Clear Sky Science · tr
Ters salıncak üzerine uygulanan uyarlanabilir bulanık kayma modu denetimi
Hareketli bir arabada çubuğu dengede tutmak
Bir süpürgeyi avucunuzun üzerinde dik tutmaya çalışırken aynı anda odanın karşısındaki belirli bir noktaya yürümeyi hayal edin. Süpürgenin devrilmesini engellerken vücudunuzu doğru yere yönlendirmeniz gerekir; zemindeki tümseklere veya süpürgenin ağırlığındaki değişimlere rağmen. Bu çalışma, mühendislikte benzer bir zorluğu ele alarak hareketli bir arabanın bir çubuğu dik tutmayı ve hedef konuma düzgünce hareket etmeyi öğrenmesini—aynı zamanda enerji tasarrufu yapıp beklenmedik durumlarla başa çıkmasını—sağlıyor.
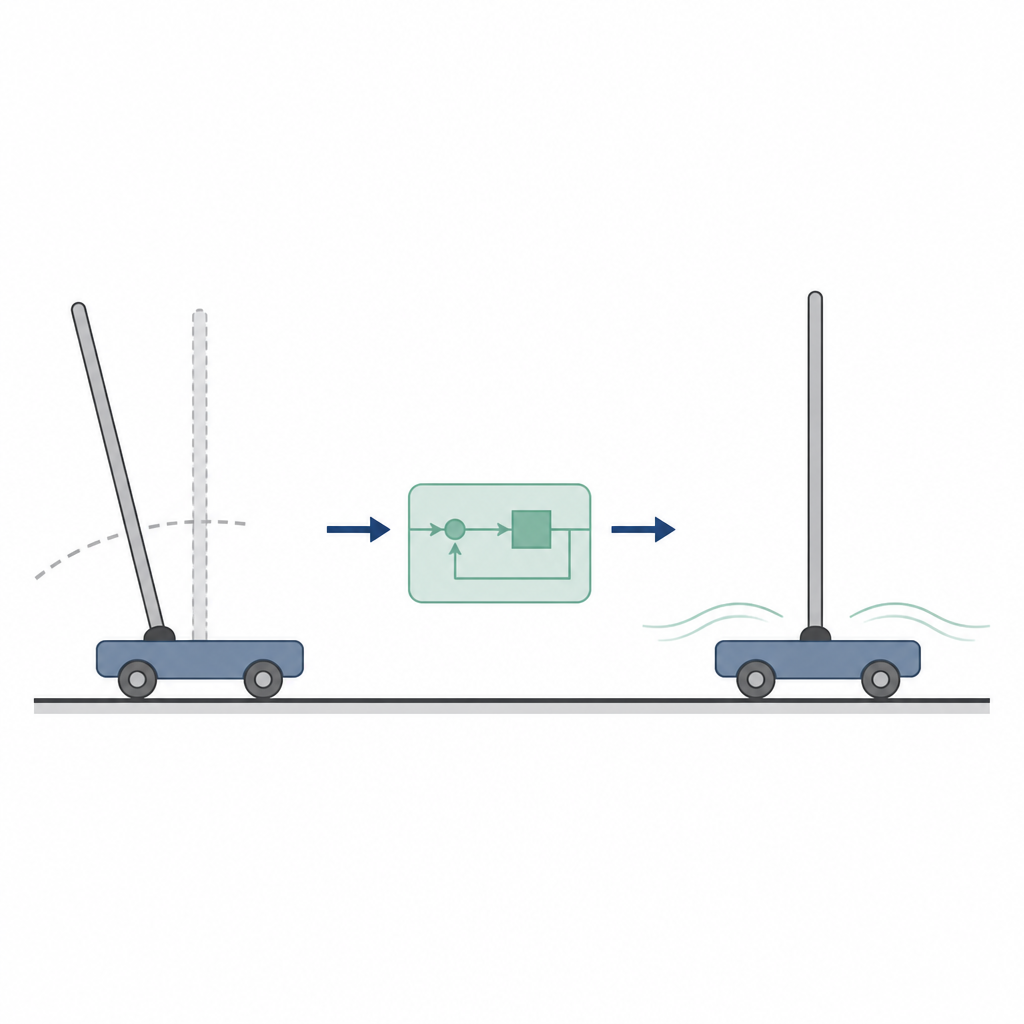
Bu denge oyununun önemi
Dik bir salıncağa sahip araba klasik ve zorlu bir denetim sınama durumudur. Roketlerde, iki tekerlekli robotlarda ve hatta insansı robotların bazı kısımlarında görüldüğü gibi, uzun ve dar bir gövdenin hareketli bir taban üzerinde dik kalması gereken durumları yakalar. Sistem, arabanın üzerinde yalnızca tek bir kontrol kuvveti olduğu halde hem arabanın hareketi hem de salıncağın açısının aynı anda yönetilmesi gerektiği için zorludur. Kütle, uzunluk veya sürtünmedeki küçük değişiklikler sistemi kararsız hale getirebilir; bu yüzden herhangi bir denetim yöntemi yalnızca salıncağı dengelemekle kalmamalı, aynı zamanda gerçek dünya matematiğe tam uymadığında da güvenilir olmalıdır.
