Clear Sky Science · sv
MoC-TSCH: multi-måls MILP-baserad TSCH-rörelseoptimering för nätverkstäckning och anslutning i IIoT
Smartare fabriksnätverk i rörelse
Moderna fabriker fylls av trådlösa sensorer och mobila robotar, men att hålla alla dessa enheter anslutna och snabba är svårt när allt rör på sig. Denna artikel utforskar ett nytt sätt att koreografera hur fasta sensorer och vandrande robotar delar radiospektrat så att maskiner får data snabbt, pålitligt och med mindre slöseri av energi.
Varför dagens fabriksradio har problem
Många industriella sensorer använder en metod kallad time-slotted channel hopping, där varje enhet följer ett precist tidsschema och regelbundet byter radiokanaler. Detta fungerar bra när maskiner och sensorer står still, eftersom det minskar störningar och sparar batteri. När robotar, drönare eller rörliga fordon kommer in i bilden förändras nätverkskartan hela tiden. Länkar faller bort och återuppstår, enheter måste upprepade gånger återansluta till nätverket, och noggrant planerade scheman stämmer inte längre med verkligheten, vilket leder till döda zoner, fördröjningar och ökad energiförbrukning.
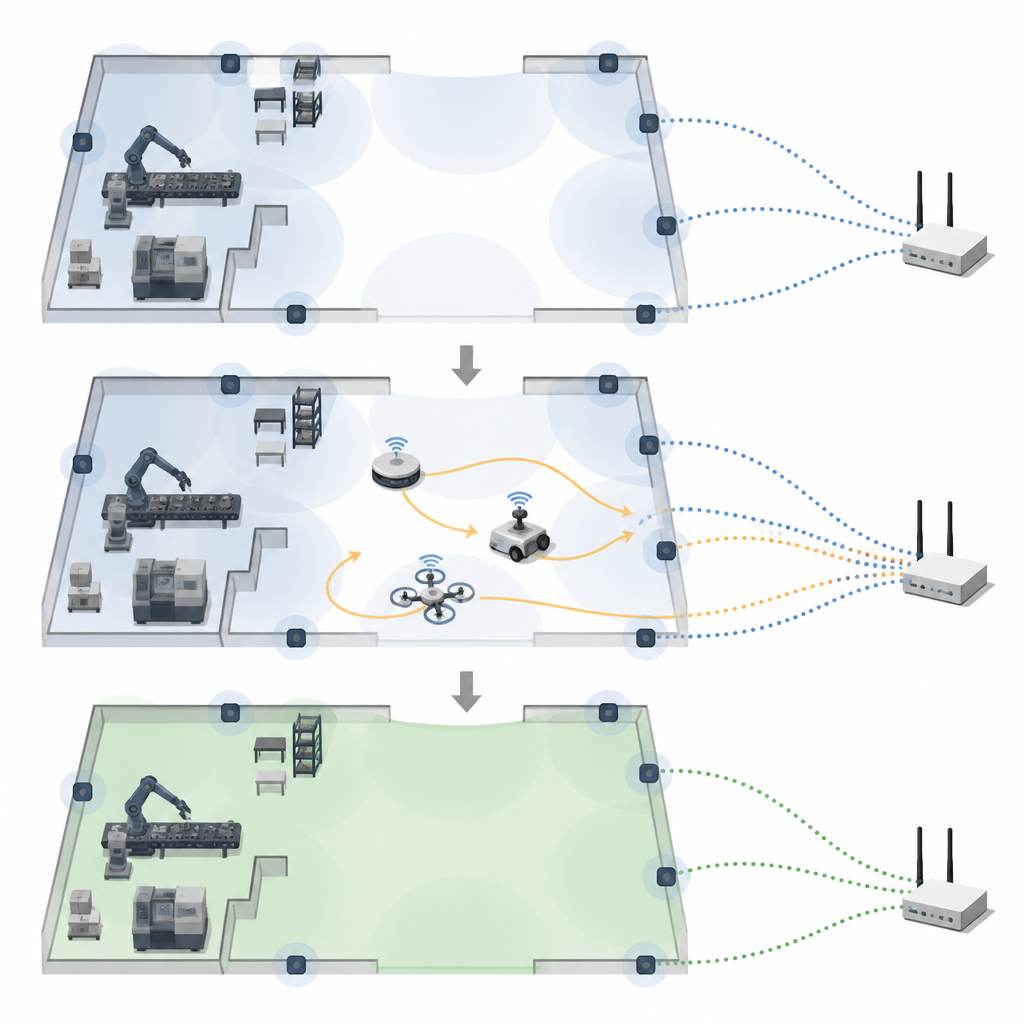
Blanda fasta sensorer med vandrande hjälpare
Författarna föreslår en hybridlayout som kombinerar statiska sensorer monterade längs kanterna av ett fabriksområde med mobila hjälpare som robotar som rör sig genom inre korridorer. Fasta noder ger en stabil ryggrad för kommunikation, medan mobila noder patrullerar otäckta områden, fyller igen sensorluckor och för data mot en central sink. Istället för att placera enheter manuellt använder systemet matematisk planering för att bestämma var varje statisk sensor ska sitta och hur mobila noder bör röra sig över tid så att största delen av ytan övervakas utan att golvet fylls av hårdvara.
