Clear Sky Science · nl
MoC-TSCH: multi-objectieve MILP-gebaseerde TSCH-mobiliteitsoptimalisatie voor netwerkdekking en connectiviteit in IIoT
Slimmere netwerken in bewegende fabrieken
Moderne fabrieken lopen vol met draadloze sensoren en mobiele robots, maar het is moeilijk om al die apparaten verbonden en tijdig te houden wanneer alles in beweging is. Dit artikel onderzoekt een nieuwe manier om te choreograferen hoe vaste sensoren en rondzwervende robots de ether delen, zodat machines data snel, betrouwbaar en met minder verspilde energie ontvangen.
Waarom de radio’s van vandaag moeite hebben
Veel industriële sensoren gebruiken een methode genaamd time-slotted channel hopping, waarbij elk apparaat een precies tijdschema volgt en regelmatig van radiokanaal wisselt. Dit werkt goed wanneer machines en sensoren stil blijven staan, omdat het interferentie vermindert en batterij bespaart. Zodra robots, drones of rijdende voertuigen in beeld komen, verandert de netwerktopologie continu. Links vallen weg, apparaten moeten zich herhaaldelijk opnieuw aansluiten en zorgvuldig geplande schema’s komen niet meer overeen met de werkelijkheid, wat leidt tot blinde plekken, vertragingen en extra energieverbruik.
Vaste sensoren mengen met rondzwervende helpers
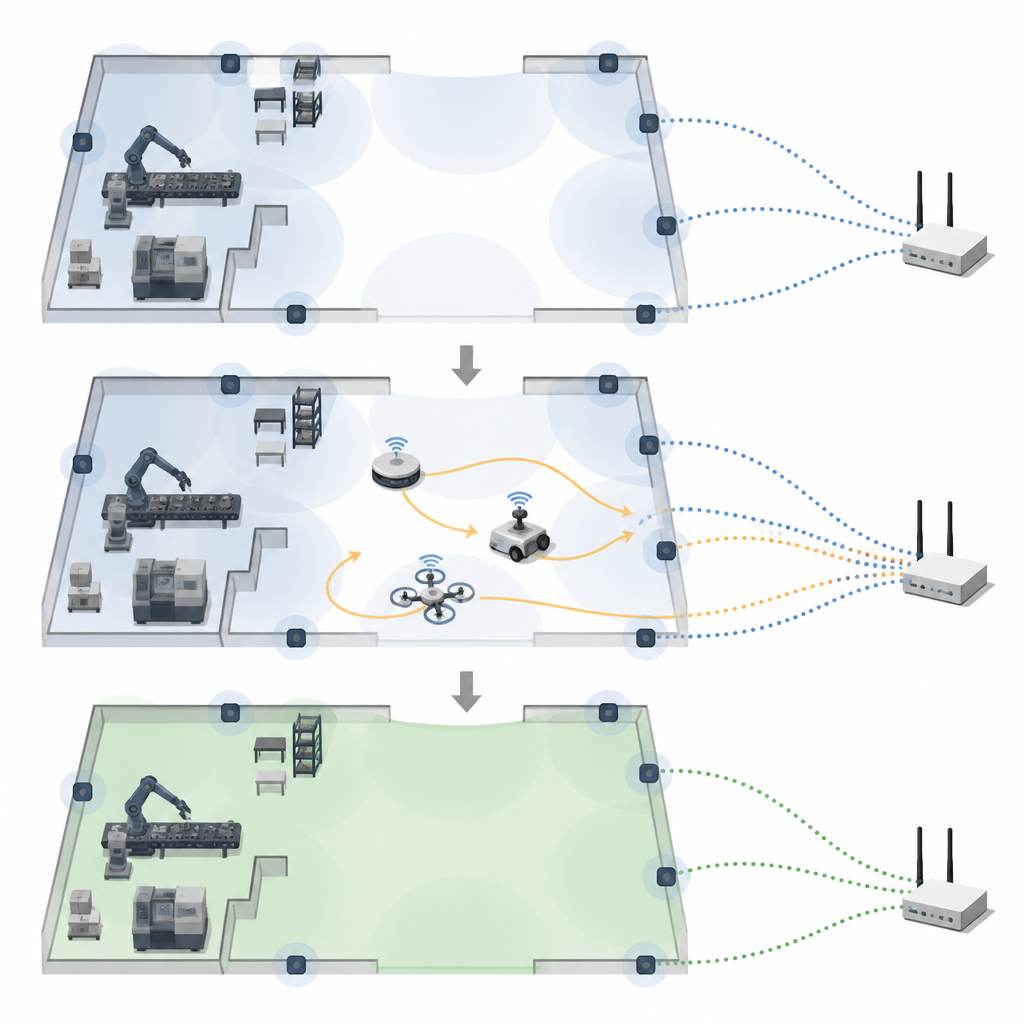
De auteurs stellen een hybride opstelling voor die statische sensoren langs de randen van een fabrieksruimte combineert met mobiele helpers zoals robots die door interne gangen bewegen. Vaste knooppunten bieden een stabiele ruggengraat voor communicatie, terwijl mobiele knooppunten