Clear Sky Science · ja
MoC-TSCH: IIoTにおけるネットワークカバレッジと接続性のための多目的MILPベースTSCH移動性最適化
動く工場ネットワークを賢くする
現代の工場はワイヤレスセンサや移動ロボットで満ちつつあるが、すべてが動いている状況ではこれらの機器を常に接続かつタイムリーに保つのは難しい。本論文は、固定センサと巡回するロボットが無線資源を共有する方法を新たに調整し、機械が迅速かつ信頼性高く、かつ無駄なエネルギー消費を抑えてデータをやり取りできるようにする手法を探る。
なぜ現在の工場用無線は苦戦するのか
多くの産業用センサはタイムスロット型チャネルホッピング(TSCH)という方式を使っており、各機器が厳密な時刻表に従い定期的にラジオチャネルを切り替える。機器が固定されている場合は干渉が減りバッテリも節約できるため有効だ。しかしロボットやドローン、移動する車両が加わるとネットワークの地図は刻々と変化する。リンクが断続し、機器は何度もネットワークに再参加しなければならず、綿密に計画されたスケジュールが現実と合わなくなり、死角、遅延、余分な消費電力が生じる。
固定センサと巡回支援の組み合わせ
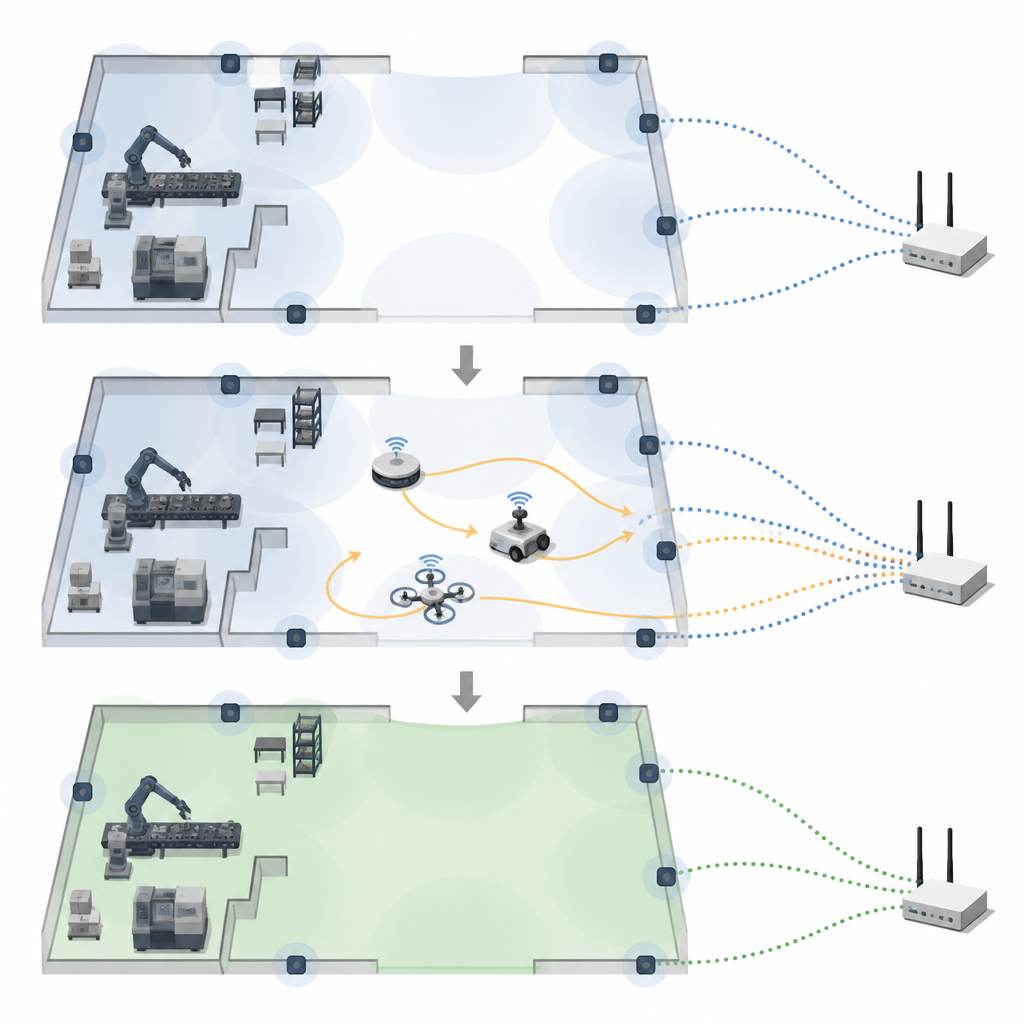
著者らは、工場エリアの縁に配置された固定センサと、内部通路を移動するロボット等の可動支援ノードを組み合わせたハイブリッド配置を提案する。固定ノードは通信の安定したバックボーンを提供し、移動ノードは未カバー領域を巡回してセンサの隙間を埋め、データを中央のシンクへ運ぶ。機器を手動で配置する代わりに、システムは数学的な計画手法を用いて各固定センサの配置と移動ノードの時間的な軌跡を決定し、設備を床一面に敷き詰めることなく空間の大部分を観測できるようにする。
経路と無線の空中時間を同時に計画する
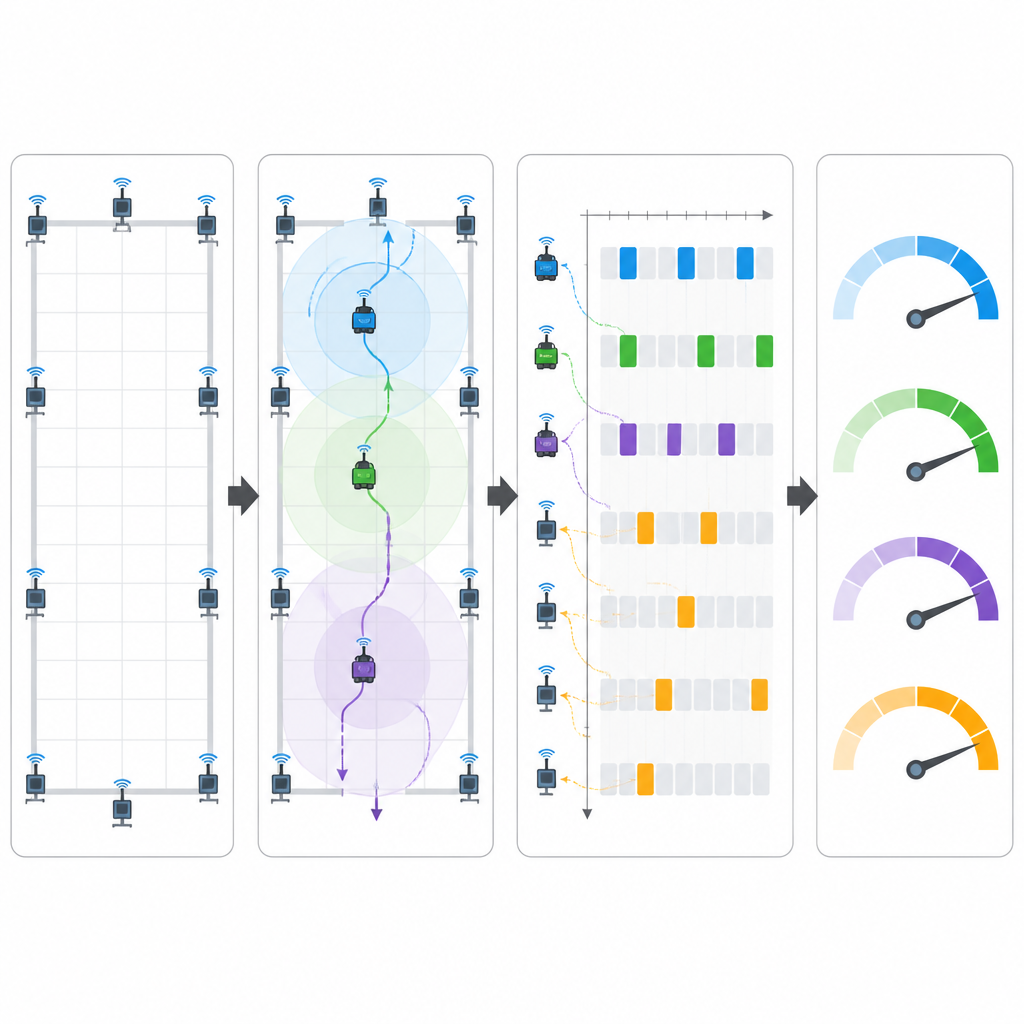
