Clear Sky Science · es
MoC-TSCH: optimización de movilidad TSCH basada en MILP multiobjetivo para cobertura y conectividad de red en IIoT
Redes fabriles más inteligentes en movimiento
Las fábricas modernas se llenan de sensores inalámbricos y robots móviles, pero mantener todos estos dispositivos conectados y con comunicaciones oportunas es difícil cuando todo está en movimiento. Este artículo explora una nueva forma de coreografiar cómo los sensores fijos y los robots nómadas comparten el espectro, de modo que las máquinas reciban datos rápida y fiablemente, y con menos energía desperdiciada.
Por qué las radios actuales de fábrica lo pasan mal
Muchos sensores industriales usan un método llamado time-slotted channel hopping (TSCH), en el que cada dispositivo sigue un horario preciso y cambia regularmente de canal de radio. Esto funciona bien cuando máquinas y sensores permanecen en su sitio, ya que reduce la interferencia y alarga la vida de la batería. Cuando entran en escena robots, drones o vehículos en movimiento, el mapa de la red cambia continuamente. Los enlaces se pierden y se restablecen, los dispositivos deben volver a incorporarse a la red repetidamente, y los horarios planificados dejan de coincidir con la realidad, lo que provoca zonas ciegas, retrasos y un mayor consumo energético.
Mezclar sensores fijos con ayudantes móviles
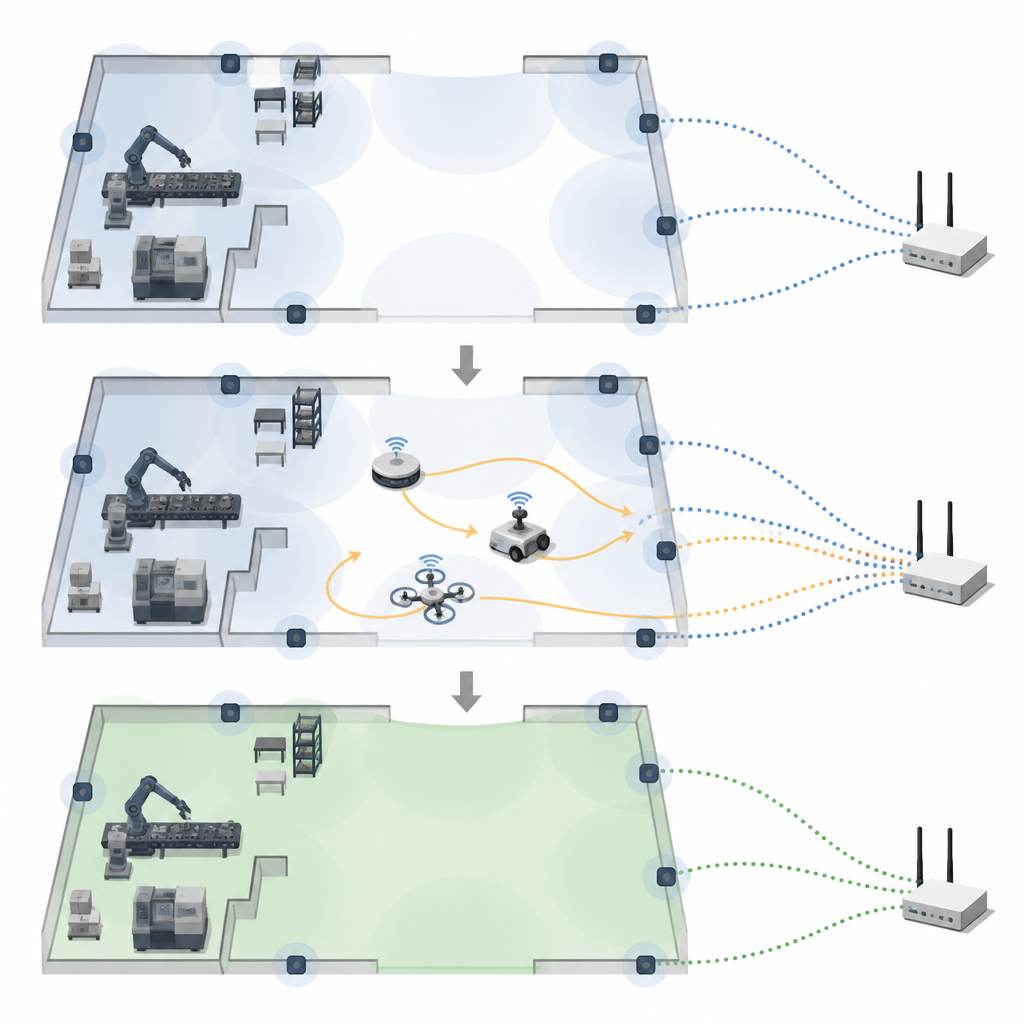
Los autores proponen una disposición híbrida que combina sensores estáticos montados a lo largo de los bordes de la zona de la fábrica con ayudantes móviles, como robots que se desplazan por los pasillos interiores. Los nodos fijos proporcionan una columna vertebral estable para la