patrouilleren in ongedekte gebieden, hiaten in detectie opvullen en gegevens naar een centraal verzamelpunt vervoeren. In plaats van apparaten handmatig te plaatsen, gebruikt het systeem wiskundige planning om te beslissen waar elk statisch sensor moet staan en hoe mobiele knooppunten zich in de tijd moeten bewegen, zodat het grootste deel van de ruimte wordt bewaakt zonder de vloer te overspoelen met hardware.
Paden en airtime samen plannen
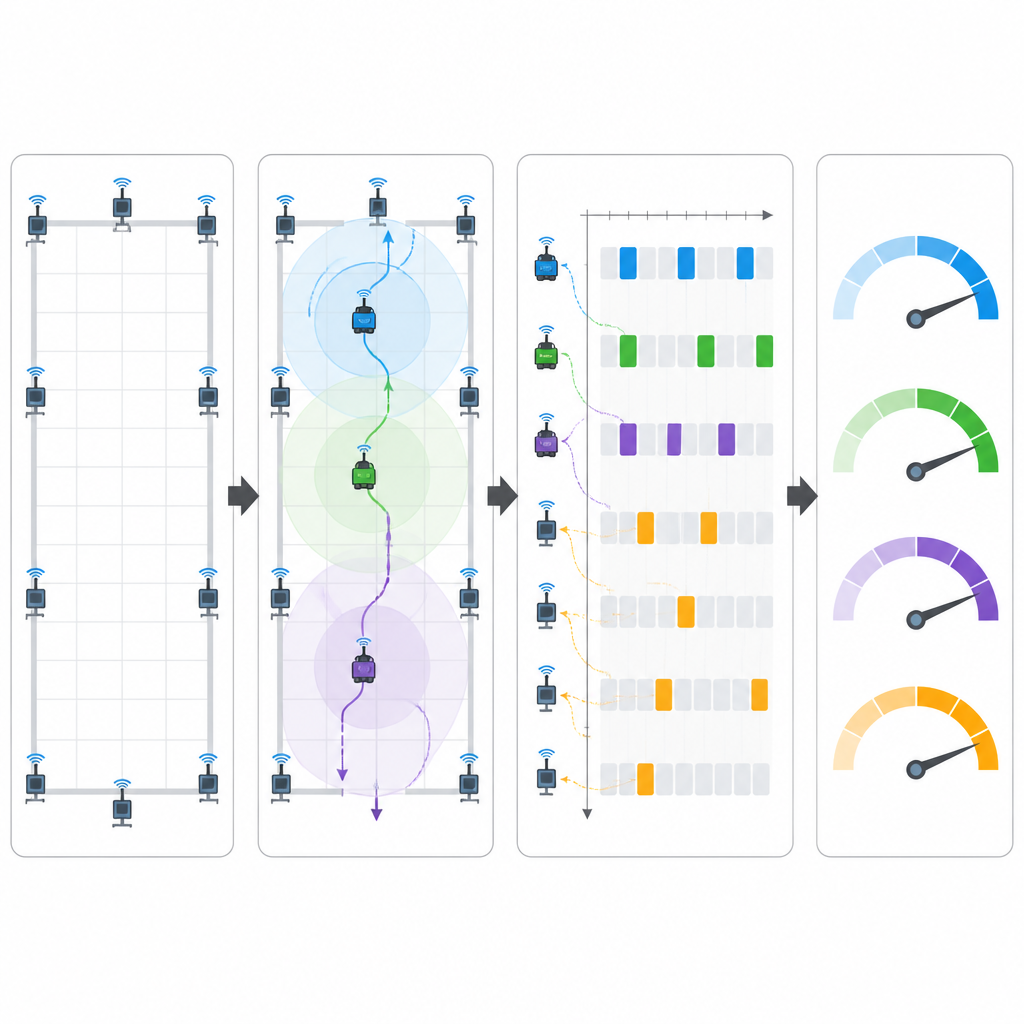
De kern van de aanpak, MoC-TSCH genoemd, is een optimalisatiemotor die drie doelen tegelijk afweegt: hoe goed het gebied wordt gedekt, hoe goed de communicatielinks zijn, en hoe kostbaar het is voor mobiele knooppunten om te bewegen. Door eenvoudige gewichten aan te passen, kan een operator bredere dekking, minder robotbewegingen of betere linkkwaliteit prioriteren. hetzelfde kader stuurt ook hoe radiotijdslots en kanalen worden toegewezen, en reageert op veranderingen naarmate robots bewegen. In computersimulaties verhoogt deze gezamenlijke planning de dekking van ongeveer 40 procent naar meer dan 88 procent, verkort het de tijd die nieuwe knooppunten nodig hebben om zich bij het netwerk aan te sluiten, verlaagt het de gemiddelde vertraging voor berichten van 128 naar 89 milliseconden, en vermindert het radio-energieverbruik met ongeveer 40 procent.
Van simulatie naar echte robots
