Clear Sky Science · nl
Aanpasbare fuzzy sliding-moderegelaar toegepast op een omgekeerde slinger
Een stok in balans houden op een bewegend wagentje
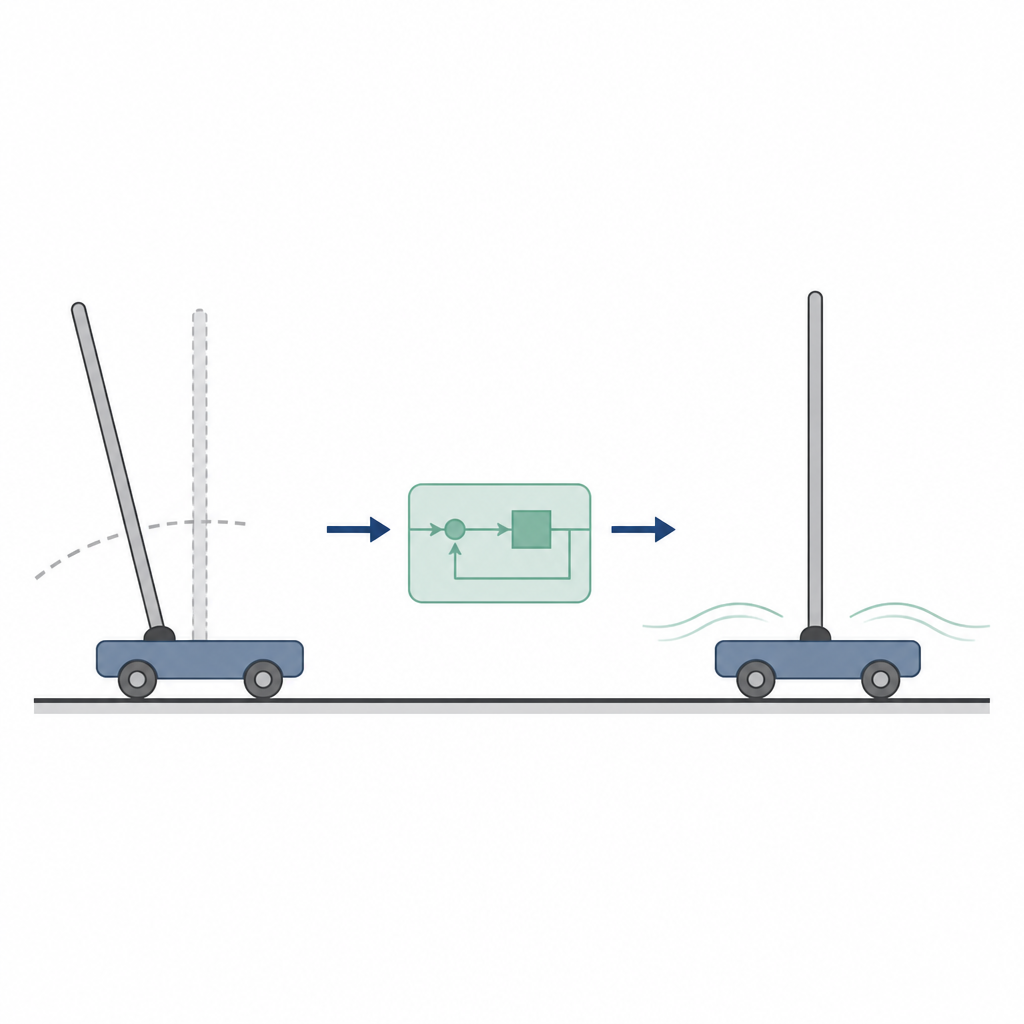
Stel je voor dat je probeert een bezem rechtop op je handpalm te balanceren terwijl je naar een specifieke plek in de kamer loopt. Je moet de bezem tegen het omvallen houden terwijl je je lichaam naar de juiste plaats beweegt, ondanks hobbels in de vloer of veranderingen in het gewicht van de bezem. Deze studie pakt een vergelijkbare uitdaging in de techniek aan door een rijdend wagentje te leren een staaf rechtop te houden en soepel naar een doelpositie te bewegen, terwijl het energie spaart en onverwachte gebeurtenissen afhandelt.
