Clear Sky Science · ru
Адаптивное нечеткое скользящее режимное управление, применённое к перевёрнутому маятнику
Удержание палки на движущейся тележке
Представьте, что вы пытаетесь удержать метлу вертикально на ладони, одновременно идя к определённому месту в комнате. Нужно не дать метле опрокинуться и при этом переместить тело в нужную точку, несмотря на неровности пола или изменение веса метлы. Это исследование решает аналогичную инженерную задачу: обучить движущуюся тележку удерживать стержень в вертикальном положении и плавно перемещаться к целевой позиции, при этом экономя энергию и справляясь с неожиданностями.
Почему этот баланс важен
Тележка с вертикальным маятником — классический тест для сложных задач управления. Она отражает ситуации в ракетах, двухколёсных роботах и даже в некоторых частях гуманоидных роботов, где высокий узкий корпус должен оставаться вертикальным на движущейся базе. Система сложна тем, что доступна лишь одна управляющая сила на тележке, хотя одновременно нужно управлять и движением тележки, и углом маятника. Небольшие изменения массы, длины или трения могут сделать систему неустойчивой, поэтому любой метод управления должен не только удерживать маятник, но и оставаться надёжным, когда реальный мир не полностью совпадает с математической моделью.
От жёсткого управления к более плавному вождению
Инженеры давно используют метод, называемый скользящим режимом, чтобы справляться с такими неопределёнными системами. Он заставляет поведение системы следовать выбранной траектории и удерживает её на ней, что делает метод очень устойчивым к возмущениям и ошибкам моделирования. Однако этот метод склонен резким переключениям управляющего выхода, что приводит к быстрому маятникообразному движению, называемому дрожанием (chattering). На практике это может тратить энергию, изнашивать моторы и возбуждать нежелательные вибрации. Мягкие методы на основе нечеткой логики способны сгладить управление, но часто теряют часть требуемой жёсткости при значительных изменениях условий.
Смешение разумных правил и робастного управления
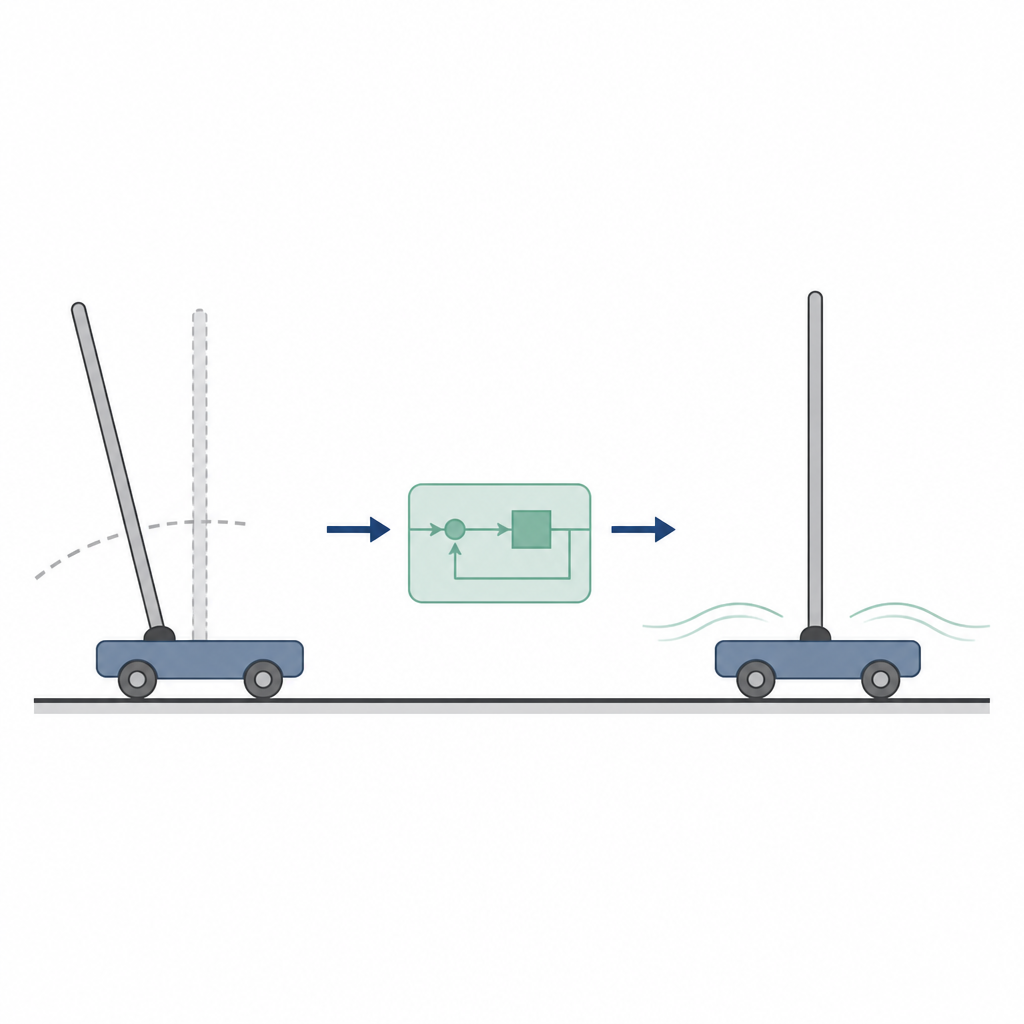
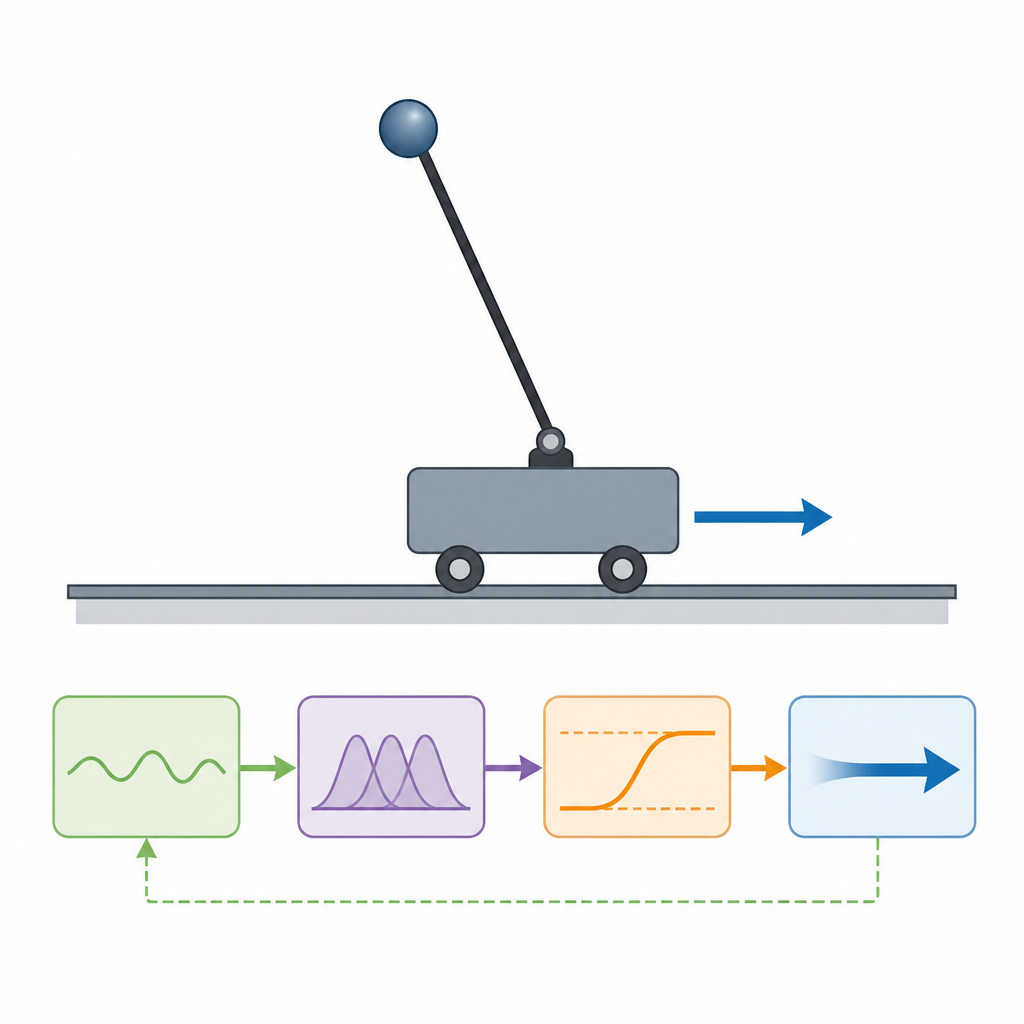
