Clear Sky Science · it
MoC-TSCH: ottimizzazione TSCH per la mobilità basata su MILP multi-obiettivo per copertura e connettività di rete nell’IIoT
Reti di fabbrica più intelligenti in movimento
Le fabbriche moderne si stanno riempiendo di sensori wireless e robot mobili, ma mantenere tutti questi dispositivi connessi e puntuali è difficile quando tutto è in movimento. Questo articolo esplora un nuovo modo di orchestrare la condivisione dello spettro tra sensori fissi e robot in movimento, così che le macchine ricevano dati in modo rapido, affidabile e con meno spreco di energia.
Perché le radio di oggi faticano
Molti sensori industriali usano un metodo chiamato time-slotted channel hopping, in cui ogni dispositivo segue un calendario preciso e cambia regolarmente canale radio. Questo funziona bene quando macchine e sensori restano fermi, poiché riduce le interferenze e risparmia batteria. Quando però entrano in gioco robot, droni o veicoli in movimento, la mappa della rete cambia continuamente. I collegamenti cadono e si ricollegano, i dispositivi devono riconnettersi ripetutamente e gli orari pianificati non coincidono più con la realtà, generando punti ciechi, ritardi e consumi energetici aggiuntivi.
Mescolare sensori fissi e aiutanti in movimento
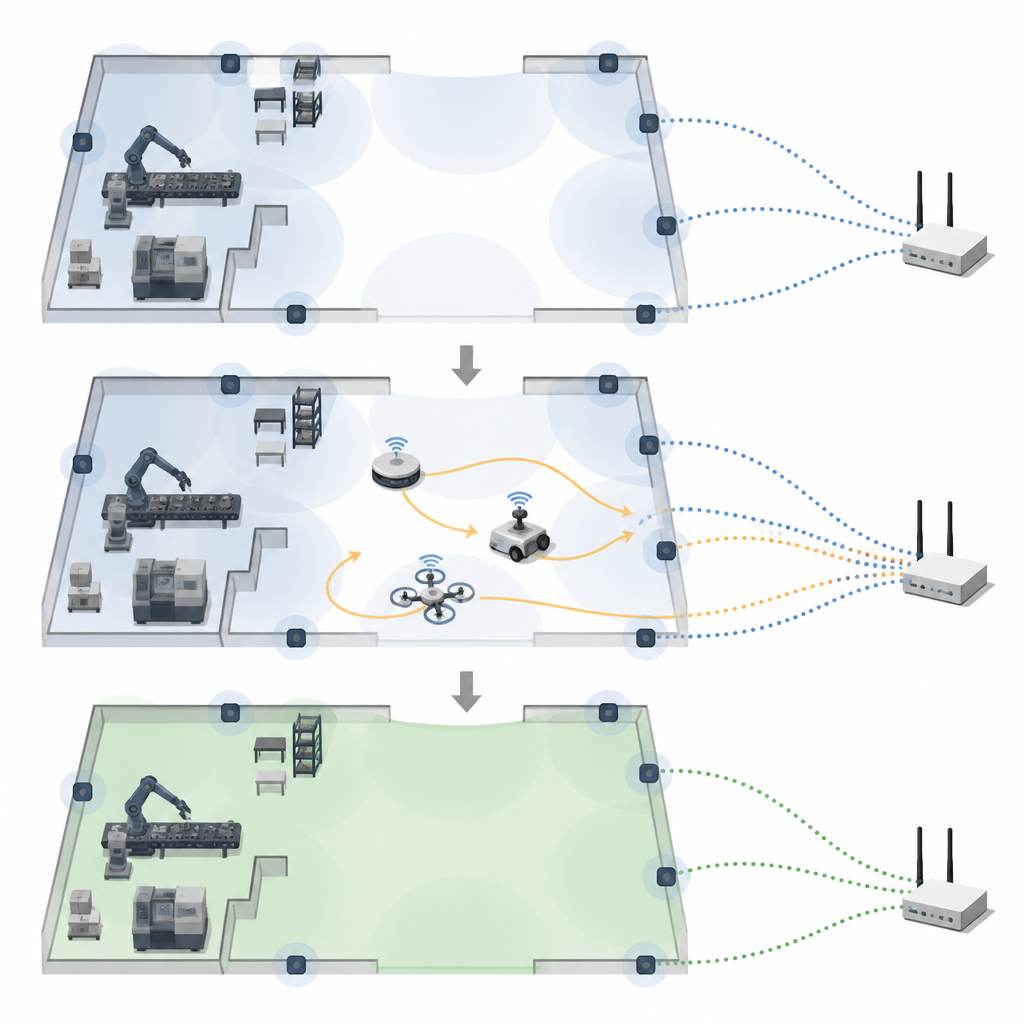
Gli autori propongono una configurazione ibrida che combina sensori statici montati lungo i bordi dell’area di fabbrica con nodi mobili come robot che si muovono nei corridoi interni. I nodi fissi forniscono una dorsale stabile per la comunicazione, mentre i nodi mobili pattugliano le zone scoperte, colmano le lacune