Waarom deze balanstaak belangrijk is
Het wagentje met een rechtopstaande slinger is een klassiek toetsgeval voor moeilijke regelproblemen. Het vat samen wat er gebeurt in raketten, tweetonige robots en zelfs delen van humanoïde robots, waar een lange, smalle massa rechtop moet blijven op een bewegende basis. Het systeem is lastig omdat er maar één regelkracht op het wagentje werkt, terwijl zowel de beweging van het wagentje als de hoek van de slinger gelijktijdig beheerd moeten worden. Kleine veranderingen in massa, lengte of wrijving kunnen het systeem instabiel maken, dus elke regelmethode moet niet alleen de slinger in balans houden maar ook betrouwbaar blijven wanneer de echte wereld niet precies overeenkomt met de wiskunde.
Van stug regelen naar soepeler sturen
Ingenieurs gebruiken al lange tijd een methode die sliding-mode regeling wordt genoemd om met zulke onzekere systemen om te gaan. Het werkt door het gedrag van het systeem op een zorgvuldig gekozen pad te dwingen en daar te houden, wat het zeer robuust maakt tegen verstoringen en modelleerfouten. Deze methode schakelt echter vaak abrupt de regelactie, wat leidt tot snelle heen en weer bewegingen, chattering genoemd. In de praktijk kan dit energie verspillen, motoren slijten en ongewenste trillingen opwekken. Zachtere methoden met fuzzy-logica kunnen de regeling afvlakken, maar verliezen vaak een deel van de stevigheid die nodig is wanneer de omstandigheden sterk veranderen.
Slimme regels combineren met robuuste regeling
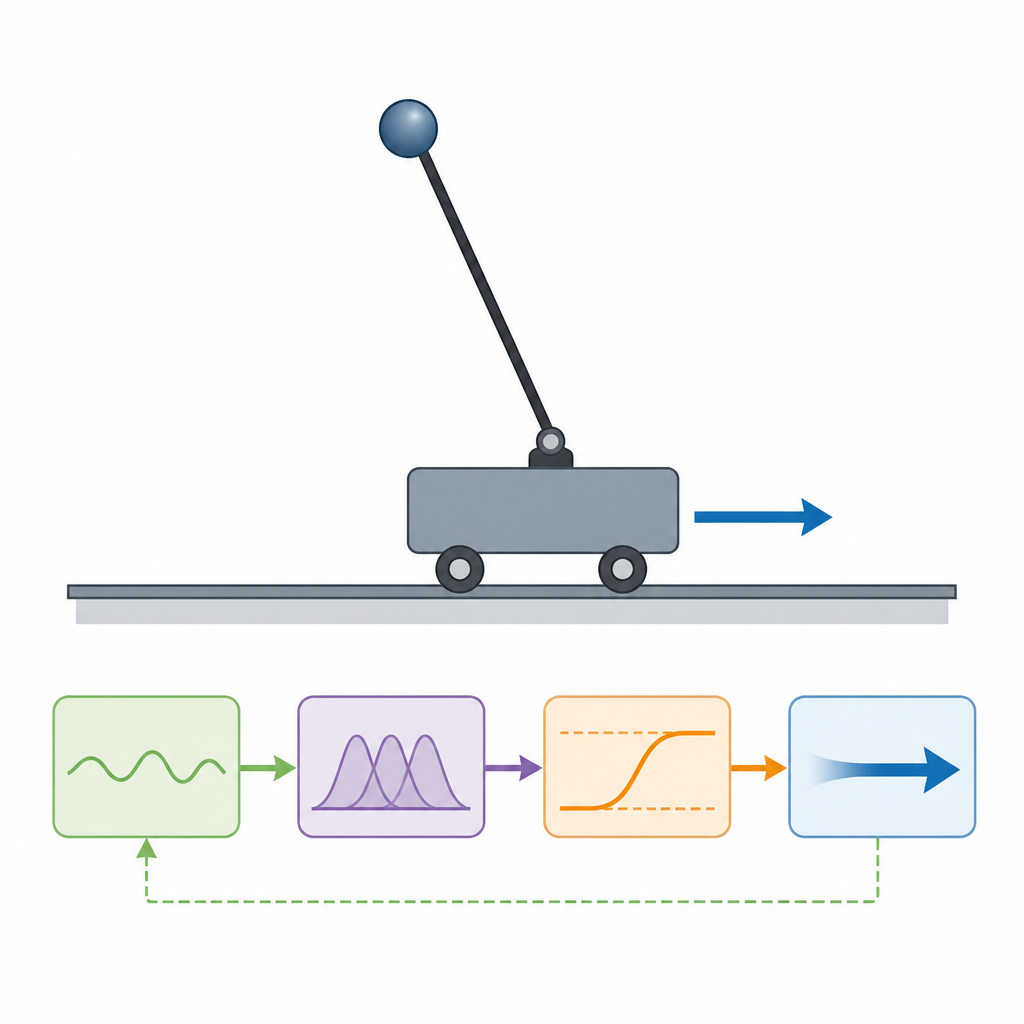
De auteurs stellen een aanpasbare fuzzy sliding-moderegelaar voor die de sterke punten van beide werelden combineert. Eerst bouwen ze een wiskundig model van het wagentje en de slinger met standaardmechanica, waarbij ze laten zien hoe de duwkracht van het wagentje en de zwaai van de slinger nauw verbonden zijn. Vervolgens ontwerpen ze een gelaagd doelpad, of sliding-oppervlak, dat prioriteit geeft aan het rechtop houden van de slinger terwijl het wagentje naar de gewenste locatie wordt gestuurd. Daarbovenop observeert een fuzzy-logicasysteem hoe ver het systeem van het doel afligt en hoe snel het beweegt, en gebruikt eenvoudige regelachtige beslissingen om het harde aan/uit schakelen te vervangen door een soepelere signaalvorm. Een tweede fuzzy-laag past aan hoe sterk de regelaar moet optreden, verhoogt de inspanning wanneer de slinger ver van rechtop afwijkt en vermindert die weer naarmate hij dichter bij balans komt.