MoC-TSCHと呼ばれる本手法の中核は、領域のカバレッジ、通信リンク品質、移動ノードの移動コストという三つの目標を同時に評価する最適化エンジンである。単純な重みを調整することで、運用者は広いカバレッジ、ロボットの移動削減、あるいはリンク品質の向上を優先できる。同じフレームワークはタイムスロットやチャネルの割り当ても制御し、ロボットの移動に応じて割り当てを変化させる。シミュレーションでは、この結合計画によりカバレッジが約40%から88%以上に向上し、新規ノードのネットワーク参加に要する時間が短縮され、メッセージの平均遅延が128ミリ秒から89ミリ秒に低下し、無線のエネルギー消費が約40%削減された。
シミュレーションから実ロボットへ
ソフトウェアモデル以外での動作を確認するため、チームは屋内テストベッドを構築した。小型のBluetoothセンサボードをラボ内に配置し、TurtleBot移動ロボット上のRaspberry Piにデータを送信した。ロボットはタイムスロットネットワーク上で固定のルートノードへ情報を中継する産業用無線ノードを搭載した。最適化計算は小型プロセッサでは負荷が大きいため、経路と配置はオフラインで算出してファームウェアに読み込んだ。この制約やBluetooth中継による遅延があっても、システムは93%以上の高い信頼性と標準的なタイムスロット設定より低い遅延を達成し、シミュレーションで観察された傾向と一致した。
将来の工場にとっての意味
端的に言えば、本研究は配置、移動、および無線スケジューリングを一つの統合設計課題として扱うことで、単にハードウェアを増やすことなくワイヤレス工場ネットワークをより完全かつ応答性の高いものにできることを示している。MoC-TSCHはセンサの配置、ロボットの動き、各機器の送信タイミングを調整して、より新鮮なデータをより少ないパケットロスと低い電力消費で機械に届ける。現状の研究は小規模な屋内配置と事前計画された経路に焦点を当てているが、今後はロボット群とセンサ群が連携して動きや空中時間を適応させ、デジタルツインや制御システムを物理世界とより密接に同期させる産業現場へとつながることを示唆している。
引用: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
キーワード: 産業用モノのインターネット, ワイヤレスセンサネットワーク, 移動ロボット, ネットワークスケジューリング, 工場オートメーション