Clear Sky Science · zh
自适应模糊滑模控制应用于倒立摆
在移动小车上保持杆子平衡
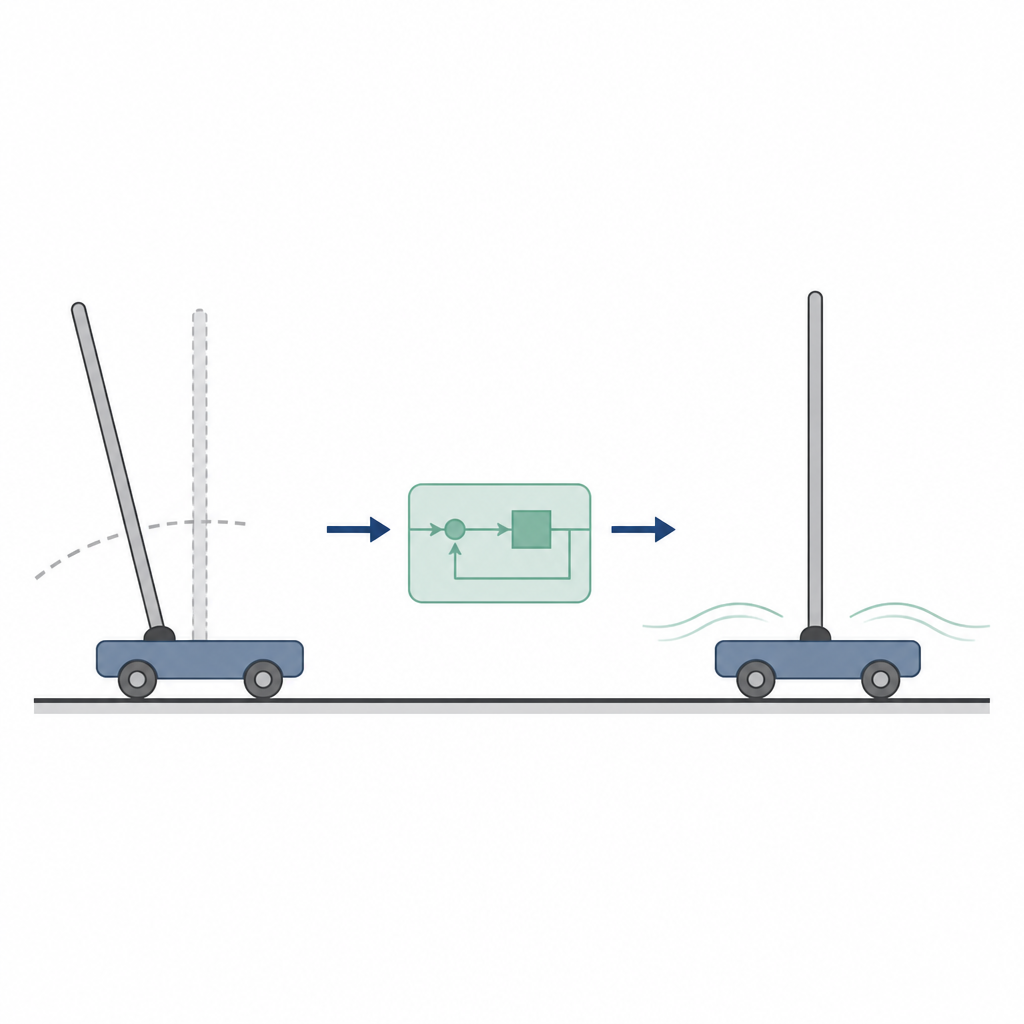
想象一下,你在掌心上保持一把扫把直立,同时还要走到房间里的某个指定位置。你必须在地面有颠簸或扫把重量变化的情况下,既防止扫把倾倒,又把身体引导到正确的位置。本研究处理的是类似的工程难题:教会一辆移动小车在节省能量并应对突发情况的同时,使一根杆子直立并平稳移动到目标位置。
为何这种平衡很重要
带有直立摆的小车是一个经典的困难控制问题测试用例。它反映了火箭、双轮机器人,甚至部分人形机器人的情形——高而窄的机体必须在移动的基座上保持直立。该系统具有挑战性,因为只有对小车施加单一控制力,但既要管理小车的运动又要控制摆的角度。质量、长度或摩擦的微小变化都可能使系统失稳,因此任何控制方法不仅要使摆保持平衡,还必须在现实情况与数学模型不完全匹配时保持可靠性。
从僵硬控制到更平滑的引导
工程师长期以来使用称为滑模控制的方法来处理这类不确定系统。该方法通过将系统行为强制引导到精心选择的轨迹并保持在其上,从而对扰动和建模误差具有很强的鲁棒性。然而,这种方法往往使控制信号发生突变,导致快速来回的运动,称为颤振。实际上,这会浪费能量、加速电机磨损,并可能激发不希望的振动。采用模糊逻辑的更柔和方法可以平滑控制动作,但在条件显著变化时,常常丧失部分所需的强健性。
将智能规则与鲁棒控制结合
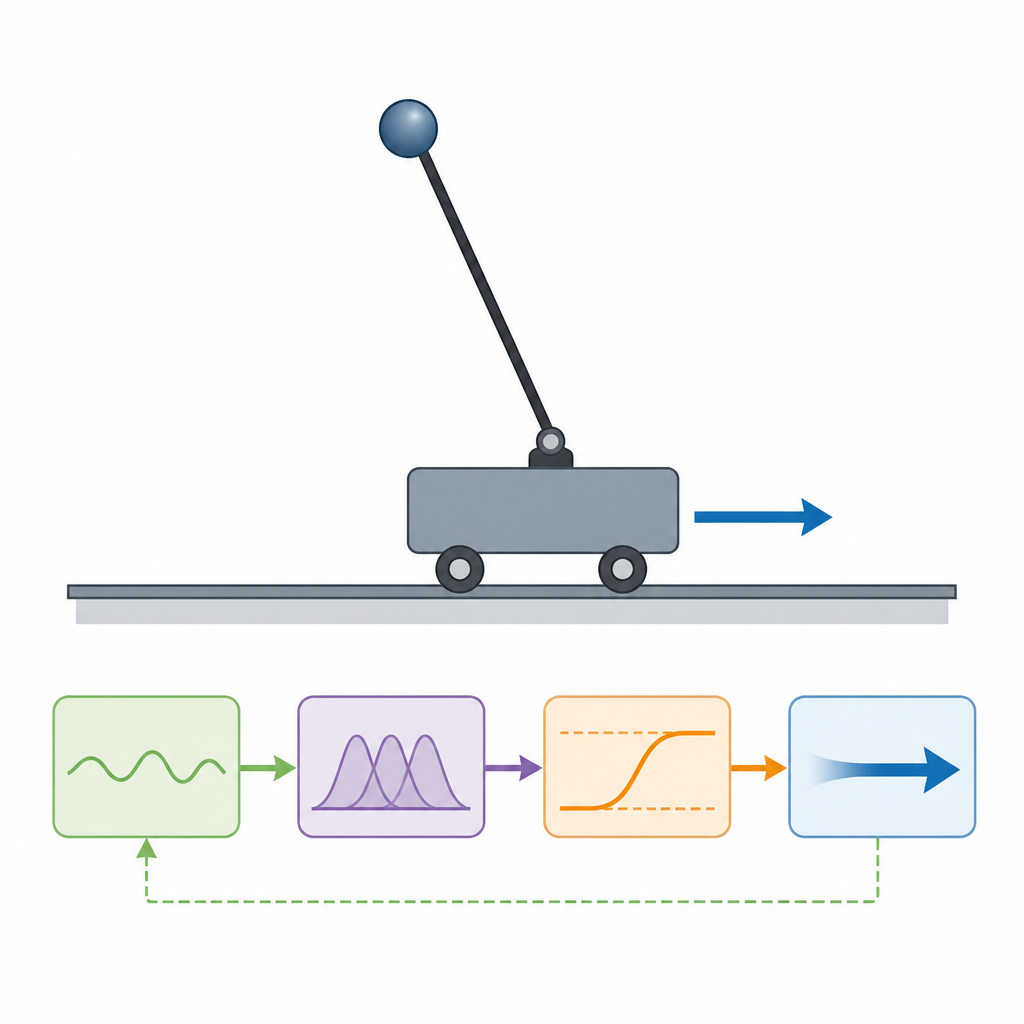
