Clear Sky Science · pl
Adaptacyjna rozmyta kontrola w trybie ślizgowym zastosowana do odwróconego wahadła
Utrzymanie kija na równi na poruszającym się wózku
Wyobraź sobie, że próbujesz utrzymać miotłę pionowo na dłoni, jednocześnie idąc do określonego miejsca w pokoju. Musisz powstrzymać miotłę przed przewróceniem się, jednocześnie kierując ciałem w odpowiednie miejsce, mimo nierówności podłogi czy zmian w wadze miotły. To badanie stawia podobne wyzwanie inżynieryjne: uczy poruszający się wózek, jak utrzymać pręt w pionie i płynnie doprowadzić go do docelowej pozycji, jednocześnie oszczędzając energię i radząc sobie z niespodziankami.
Dlaczego ten balans ma znaczenie
Wózek z pionowym wahadłem to klasyczny przykład trudnego problemu sterowania. Odzwierciedla sytuacje występujące w rakietach, dwu-kołowych robotach, a nawet elementach humanoidalnych robotów, gdzie wysoki, wąski korpus musi pozostać pionowy na poruszającej się podstawie. System jest trudny, ponieważ istnieje tylko jedna siła sterująca działająca na wózek, a jednocześnie trzeba kontrolować ruch wózka i kąt wahadła. Nawet niewielkie zmiany masy, długości czy tarcia mogą uczynić system niestabilnym, dlatego każda metoda sterowania musi nie tylko utrzymywać wahadło, lecz także pozostawać niezawodna, gdy rzeczywistość nie pokrywa się dokładnie z modelem matematycznym.
Od sztywnego sterowania do łagodniejszego naprowadzania