Om te zien hoe het idee buiten softwaremodellen werkt, bouwde het team een indoor testopstelling. Kleine Bluetooth-sensorborden werden in een lab geplaatst en stuurden data naar een Raspberry Pi-computer op een TurtleBot-mobiele robot. De robot droeg een industrieel radiosknooppunt dat informatie over een tijdgesloten netwerk naar een vast root-knooppunt doorgeefde. Omdat de optimalisatiemath te zwaar is voor kleine processors, werden routes en plaatsingen offline berekend en vervolgens in de firmware geladen. Zelfs met deze beperking en extra vertragingen door Bluetooth-forwarding behaalde het systeem nog steeds een hoge betrouwbaarheid boven 93 procent en een lagere vertraging dan een standaard time-slotted opstelling, waarmee de in de simulaties waargenomen trends werden weerspiegeld.
Wat dit betekent voor toekomstige fabrieken
Simpel gezegd laat de studie zien dat het behandelen van plaatsing, beweging en radioschema als één gecombineerd ontwerpprobleem draadloze fabrieksnetwerken zowel completer als reactiever kan maken, zonder simpelweg meer hardware toe te voegen. MoC-TSCH coördineert waar sensoren staan, hoe robots bewegen en wanneer elk apparaat zendt, zodat machines versere data krijgen met minder verloren berichten en lager batterijverbruik. Hoewel het huidige werk zich richt op kleine binnenruimtes en vooraf geplande paden, wijst het op toekomstige industriële locaties waar fleets van robots en sensoren hun bewegingen en airtime gezamenlijk kunnen aanpassen om digitale replica’s en besturingssystemen nauwkeurig gesynchroniseerd te houden met de fysieke wereld.
Bronvermelding: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Trefwoorden: industrieel internet der dingen, draadloze sensornetwerken, mobiele robots, netwerkplanning, fabrieksautomatisering