Clear Sky Science · ar
MoC-TSCH: تحسين TSCH متعدد الأهداف قائم على MILP للحركية لتغطية الشبكة والاتصال في إنترنت الأشياء الصناعي
شبكات مصانع أذكى أثناء الحركة
تمتلئ المصانع الحديثة بأجهزة الاستشعار اللاسلكية والروبوتات المتحرّكة، لكن الحفاظ على اتصال كل هذه الأجهزة وتلقي البيانات في الوقت المناسب يصبح صعباً عندما تكون كل العناصر في حالة حركة. تستكشف هذه الورقة طريقة جديدة لتنظيم كيف تشارك أجهزة الاستشعار الثابتة والروبوتات المتجولة الطيف اللاسلكي بحيث تصل البيانات إلى الآلات بسرعة وبموثوقية ومع هدر طاقة أقل.
لماذا تواجه راديوهات المصانع الحالية صعوبات
تستخدم العديد من أجهزة الاستشعار الصناعية طريقة تسمى التبديل القنوي المجزأ زمنياً (time-slotted channel hopping)، حيث يتبع كل جهاز جدولاً زمنياً دقيقاً ويغيّر قنوات الراديو بانتظام. تعمل هذه الطريقة جيداً عندما تظل الآلات وأجهزة الاستشعار ثابتة، إذ تقلل التداخل وتوفر طاقة البطارية. لكن عند دخول روبوتات أو طائرات بدون طيار أو مركبات متحركة إلى المشهد، تتغير خريطة الشبكة باستمرار. الروابط تنقطع وتعود، وتضطر الأجهزة لإعادة الانضمام للشبكة بشكل متكرر، وتصبح الجداول المخططة بعناية غير متوافقة مع الواقع، مما يؤدي إلى نقاط عمياء، وتأخيرات، وزيادة استهلاك الطاقة.
خلط أجهزة ثابتة بمساعدة متجولة
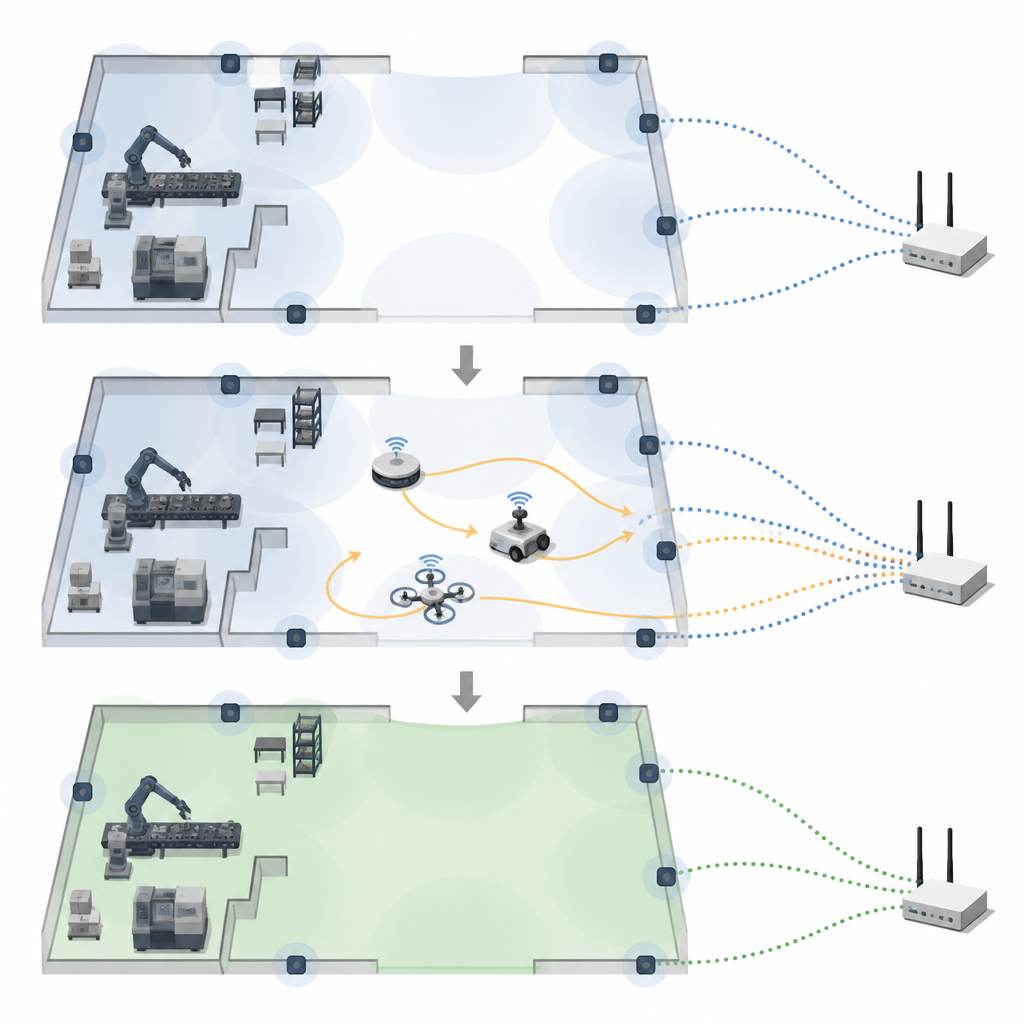