Авторы предлагают адаптивный нечеткий скользяще-режимный регулятор, который сочетает сильные стороны обоих подходов. Сначала они строят математическую модель тележки и маятника с использованием стандартной механики, показывая, как толчок тележки и колебания маятника тесно связаны. Затем они проектируют многоуровневую целевую траекторию — скользящую поверхность, которая отдаёт приоритет удержанию маятника в вертикальном положении и одновременно направляет тележку в нужное место. Поверх этого работает система нечеткой логики, которая наблюдает, насколько система отклоняется от цели и как быстро она движется, и использует простые правилоподобные решения, чтобы заменить грубое включение/выключение более плавным сигналом. Второй нечеткий слой настраивает силу воздействия регулятора, усиливая управление, когда маятник значительно отклоняется от вертикали, и ослабляя его по мере приближения к балансу.
Как новый регулятор ведёт себя под нагрузкой
Исследователи протестировали три подхода в компьютерном моделировании: традиционный скользящий режим, нечеткую скользящую версию и их адаптивный нечеткий скользящий регулятор. Они оценивали поведение в нормальных условиях, при внезапном толчке тележке и при изменении массы и длины системы, имитирующем ошибки проектирования или смену полезной нагрузки. Базовый скользящий метод реагирует быстро, но допускает переразгон и сильное дрожание с очень большими управляющими усилиями. Нечеткая скользящая версия работает более плавно, но может терять точность при изменении параметров. Адаптивный нечеткий скользящий регулятор удерживает маятник и тележку близко к требуемым значениям во всех сценариях, при этом используя наименьшее суммарное управляющее усилие и обеспечивая мягкие, предсказуемые движения.
Что это значит для будущих машин
Проще говоря, исследование показывает, что регулятор, адаптирующий свою силу с помощью нечеткого правилоподобного рассуждения, способен удерживать шаткую систему в вертикальном положении, отвергать возмущения и экономить энергию, при этом без нервных подёргиваний. Автоматически подстраивая ответ по мере роста или уменьшения ошибок, адаптивный нечеткий скользящий регулятор предлагает практическое решение для баланса между производительностью и плавностью в устройствах, которыми трудно управлять. Подход можно распространить за пределы лабораторной тележки с маятником на мобильных роботов, летательные аппараты и другие неполностью приводные машины, которым нужно сохранять устойчивость в меняющемся и неопределённом мире.
Цитирование: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Ключевые слова: перевёрнутый маятник, нечеткое управление, скользящее режимное управление, робастное управление, неполностью приводные системы