comunicación, mientras que los nodos móviles patrullan regiones sin cobertura, llenan huecos en el muestreo y transportan datos hacia un sumidero central. En lugar de colocar los dispositivos manualmente, el sistema utiliza planificación matemática para decidir dónde ubicar cada sensor estático y cómo deben moverse los nodos móviles a lo largo del tiempo, de modo que la mayor parte del espacio quede observada sin saturar el edificio con hardware.
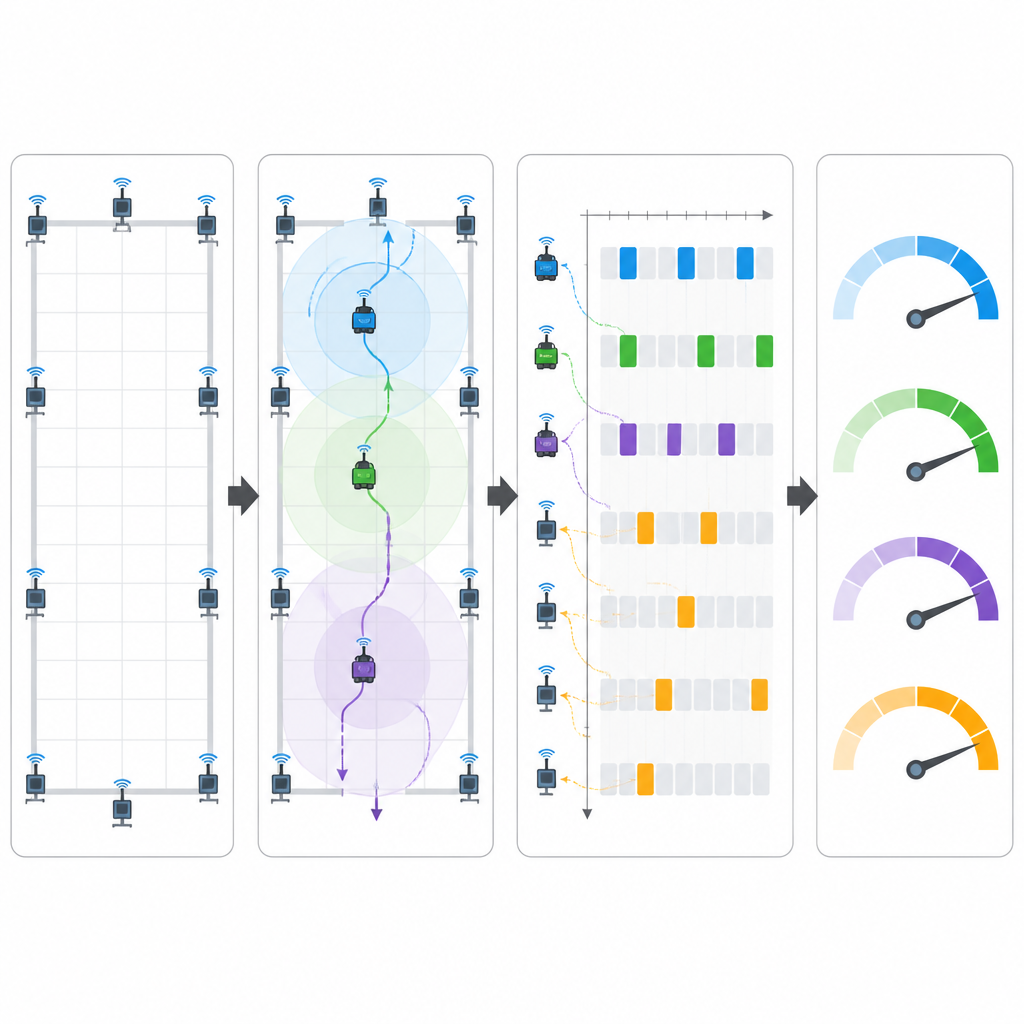
Planificar rutas y tiempo de aire conjuntamente
En el núcleo del enfoque, llamado MoC-TSCH, hay un motor de optimización que valora tres objetivos a la vez: qué tan bien está cubierta el área, la calidad de los enlaces de comunicación y el coste del movimiento de los nodos móviles. Ajustando pesos sencillos, un operario puede priorizar mayor cobertura, menos desplazamientos de robots o mejor calidad de enlace. El mismo marco también dirige cómo se asignan ranuras de tiempo y canales de radio, reaccionando a los cambios conforme los robots se mueven. En simulaciones por ordenador, esta planificación conjunta incrementa la cobertura desde alrededor del 40 por ciento hasta más del 88 por ciento, reduce el tiempo que tardan los nuevos nodos en incorporarse a la red, recorta la demora media de los mensajes de 128 a 89 milisegundos y reduce el consumo de energía de radio en aproximadamente un 40 por ciento.
De la simulación a robots reales
Para comprobar cómo funciona la idea más allá de los modelos de software, el equipo construyó un banco de pruebas interior. Pequeñas placas sensoras Bluetooth se colocaron alrededor de un laboratorio, enviando datos a un ordenador Raspberry Pi montado en un