Clear Sky Science · sv
Adaptiv fuzzy sliding-mode-styrning tillämpad på inverterat pendel
Balansgång med en stång på en rörlig vagn
Föreställ dig att försöka balansera en sopborste upprätt på din handflata samtidigt som du går till en bestämd plats i rummet. Du måste hindra borsten från att välta samtidigt som du för din kropp till rätt punkt, trots gupp i golvet eller ändrad vikt i borsten. Denna studie tar sig an en liknande utmaning inom teknik genom att lära en rörlig vagn att hålla en stång upprätt och förflytta sig mjukt till en målläge, allt medan energi sparas och oväntade störningar hanteras.
Varför denna balansakt är viktig
Vagnen med en upprätt pendel är ett klassiskt testsystem för svåra styrproblem. Det fångar vad som händer i raketer, tvåhjuliga robotar och till och med delar av humanoida robotar, där en hög och smal kropp måste hållas upprätt på en rörlig bas. Systemet är knepigt eftersom det bara finns en styrkraft på vagnen, men både vagnens rörelse och pendelns vinkel måste kontrolleras samtidigt. Små förändringar i massa, längd eller friktion kan göra systemet instabilt, så någon styrmetod måste inte bara balansera pendeln utan också förbli pålitlig när verkligheten inte stämmer perfekt med matematiken.
Från hård styrning till mjukare styrning
Ingenjörer har länge använt en metod kallad sliding-mode-styrning för att hantera sådana osäkra system. Den fungerar genom att tvinga systemets beteende till en noggrant vald bana och hålla det där, vilket gör den mycket robust mot störningar och modelleringsfel. Dock tenderar denna metod att växla styrsignalen abrupt, vilket leder till snabba fram-och-tillbaka-rörelser kallade chattering. I praktiken kan detta slösa energi, slita på motorer och riskera att framkalla oönskade vibrationer. Mjukare metoder som använder fuzzy-logik kan jämna ut styråtgärden, men de förlorar ofta en del av den styrka som krävs när förhållandena ändras avsevärt.
Sammansmältning av smarta regler och robust styrning
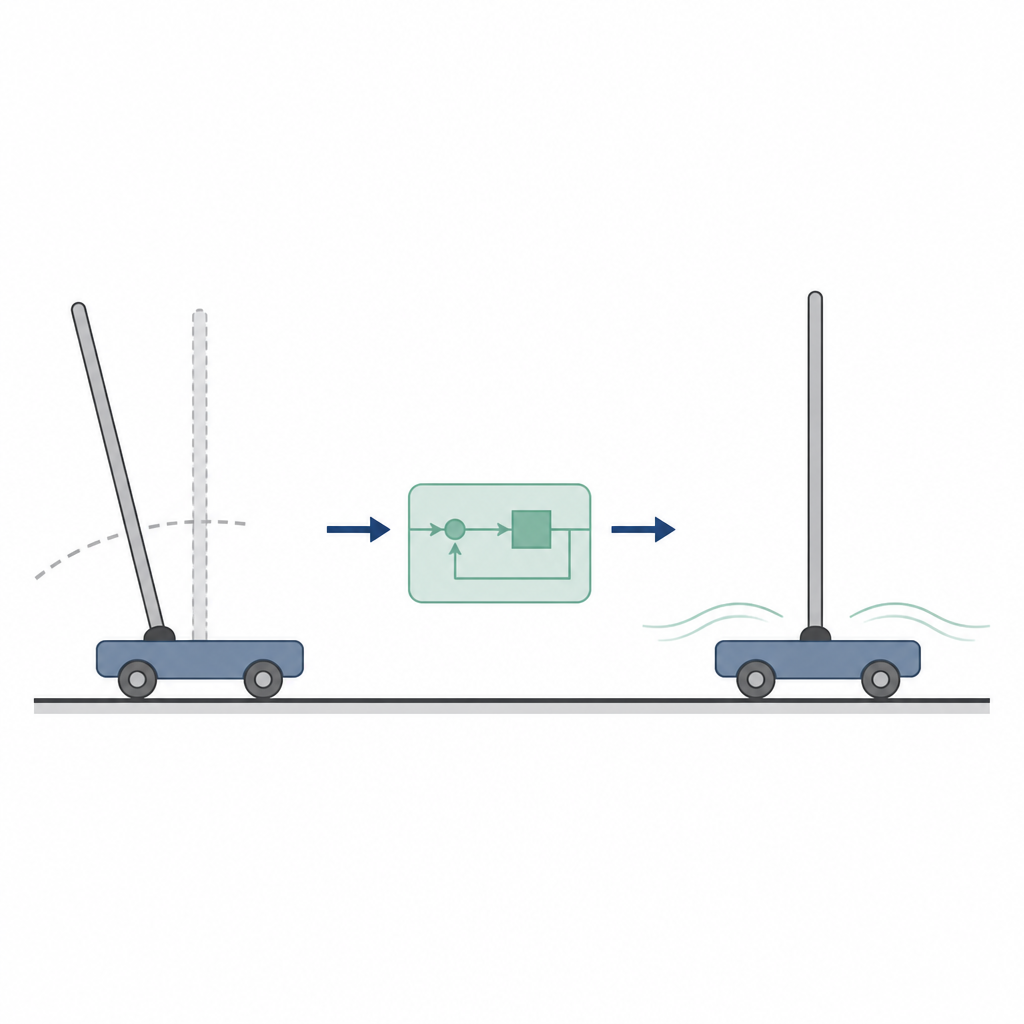
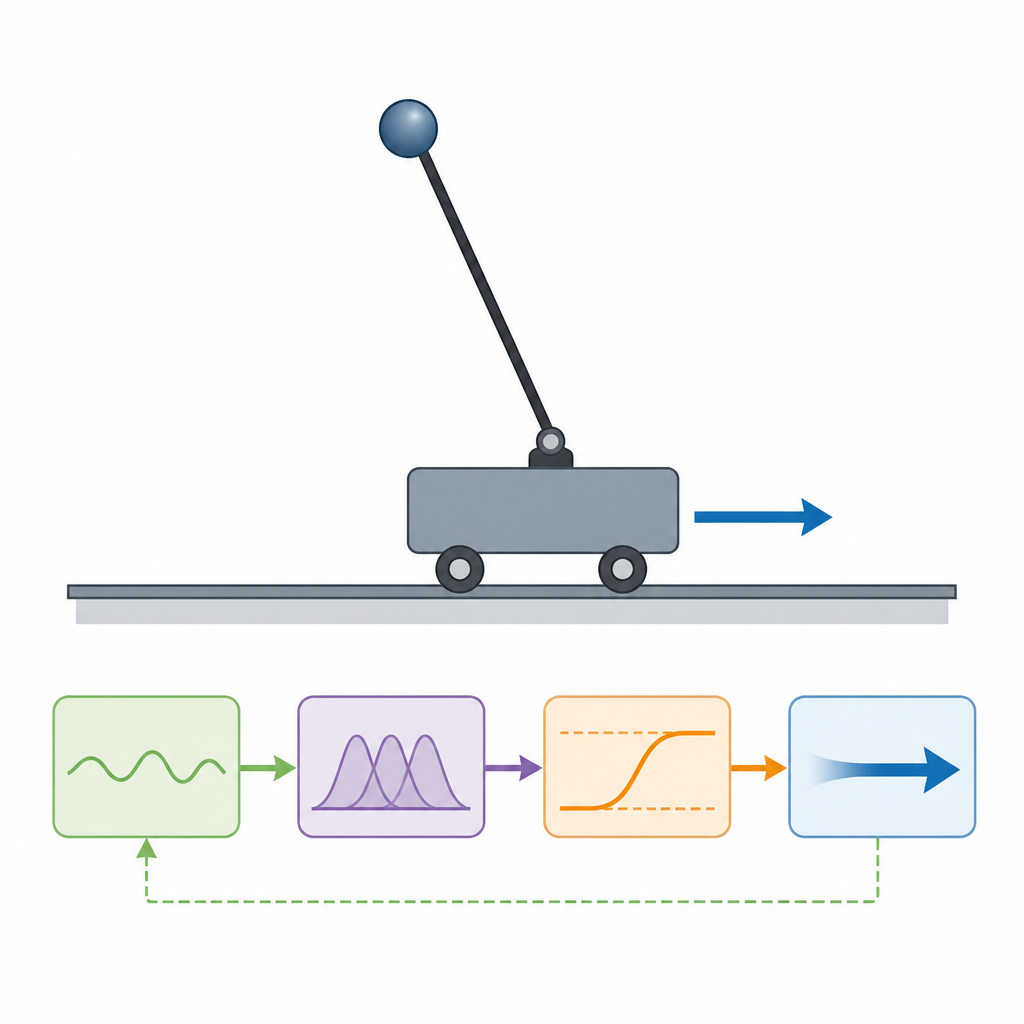
