helfern wie Robotern kombiniert, die durch innere Gänge fahren. Feste Knoten bieten ein stabiles Rückgrat für die Kommunikation, während mobile Knoten unbedeckte Regionen patrouillieren, Lücken in der Erfassung schließen und Daten zum zentralen Sink bringen. Anstatt Geräte per Hand zu platzieren, verwendet das System mathematische Planung, um zu entscheiden, wo jeder statische Sensor stehen soll und wie sich mobile Knoten über die Zeit bewegen sollten, damit der größte Teil des Raums beobachtet wird, ohne die Halle mit Hardware zu überfrachten.
Wegeplanung und Sendezeiten zusammen gestalten
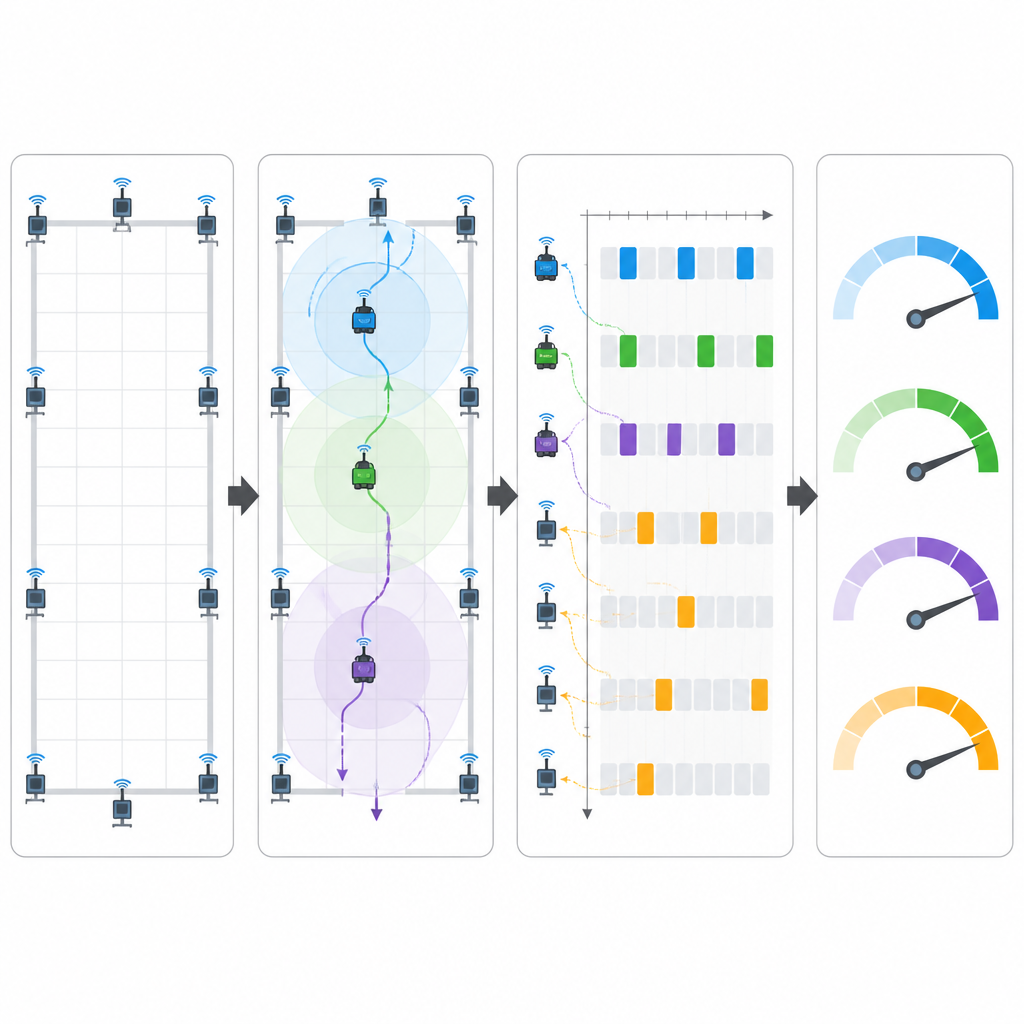
Im Kern des Ansatzes, genannt MoC-TSCH, steht eine Optimierungsmaschine, die drei Ziele gleichzeitig abwägt: wie gut die Fläche abgedeckt ist, wie gut die Kommunikationsverbindungen sind und wie teuer die Bewegung mobiler Knoten ist. Durch Anpassung einfacher Gewichtungen kann ein Betreiber breitere Abdeckung, weniger Roboterbewegungen oder bessere Verbindungsqualität priorisieren. Dasselbe Rahmenwerk steuert auch die Zuweisung von Funk-Zeitschlitzen und Kanälen und reagiert auf Veränderungen, während sich die Roboter bewegen. In Computersimulationen erhöht diese gemeinsame Planung die Abdeckung von etwa 40 Prozent auf über 88 Prozent, verkürzt die Zeit, die neue Knoten zum Einbinden benötigen, reduziert die durchschnittliche Nachrichtenlatenz von 128 auf 89 Millisekunden und senkt den Funkenergieverbrauch um etwa 40 Prozent.
Von der Simulation zu realen Robotern
Um zu prüfen, wie die Idee über Softwaremodelle hinaus funktioniert, baute das Team ein Indoor-Testfeld auf. Kleine Bluetooth-Sensorboards wurden in einem Labor verteilt und sendeten Daten an einen Raspberry Pi auf einem TurtleBot-Mobilroboter. Der Roboter trug einen industriellen Funkknoten, der Informationen über ein zeitgetaktetes Netzwerk an einen festen Root-Knoten weiterleitete. Da die Optimierungsrechnung für winzige Prozessoren zu aufwändig ist, wurden Routen und Platzierungen offline berechnet und dann in die Firmware geladen. Selbst mit dieser Einschränkung und zusätzlichen Verzögerungen durch Bluetooth-Weiterleitung erreichte das System weiterhin hohe Zuverlässigkeit von über 93 Prozent und geringere Latenz als ein standardmäßiges zeitgetaktetes Setup, was die in der Simulation beobachteten Trends widerspiegelt.
Was das für zukünftige Fabriken bedeutet
Vereinfacht gesagt zeigt die Studie, dass die gemeinsame Betrachtung von Platzierung, Bewegung und Funkplanung als ein kombiniertes Entwurfsproblem drahtlose Fabriknetzwerke sowohl vollständiger als auch reaktionsschneller machen kann, ohne einfach mehr Hardware hinzuzufügen. MoC-TSCH koordiniert, wo Sensoren sitzen, wie Roboter sich bewegen und wann jedes Gerät sendet, sodass Maschinen frischere Daten mit weniger verlorenen Nachrichten und reduziertem Batterieverbrauch erhalten. Während die aktuelle Arbeit auf kleine Innenräume und vorgeplante Wege fokussiert ist, weist sie auf künftige Industrieanlagen hin, in denen Flotten von Robotern und Sensoren ihre Bewegungen und Sendezeiten gemeinsam anpassen können, um digitale Abbilder und Steuerungssysteme eng mit der physischen Welt in Einklang zu halten.
Zitation: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Schlüsselwörter: industrielles internet der dinge, drahtlose sensornetzwerke, mobile roboter, netzwerk-scheduling, fabrikautomation