di rilevamento e trasportano i dati verso un sink centrale. Invece di posizionare i dispositivi a mano, il sistema usa una pianificazione matematica per decidere dove collocare ogni sensore statico e come i nodi mobili dovrebbero muoversi nel tempo, in modo che la maggior parte dello spazio sia osservata senza inondare l’area di hardware.
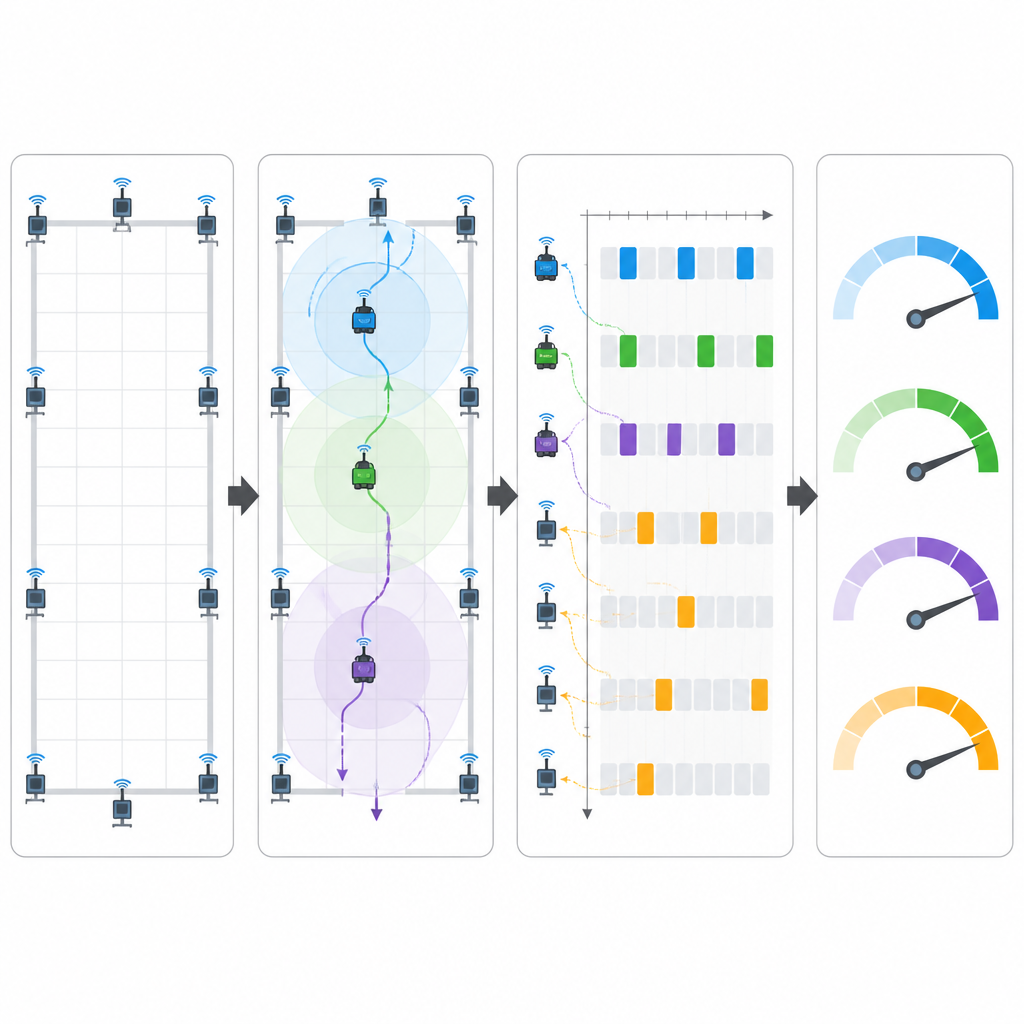
Pianificare insieme percorsi e tempo d’aria
Al centro dell’approccio, chiamato MoC-TSCH, c’è un motore di ottimizzazione che bilancia tre obiettivi contemporaneamente: quanto bene è coperta l’area, la qualità dei collegamenti di comunicazione e il costo di movimento dei nodi mobili. Regolando semplici pesi, un operatore può privilegiare una copertura più ampia, meno spostamenti dei robot o una migliore qualità dei link. Lo stesso framework dirige anche l’assegnazione di slot temporali e canali radio, reagendo ai cambiamenti man mano che i robot si muovono. Nelle simulazioni al computer, questa pianificazione congiunta aumenta la copertura da circa il 40% a oltre l’88%, riduce il tempo di associazione dei nuovi nodi, accorcia il ritardo medio dei messaggi da 128 a 89 millisecondi e diminuisce il consumo radio di circa il 40%.
Dalla simulazione ai robot reali
Per valutare l’idea oltre i modelli software, il team ha costruito un banco di prova indoor. Piccole schede sensore Bluetooth sono state posizionate in un laboratorio, inviando dati a un computer Raspberry Pi montato su un robot mobile TurtleBot. Il robot portava un nodo radio industriale che ritrasmetteva informazioni su una rete a slot temporali a un nodo radice fisso. Poiché