作者提出了一种自适应模糊滑模控制器,融合了两者的优势。首先,他们使用标准力学建立了小车与摆的数学模型,展示了小车推力与摆动之间的紧密耦合。随后设计了一个分层的目标轨迹(滑动面),优先保证摆的直立,同时引导小车到期望位置。在此基础上,一个模糊逻辑系统观测系统偏离目标的程度及其变化速率,利用简单的规则式决策将生硬的开关控制替换为更平滑的信号。第二层模糊系统则调整控制器的作用强度:当摆偏离较远时增强控制力度,接近平衡时则逐步放松。
新控制器在受扰下的表现
研究人员在计算机仿真中测试了三种方法:传统滑模方法、模糊滑模版本以及他们提出的自适应模糊滑模控制器。他们在正常条件下、对小车施加突推时,以及改变系统质量和长度以模拟设计误差或载荷变化时检验性能。基本滑模方法响应迅速但出现超调并产生明显颤振,伴随极大的控制力。模糊滑模控制较为平滑,但在参数变化时可能丧失一些精度。自适应模糊滑模控制器在所有场景下都能将摆和小车保持在期望值附近,同时使用最小的总体控制能量,并维持平和且良好受控的运动。
对未来机器的意义
简言之,研究表明,通过模糊规则式推理自适应调节控制强度的控制器,能够使不稳系统保持直立、抵抗扰动并降低能耗,而不会产生神经样的震颤。通过在误差增大或减小时自动调节响应,自适应模糊滑模控制器为在难以控制的设备中平衡性能与平滑性提供了实用方案。这一方法可以扩展到实验室外的小车与摆系统,应用于移动机器人、空中飞行器以及其他必须在变化且不确定环境中保持稳定的欠驱动机器。
引用: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
关键词: 倒立摆, 模糊控制, 滑模控制, 鲁棒控制, 欠驱动系统