Clear Sky Science · ru
MoC-TSCH: многокритериальная оптимизация мобильности TSCH на основе MILP для покрытия сети и связности в IIoT
Более интеллектуальные заводские сети в движении
Современные заводы наполняются беспроводными датчиками и мобильными роботами, но поддерживать связь и своевременную доставку данных, когда всё движется, непросто. В статье исследуется новый подход к согласованию работы стационарных датчиков и перемещающихся роботов в радиочастотном пространстве, чтобы машины получали данные быстро, надёжно и с меньшими энергозатратами.
Почему сегодняшние заводские радиосети испытывают трудности
Многие промышленные датчики используют метод time-slotted channel hopping, при котором каждое устройство следует точному расписанию и регулярно меняет радиоканалы. Это хорошо работает, когда машины и датчики стоят на месте, поскольку сокращает помехи и экономит батарею. Появление роботов, дронов или движущихся транспортных средств меняет карту сети: связи прерываются, устройства вынуждены повторно подключаться, а заранее рассчитанные расписания перестают соответствовать реальности, что приводит к «слепым» зонам, задержкам и дополнительному расходу энергии.
Сочетание стационарных датчиков и патрулирующих помощников
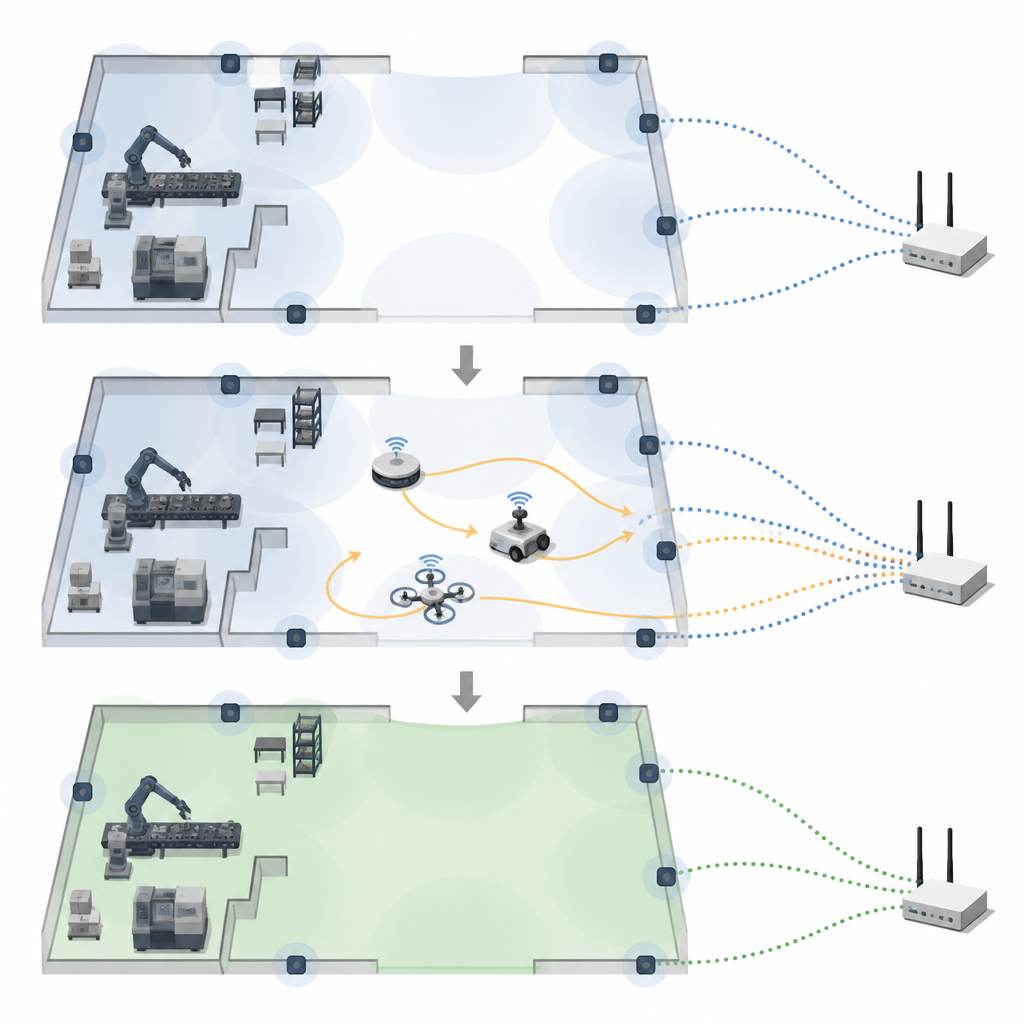
Авторы предлагают гибридную архитектуру, которая объединяет статические датчики, размещённые по краю производственной зоны, с мобильными помощниками — роботами, движущимися по внутренним коридорам. Стационарные узлы формируют стабильный каркас связи, а мобильные патрулируют незакрытые участки, заполняют пробелы в наблюдении и транспортируют данные к центральному узлу. Вместо ручной расстановки устройств система использует математическое планирование, чтобы решить, где разместить каждый стационарный сенсор и как должны двигаться мобильные узлы со временем, чтобы покрытие пространства было максимальным без избыточного оборудования.