robot móvil TurtleBot. El robot llevaba un nodo de radio industrial que retransmitía la información sobre una red por ranuras de tiempo hacia un nodo raíz fijo. Dado que la matemática de la optimización es pesada para procesadores diminutos, las rutas y ubicaciones se calcularon fuera de línea y luego se cargaron en el firmware. Incluso con esta limitación y con los retrasos adicionales del reenvío por Bluetooth, el sistema alcanzó alta fiabilidad por encima del 93 por ciento y menor latencia que una configuración TSCH estándar, reproduciendo las tendencias observadas en simulación.
Qué significa esto para las fábricas del futuro
En términos sencillos, el estudio muestra que tratar la colocación, el movimiento y la programación de radio como un único problema de diseño combinado puede hacer que las redes inalámbricas de fábrica sean al mismo tiempo más completas y más rápidas, sin limitarse a añadir más hardware. MoC-TSCH coordina dónde se sitúan los sensores, cómo se mueven los robots y cuándo habla cada dispositivo para que las máquinas reciban datos más recientes con menos paquetes perdidos y menor consumo de batería. Aunque el trabajo actual se centra en diseños interiores pequeños y rutas preplanificadas, apunta hacia futuros emplazamientos industriales donde flotas de robots y sensores puedan adaptar sus movimientos y su tiempo de aire de forma concertada para mantener réplicas digitales y sistemas de control estrechamente sincronizados con el mundo físico.
Cita: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Palabras clave: internet industrial de las cosas, redes de sensores inalámbricos, robots móviles, programación de red, automatización industrial