Gedrag van de nieuwe regelaar onder stress
De onderzoekers testen drie benaderingen in computersimulaties: de traditionele sliding-mode methode, een fuzzy-sliding versie en hun aanpasbare fuzzy-sliding regelaar. Ze beoordelen de prestaties onder normale omstandigheden, wanneer een plotselinge duw op het wagentje wordt gegeven, en wanneer de massa en lengte van het systeem worden gewijzigd om ontwerpafwijkingen of payloadverschuivingen te simuleren. De basale sliding-aanpak reageert snel maar overschiet en vertoont sterke chattering, met zeer grote regelkrachten. De fuzzy-sliding regelaar werkt vloeiender maar kan wat precisie verliezen wanneer de parameters veranderen. De aanpasbare fuzzy-sliding regelaar houdt de slinger en het wagentje onder alle scenario’s dicht bij de gewenste waarden, terwijl hij het totale regelarbeid minimaliseert en zachte, goedgedragende bewegingen behoudt.
Wat dit betekent voor toekomstige machines
In eenvoudige termen toont de studie aan dat een regelaar die zijn sterkte aanpast met behulp van fuzzy regelachtige redenering een wiebelig systeem rechtop kan houden, verstoringen kan onderdrukken en minder energie kan gebruiken, zonder zenuwtrekkingen. Door zijn reactie automatisch bij te sturen naarmate fouten groter of kleiner worden, biedt de aanpasbare fuzzy-sliding regelaar een praktische methode om prestaties en soepelheid in evenwicht te brengen voor apparaten die moeilijk te regelen zijn. Deze aanpak kan worden uitgebreid buiten het laboratoriumwagentje en de slinger naar mobiele robots, luchtvaartuigen en andere onderaangedreven machines die stabiel moeten blijven in een veranderende en onzekere omgeving.
Bronvermelding: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Trefwoorden: omgekeerde slinger, fuzzy-regeling, sliding-mode regeling, robuuste regeling, onderaangedreven systemen