Inżynierowie od dawna stosują metodę zwaną sterowaniem w trybie ślizgowym do radzenia sobie z takimi niepewnymi układami. Polega ona na wymuszeniu zachowania systemu wzdłuż starannie wyznaczonej trajektorii i utrzymywaniu go tam, co czyni ją bardzo odporną na zakłócenia i błędy modelowania. Jednak metoda ta ma tendencję do gwałtownego przełączania sygnału sterującego, prowadząc do szybkich ruchów w przód i w tył zwanych drganiem (chattering). W praktyce może to marnować energię, zużywać silniki i wzbudzać niepożądane wibracje. Łagodniejsze metody oparte na logice rozmytej mogą wygładzać działanie sterowania, ale często tracą część odporności potrzebnej, gdy warunki ulegają znacznym zmianom.
Łączenie inteligentnych reguł z kontrolą odporną na zakłócenia
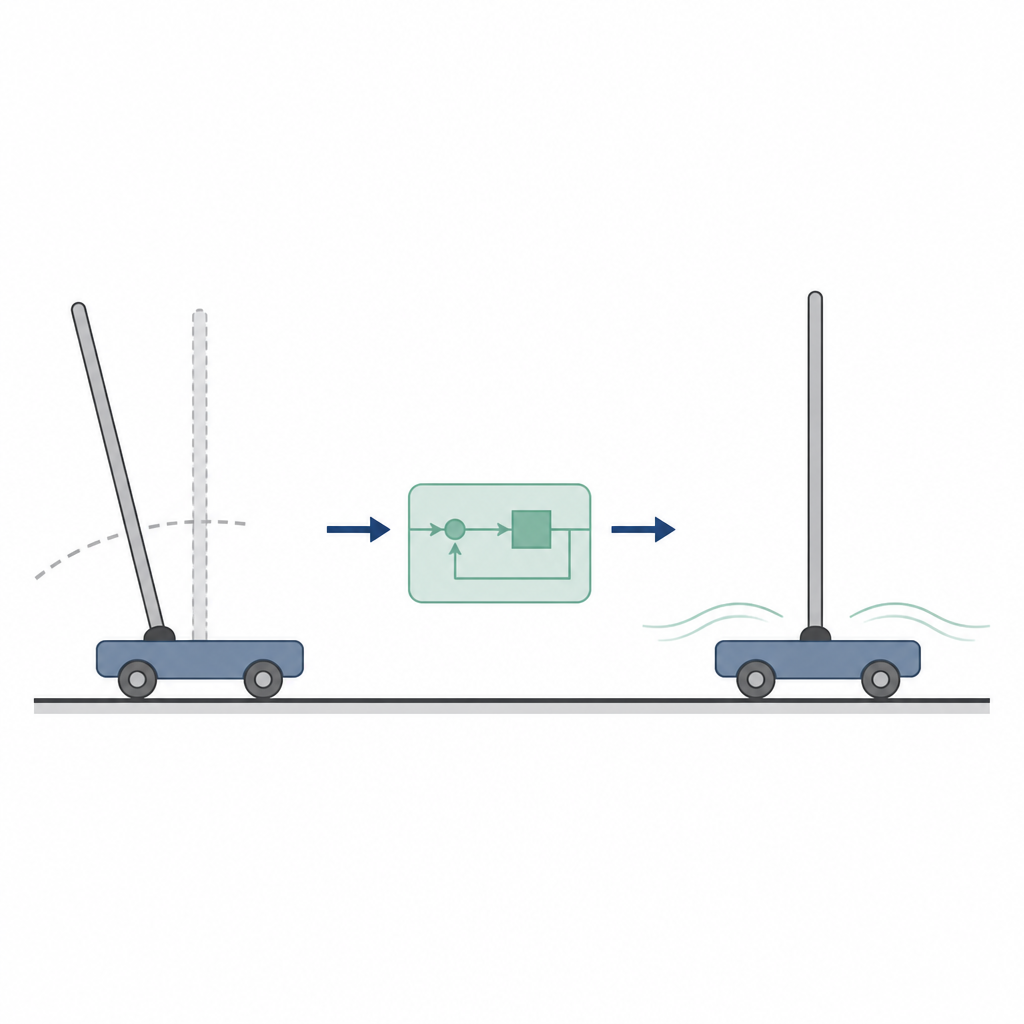
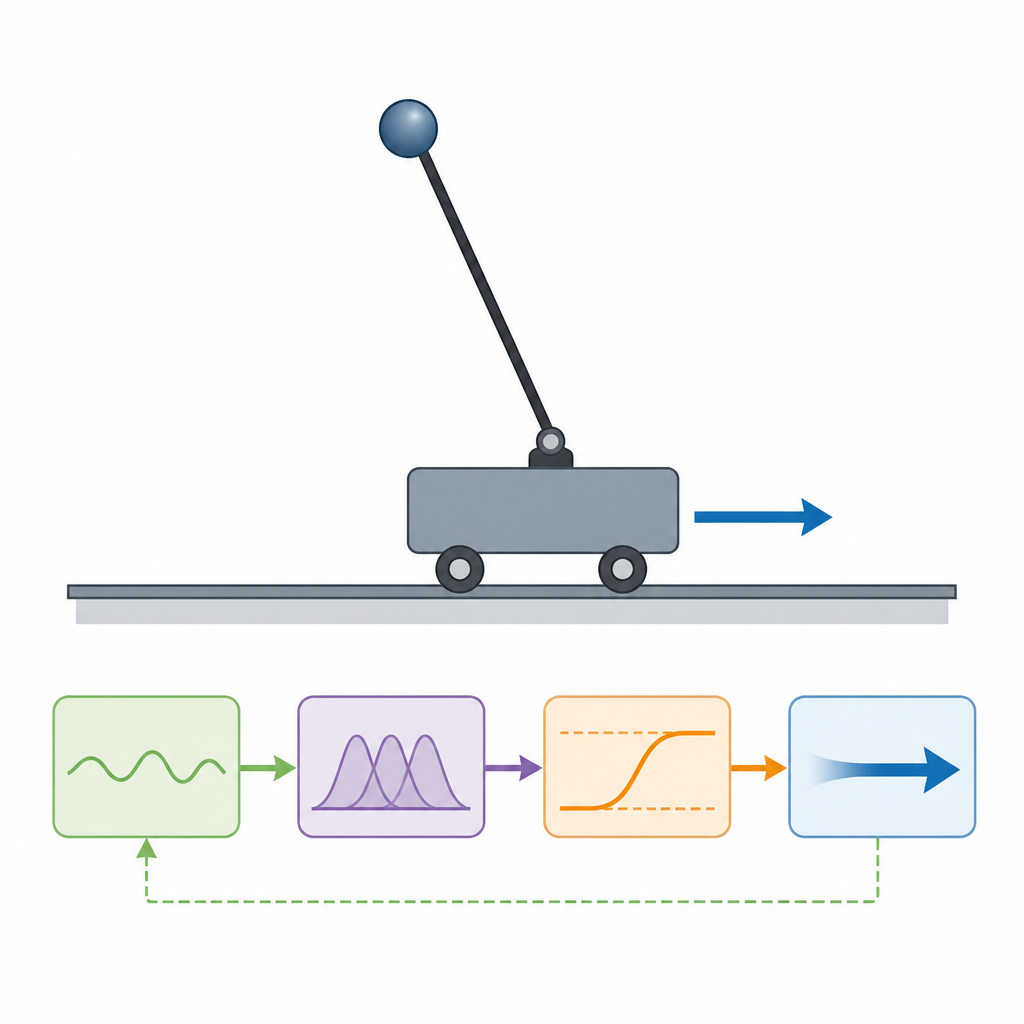
Autorzy proponują adaptacyjny rozmyty regulator w trybie ślizgowym, który łączy zalety obu podejść. Najpierw budują model matematyczny wózka z wahadłem wykorzystując standardową mechanikę, pokazując, jak pchnięcie wózka i wychylenie wahadła są ściśle powiązane. Następnie projektują wielowarstwową trajektorię docelową, czyli powierzchnię ślizgu, która priorytetyzuje utrzymanie wahadła w pionie, jednocześnie kierując wózek do pożądanej lokalizacji. Na to nakłada się system logiki rozmytej, który obserwuje, jak daleko system jest od celu i jak szybko się porusza, i wykorzystuje proste decyzje regułowe, aby zastąpić ostre przełączanie typu włącz/wyłącz łagodniejszym sygnałem. Druga warstwa rozmyta dostosowuje natężenie działania regulatora, zwiększając wysiłek, gdy wahadło odchyla się daleko od pionu, i łagodząc działanie w miarę przybliżania się do równowagi.
Jak nowy regulator zachowuje się pod obciążeniem