يقترح المؤلفون تصميمًا هجينيًا يجمع أجهزة الاستشعار الثابتة المثبتة على محيط منطقة المصنع مع مساعدين متحركين مثل روبوتات تتنقل في الممرات الداخلية. توفر العقد الثابتة عموداً فقرياً ثابتاً للاتصال، بينما تقوم العقد المتحركة بدوريات في المناطق غير المغطاة، وتملأ فراغات الاستشعار، وتنقل البيانات نحو نقطة تجميع مركزية. بدلاً من وضع الأجهزة يدوياً، يستخدم النظام التخطيط الرياضي لتقرير أماكن تركيب كل جهاز استشعار ثابت وكيفية تحرك العقد المتحركة مع مرور الوقت بحيث تتم مراقبة معظم المساحة دون إغراق الأرضية بأجهزة إضافية.
التخطيط لمسارات ووقت الهواء معاً
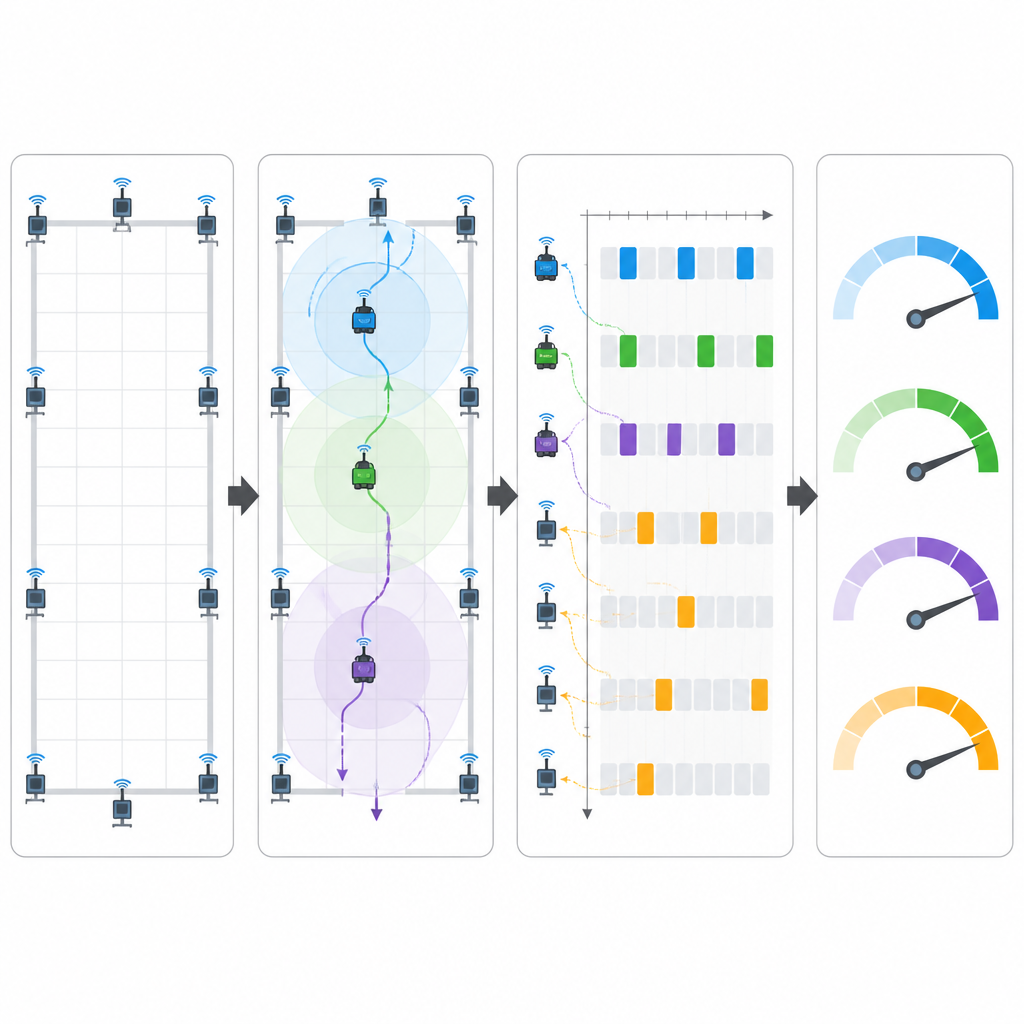
في جوهر المنهجية المسماة MoC-TSCH يوجد محرك تحسين يوازن بين ثلاثة أهداف في آن واحد: مدى التغطية في المنطقة، جودة روابط الاتصال، وتكلفة تحرك العقد المتحركة. من خلال تعديل أوزان بسيطة، يستطيع المشغّل تفضيل تغطية أوسع أو حركات روبوت أقل أو جودة رابط أفضل. نفس الإطار يوجّه أيضاً كيفية تخصيص الفترات الزمنية للقناة وقنوات الراديو، متفاعلاً مع التغيرات أثناء تحرك الروبوتات. في المحاكاة الحاسوبية، يعزز هذا التخطيط المشترك التغطية من نحو 40 بالمئة إلى أكثر من 88 بالمئة، ويقصر الوقت الذي تحتاجه العقد الجديدة للانضمام إلى الشبكة، ويخفض متوسط تأخير الرسائل من 128 إلى 89 مللي ثانية، ويقلل استهلاك طاقة الراديو بحوالي 40 بالمئة.
من المحاكاة إلى روبوتات حقيقية