Sert denetimden daha yumuşak yönlendirmeye
Mühendisler, belirsiz sistemleri ele almak için uzun süredir kayma modu denetimi adı verilen bir yöntemi kullanıyor. Bu yöntem, sistemin davranışını dikkatle seçilmiş bir yola zorlayıp orada tutarak bozulmalara ve modelleme hatalarına karşı çok sağlam olmasını sağlar. Ancak bu yöntem genellikle kontrol sinyalini ani olarak değiştirir ve chattering (titreşimli/sıçrama) denilen hızlı ileri geri hareketlere yol açar. Pratikte bu durum enerji israfına, motorların aşınmasına ve istenmeyen titreşimlerin harekete geçmesine neden olabilir. Bulanık mantık kullanan daha yumuşak yöntemler kontrol eylemini düzleştirebilir, ancak koşullar önemli ölçüde değiştiğinde gereken sertliği kısmen kaybedebilirler.
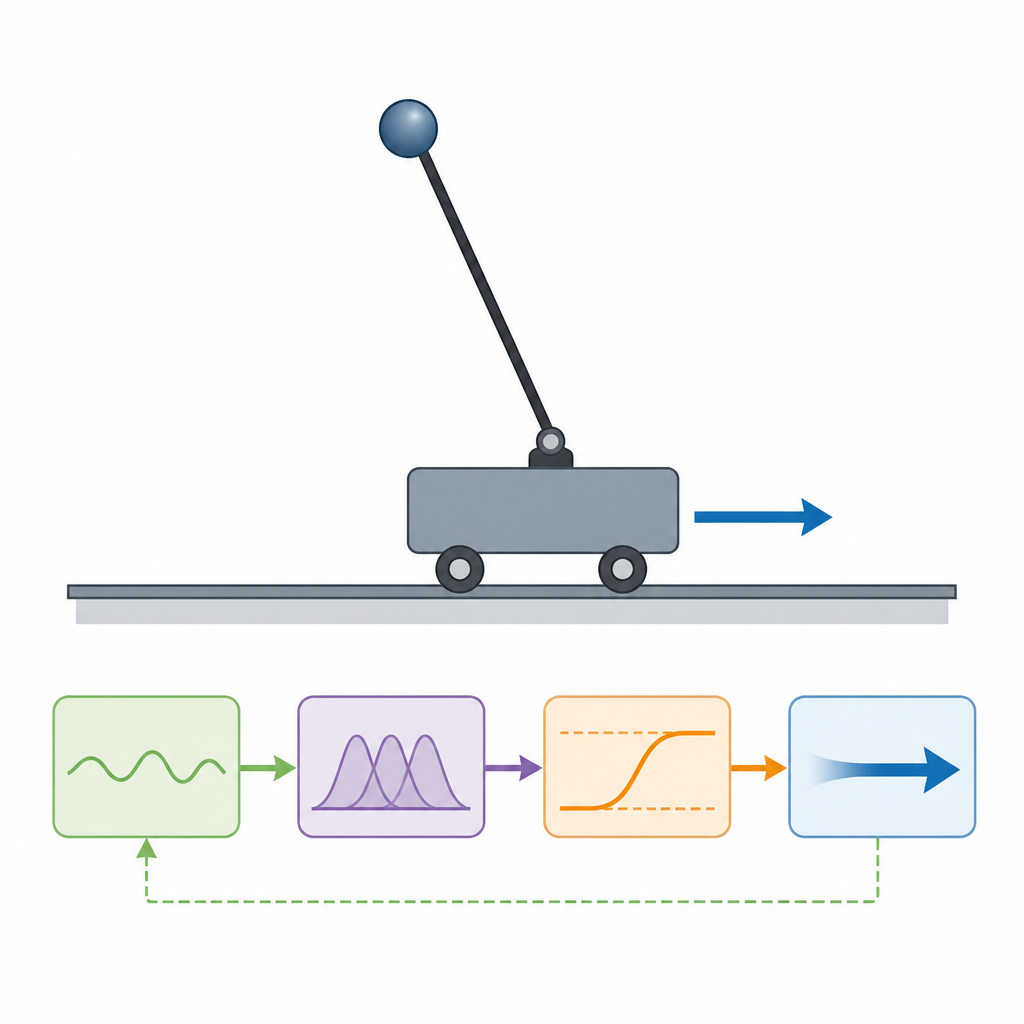
Akıllı kuralları sağlam denetimle harmanlamak
Yazarlar, her iki dünyanın güçlü yönlerini harmanlayan uyarlanabilir bulanık kayma modu denetleyicisini öneriyor. Öncelikle, arabanın itişi ile salıncağın sallanması arasındaki sıkı bağlantıyı gösteren standart mekaniği kullanarak araba ve salıncağın matematiksel modelini kuruyorlar. Ardından, salıncağın dik tutulmasına öncelik verirken aynı zamanda arabayı istenen konumuna yönlendirecek katmanlı bir hedef yol (kayma yüzeyi) tasarlıyorlar. Bunun üzerine gelen bulanık mantık sistemi, sistemin hedeften ne kadar uzak olduğunu ve ne kadar hızlı hareket ettiğini gözlemliyor ve kaba aç-kapa anahtarlamayı daha yumuşak bir sinyalle değiştirmek için basit kural benzeri kararlar kullanıyor. İkinci bir bulanık katman, denetleyicinin ne kadar güçlü olması gerektiğini ayarlayarak salıncak dikliğinden uzaklaştığında çabayı artırıyor ve dengeye yaklaştıkça gevşetiyor.