Naukowcy testują trzy podejścia w symulacjach komputerowych: tradycyjne sterowanie w trybie ślizgowym, jego wersję z rozmyciem oraz proponowany adaptacyjny rozmyty tryb ślizgowy. Sprawdzają wydajność w normalnych warunkach, gdy wózek otrzymuje nagłe pchnięcie, oraz gdy zmieniają masę i długość systemu, by naśladować błędy projektowe lub przesunięcia ładunku. Podstawowe podejście ślizgowe reaguje szybko, ale przeregulowuje i wykazuje silne drgania, generując bardzo duże siły sterujące. Rozmyte sterowanie ślizgowe działa płynniej, ale może stracić na dokładności przy zmianie parametrów. Adaptacyjny rozmyty regulator ślizgowy utrzymuje wahadło i wózek blisko pożądanych wartości we wszystkich scenariuszach, używając przy tym najmniejszego łącznego wysiłku sterującego i zachowując łagodne, dobrze zachowane ruchy.
Co to oznacza dla przyszłych maszyn
Mówiąc prosto, badanie pokazuje, że regulator adaptujący swoją siłę przy pomocy rozumowania przypominającego reguły rozmyte może utrzymać chwiejny system w pionie, odrzucać zakłócenia i zużywać mniej energii, wszystko bez nerwowych drgań. Automatycznie dostosowując odpowiedź w miarę wzrostu lub zmniejszania się błędów, adaptacyjny rozmyty regulator ślizgowy oferuje praktyczny przepis na pogodzenie wydajności i gładkości w urządzeniach trudnych do sterowania. Podejście to można rozszerzyć poza laboratoryjny wózek i wahadło na roboty mobilne, pojazdy powietrzne i inne układy niedostatecznie aktywowane, które muszą pozostać stabilne w zmieniającym się i niepewnym otoczeniu.
Cytowanie: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Słowa kluczowe: odwrócone wahadło, sterowanie rozmyte, sterowanie w trybie ślizgowym, sterowanie odporne, układy niedostatecznie aktywowane