لمعرفة كيف تعمل الفكرة خارج نماذج البرمجيات، بنا الفريق منصة اختبار داخلية. وُضعت لوحات حسّاس صغيرة بتقنية البلوتوث حول المختبر، ترسل البيانات إلى حاسوب راسبيري باي على روبوت متحرك من طراز TurtleBot. حمل الروبوت عقدة راديو صناعية قامت بتمرير المعلومات عبر شبكة مجزأة زمنياً إلى عقدة جذر ثابتة. وبما أن حسابات التحسين ثقيلة للمعالجات الصغيرة، فُحسِمَت المسارات وأماكن التركيب خارجياً ثم حُملت على البرنامج الثابت. حتى مع هذا القيد والتأخيرات الإضافية من تحويل البلوتوث، حقق النظام موثوقية عالية تفوق 93 بالمئة وتأخيراً أقل من إعداد مجزأ زمنيًا قياسيًا، متماشياً مع الاتجاهات المرصودة في المحاكاة.
ماذا يعني ذلك لمصانع المستقبل
بعبارات بسيطة، تُظهر الدراسة أن معاملة التوزيع والحركة وجدولة الراديو كمشكلة تصميم موحّدة يمكن أن تجعل شبكات المصانع اللاسلكية أكثر اكتمالاً واستجابةً، دون الاقتصار على إضافة المزيد من الأجهزة. ينسق MoC-TSCH مواقع أجهزة الاستشعار، وحركات الروبوتات، وأوقات بث كل جهاز بحيث تحصل الآلات على بيانات أحدث مع رسائل منخفضة الفقدان واستهلاك بطارية أقل. بينما يركّز العمل الحالي على تصميمات داخلية صغيرة ومسارات مخططة مسبقاً، إلا أنه يشير إلى مواقع صناعية مستقبلية حيث يمكن أساطيل من الروبوتات وأجهزة الاستشعار تكييف حركاتها وزمن الهواء بشكل متناغم للحفاظ على نسخ رقمية وأنظمة تحكم متزامنة بدقة مع العالم الفيزيائي.
الاستشهاد: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
الكلمات المفتاحية: الإنترنت الصناعي للأشياء, شبكات المستشعرات اللاسلكية, الروبوتات المتحركة, جدولة الشبكات, أتمتة المصانع