Yeni denetleyici stres altında nasıl davranıyor
Araştırmacılar bilgisayar simülasyonlarında üç yaklaşımı test ediyor: geleneksel kayma modu yöntemi, bulanık kayma versiyonu ve onların uyarlanabilir bulanık kayma denetleyicisi. Normal koşullarda, arabaya ani bir itiş uygulandığında ve sistemin kütle ve uzunluğu tasarım hatalarını veya yük değişimlerini taklit edecek şekilde değiştirildiğinde performansı kontrol ediyorlar. Temel kayma yaklaşımı hızlı tepki veriyor ancak aşırı sapma ve güçlü chattering gösteriyor; kontrol kuvvetleri çok büyük oluyor. Bulanık kayma denetleyicisi daha düzgün çalışıyor ancak parametreler değiştiğinde bir miktar doğruluk kaybedebiliyor. Uyarlanabilir bulanık kayma denetleyicisi, tüm senaryolarda salıncağı ve arabayı istenen değerlere yakın tutarken en düşük toplam kontrol çabasını kullanıyor ve nazik, iyi davrandığı görülen hareketleri koruyor.
Geleceğin makineleri için bunun anlamı
Basitçe söylemek gerekirse, çalışma, bulanık kural benzeri akıl yürütmeyle gücünü uyarlayan bir denetleyicinin sallantılı bir sistemi dik tutabileceğini, bozulmaları reddedebileceğini ve sinirli sıçramalar olmadan daha az enerji kullanabileceğini gösteriyor. Hatalar büyüdükçe veya küçüldükçe tepkisini otomatik olarak ayarlayarak, uyarlanabilir bulanık kayma denetleyicisi kontrolü zor cihazlarda performans ile düzgünlük arasında pratik bir denge sunuyor. Bu yaklaşım laboratuvar arabası ve salıncağın ötesine, mobil robotlara, hava araçlarına ve değişen belirsiz bir dünyada kararlı kalması gereken diğer eksik-etkisiz makinelere genişletilebilir.
Atıf: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Anahtar kelimeler: ters salıncak, bulanık denetim, kayma modu denetimi, sağlam denetim, eksik-etkisiz sistemler