la matematica dell’ottimizzazione è pesante per processori molto piccoli, i percorsi e le posizioni sono stati calcolati offline e poi caricati nel firmware. Anche con questo vincolo e con ritardi aggiuntivi dovuti all’inoltro via Bluetooth, il sistema ha comunque raggiunto un’elevata affidabilità superiore al 93% e una latenza inferiore rispetto a una configurazione time-slotted standard, rispecchiando le tendenze osservate in simulazione.
Cosa significa per le fabbriche del futuro
In parole semplici, lo studio dimostra che considerare in modo congiunto posizionamento, movimento e schedulazione radio può rendere le reti wireless di fabbrica più complete e più reattive, senza limitarsi ad aggiungere più hardware. MoC-TSCH coordina dove si collocano i sensori, come si muovono i robot e quando ogni dispositivo trasmette, affinché le macchine ricevano dati più aggiornati con meno messaggi persi e minor consumo di batteria. Pur essendo il lavoro attuale focalizzato su layout interni di piccola scala e percorsi pre-pianificati, indica un futuro in cui flotte di robot e sensori possono adattare i loro movimenti e il loro tempo d’aria in concerto per mantenere repliche digitali e sistemi di controllo strettamente sincronizzati con il mondo fisico.
Citazione: Mulatu, A.N., Zennaro, M., Gared, F. et al. MoC-TSCH: multi-objective MILP-based TSCH mobility optimization for network coverage and connectivity in IIoT. Sci Rep 16, 15075 (2026). https://doi.org/10.1038/s41598-026-45560-8
Parole chiave: internet industriale delle cose, reti di sensori wireless, robot mobili, schedulazione di rete, automazione di fabbrica