Планирование маршрутов и эфирного времени совместно
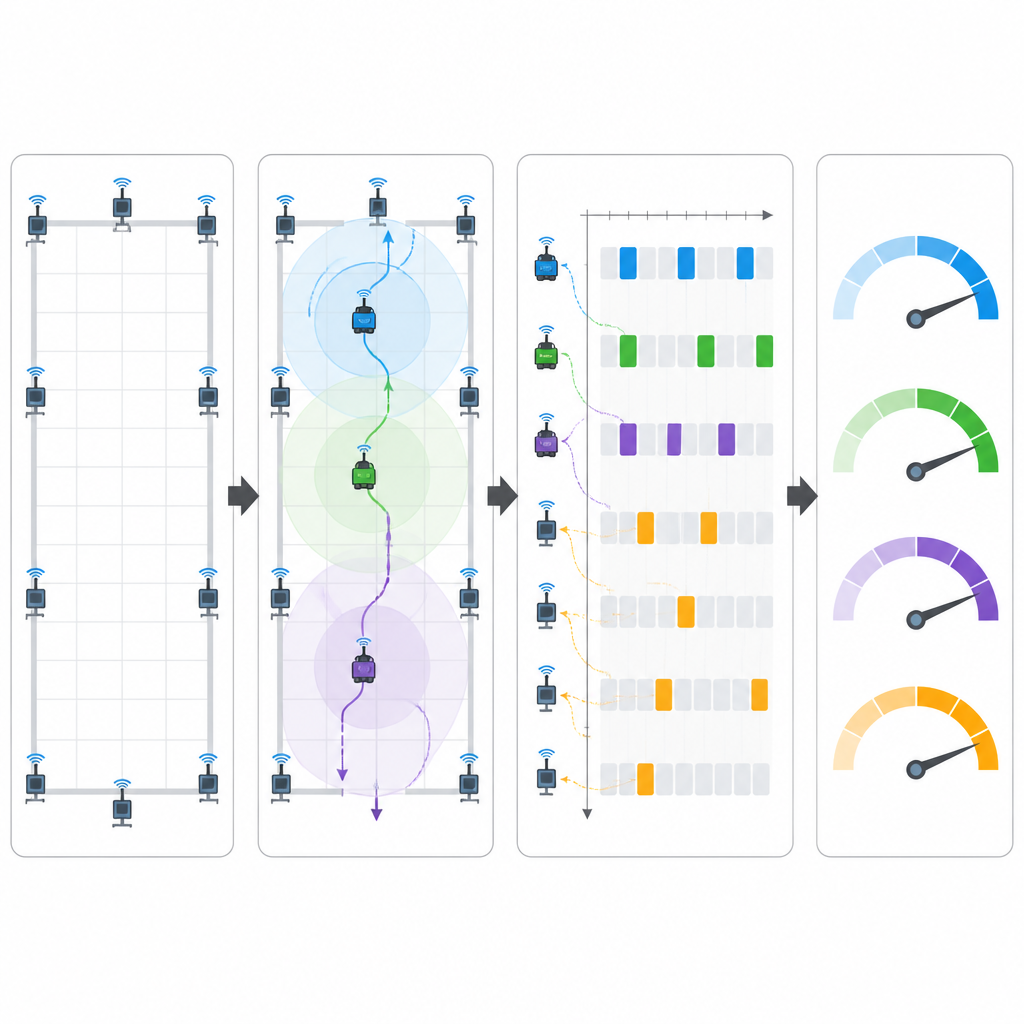
В основе подхода MoC-TSCH лежит оптимизационный механизм, который одновременно учитывает три цели: насколько хорошо покрыта территория, каково качество коммуникационных каналов и какова стоимость перемещений мобильных узлов. Изменяя простые веса, оператор может отдавать приоритет более широкому покрытию, меньшему движению роботов или лучшему качеству каналов. Та же схема управляет распределением радиочасов и каналов, адаптируясь к изменениям по мере движения роботов. В компьютерных симуляциях совместное планирование повышало покрытие примерно с 40 до более чем 88 процентов, сокращало время подключения новых узлов, уменьшало среднюю задержку сообщений с 128 до 89 миллисекунд и снижало энергозатраты радиосвязи примерно на 40 процентов.
От моделирования к реальным роботам
Чтобы проверить идею вне программных моделей, команда создала лабораторный тестовый стенд. Небольшие Bluetooth-платы с датчиками разместили по лаборатории и отправляли данные на Raspberry Pi, установленный на мобильном роботе TurtleBot. Робот нёс промышленный радиоузел, ретранслирующий информацию по сети с разделёнными по времени слотами к фиксированному корневому узлу. Поскольку оптимизационная математика тяжела для маломощных процессоров, маршруты и расположения вычислялись заранее и загружались в прошивку. Даже с этим ограничением и дополнительными задержками от Bluetooth-перенаправления система сохраняла высокую надёжность — свыше 93 процентов — и меньшую задержку по сравнению со стандартной временем-слотированной конфигурацией, повторяя тенденции, наблюдаемые в симуляциях.
Что это значит для будущих заводов
Проще говоря, исследование показывает, что объединение задач размещения, движения и планирования радиодоступа в одно проектное решение может сделать беспроводные заводские сети более полными и отзывчивыми без простого наращивания оборудования. MoC-TSCH координирует, где расположены сенсоры, как двигаются роботы и когда каждое устройство передаёт данные, чтобы машины получали более свежую информацию с меньшим числом потерянных сообщений и сниженным расходом батареи. Хотя текущая работа ориентирована на небольшие внутренние пространства и заранее спланированные траектории, она указывает путь к будущим промышленным площадкам, где флоты роботов и сенсоров смогут согласованно адаптировать движение и эфирное время, поддерживая цифровые копии и системы управления в более тесной синхронизации с физическим миром.
Цитирование: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Ключевые слова: промышленный интернет вещей, беспроводные сенсорные сети, мобильные роботы, планирование сети, автоматизация производства