Författarna föreslår en adaptiv fuzzy sliding-mode-regulator som förenar styrkorna från båda världarna. Först bygger de en matematisk modell av vagnen och pendeln med standardmekanik, som visar hur vagnens knuff och pendelns svängning är tätt kopplade. Därefter utformar de en flerskiktad målbana, eller sliding-yta, som prioriterar att hålla pendeln upprätt samtidigt som den styr vagnen till önskat läge. Ovanpå detta observerar ett fuzzy-logiksystem hur långt systemet ligger från målet och hur snabbt det rör sig, och använder enkla regelbaserade beslut för att ersätta den skarpa av-/på-växlingen med en mjukare signal. Ett andra fuzzy-lager justerar hur starkt regulatorn ska agera, ökar insatsen när pendeln avviker mycket från upprätt läge och drar tillbaka när den närmar sig balans.
Hur den nya regulatorn beter sig under påfrestning
Forskarna testar tre metoder i datorsimuleringar: traditionell sliding-mode, en fuzzy sliding-variant och deras adaptiva fuzzy sliding-regulator. De jämför prestanda i normala förhållanden, när en plötslig knuff appliceras på vagnen, och när systemets massa och längd ändras för att efterlikna konstruktionsfel eller lastskiften. Den grundläggande sliding-metoden reagerar snabbt men överskjuter och uppvisar kraftig chattering, med mycket stora styrkrafter. Den fuzzy-baserade sliding-regulatorn körs mer mjukt men kan förlora viss noggrannhet när parametrarna förändras. Den adaptiva fuzzy sliding-regulatorn håller pendeln och vagnen nära önskade värden i alla scenarier, samtidigt som den använder minst total styrinsats och upprätthåller mjuka, väl uppförda rörelser.
Vad detta betyder för framtida maskiner
Enkelt uttryckt visar studien att en regulator som anpassar sin styrka med fuzzy-regel-liknande resonemang kan hålla ett vingligt system upprätt, avvisa störningar och använda mindre energi, allt utan nervösa ryckningar. Genom att automatiskt ställa in sin respons när felen växer eller krymper erbjuder den adaptiva fuzzy sliding-regulatorn ett praktiskt recept för att balansera prestanda och smidighet i enheter som är svåra att styra. Detta angreppssätt kan utvidgas bortom laboratorievagnen och pendeln till mobila robotar, luftfarkoster och andra underaktuerade maskiner som måste vara stabila i en föränderlig och osäker omvärld.
Citering: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Nyckelord: inverterad pendel, fuzzy-styrning, sliding-mode-styrning, robust styrning, underaktuerade system