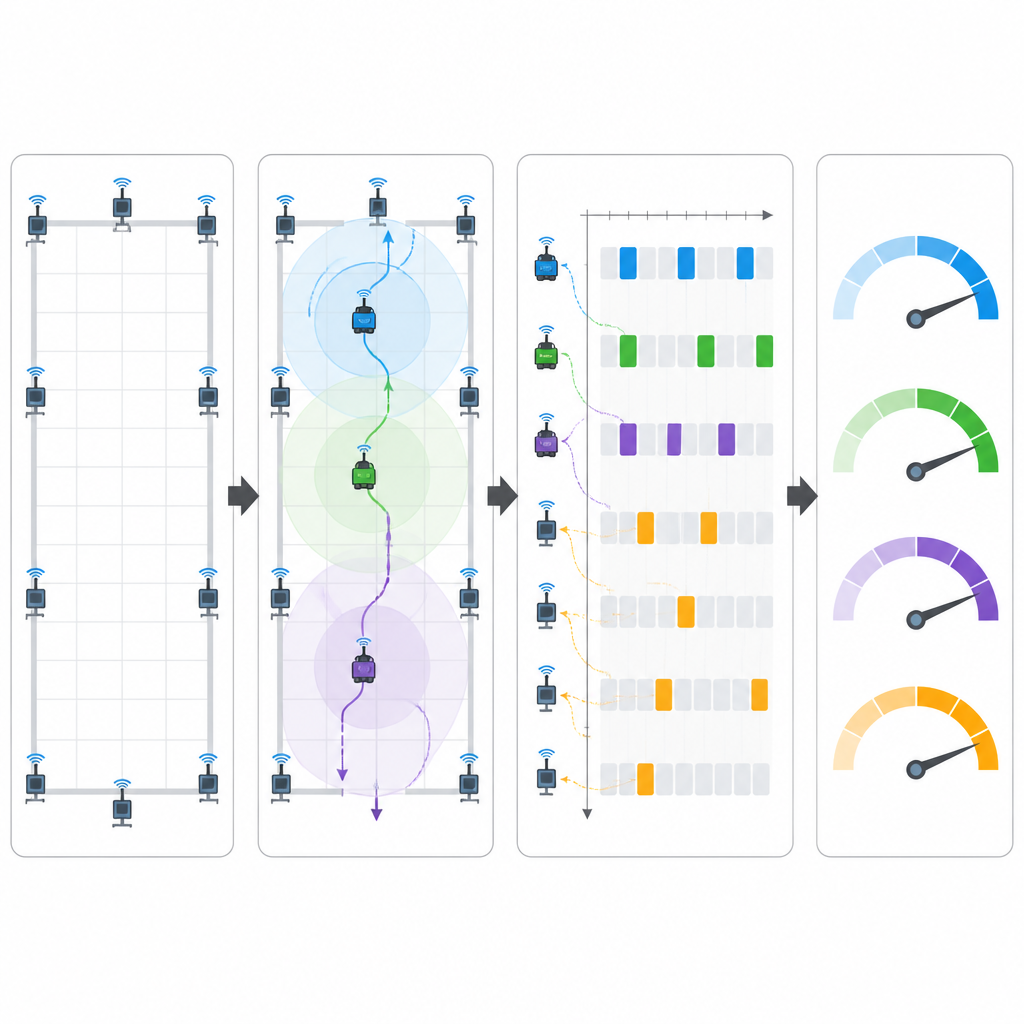
Planera vägar och lufttid tillsammans
I hjärtat av metoden, kallad MoC-TSCH, finns en optimeringsmotor som väger tre mål samtidigt: hur väl området täcks, hur bra kommunikationslänkarna är, och hur kostsamt det är för mobila noder att förflytta sig. Genom att justera enkla vikter kan en operatör prioritera bredare täckning, färre robotrörelser eller bättre länkkvalitet. Samma ramverk styr också hur radiotidsluckor och kanaler tilldelas, och reagerar på förändringar när robotarna rör sig. I datorsimuleringar ökade denna gemensamma planering täckningen från omkring 40 procent till över 88 procent, förkortade tiden nya noder behöver för att ansluta till nätverket, minskade meddelandefördröjningen i genomsnitt från 128 till 89 millisekunder och reducerade radioenergianvändningen med ungefär 40 procent.
Från simulering till verkliga robotar
För att se hur idén fungerar bortom mjukvarumodeller byggde teamet ett inomhus testbädd. Små Bluetooth-sensorkort placerades runt ett labb och skickade data till en Raspberry Pi-dator på en TurtleBot-mobilrobot. Roboten bar en industriell radionod som vidarebefordrade information över ett tidsluckebaserat nätverk till en fast root-nod. Eftersom optimeringsmatematiken är tung för små processorer beräknades rutterna och placeringarna offline och laddades sedan in i firmware. Även med denna begränsning och tillagda fördröjningar från Bluetooth-vidarebefordran uppnådde systemet ändå hög tillförlitlighet över 93 procent och lägre fördröjning än en standard tidsluckeuppsättning, vilket speglade trenderna som sågs i simuleringarna.
Vad detta innebär för framtidens fabriker
Enkelt uttryckt visar studien att att betrakta placering, rörelse och radioschemaläggning som ett sammanhållet konstruktionsproblem kan göra trådlösa fabriksnät både mer fullständiga och mer responsiva, utan att bara lägga till mer hårdvara. MoC-TSCH koordinerar var sensorer placeras, hur robotar rör sig och när varje enhet talar så att maskiner får färskare data med färre tappade meddelanden och minskad batterianvändning. Medan det aktuella arbetet fokuserar på små inomhuslayout och förplanerade banor pekar det mot framtida industrimiljöer där flockar av robotar och sensorer kan anpassa sina rörelser och lufttid i samklang för att hålla digitala kopior och styrsystem nära synkroniserade med den fysiska världen.
Citering: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Nyckelord: industriella sakernas internet, trådlösa sensornätverk, mobila robotar, nätschemaläggning, fabrikautomation