Clear Sky Science · es
Control por modo deslizante difuso adaptativo aplicado al péndulo invertido
Equilibrar una barra sobre un carro en movimiento
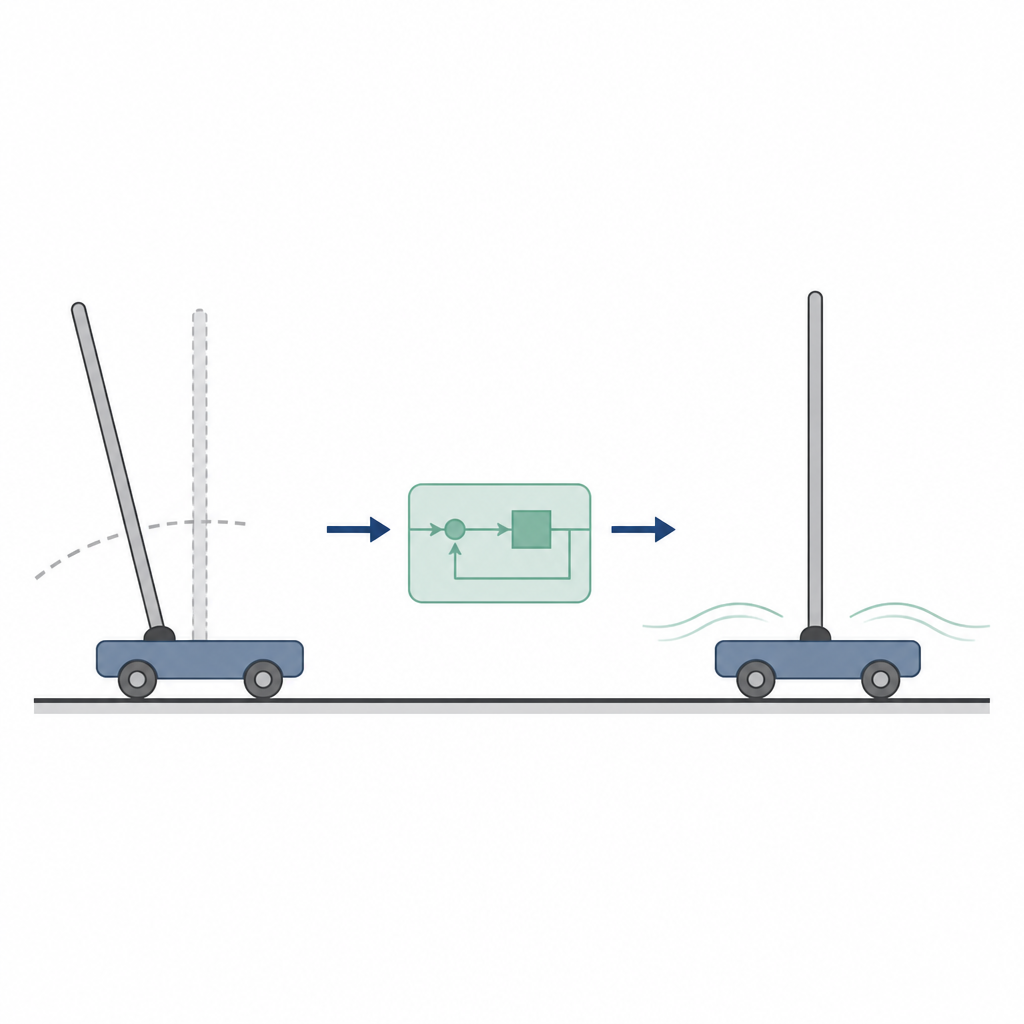
Imagínese intentando mantener una escoba vertical en la palma mientras camina hacia un punto determinado de la habitación. Debe evitar que la escoba se vuelque al mismo tiempo que guía su cuerpo al lugar correcto, pese a baches en el suelo o cambios en el peso de la escoba. Este estudio aborda un desafío similar en ingeniería al enseñar a un carro móvil a mantener una varilla erguida y desplazarse suavemente hasta una posición objetivo, todo ello ahorrando energía y gestionando imprevistos.
Por qué importa este equilibrio
El carro con un péndulo vertical es un caso de prueba clásico para problemas de control difíciles. Resume lo que ocurre en cohetes, robots de dos ruedas e incluso en partes de robots humanoides, donde un cuerpo alto y estrecho debe mantenerse erguido sobre una base móvil. El sistema es complejo porque sólo hay una fuerza de control sobre el carro, y aun así deben gestionarse al mismo tiempo el movimiento del carro y el ángulo del péndulo. Pequeños cambios en la masa, la longitud o la fricción pueden desestabilizar el sistema, por lo que cualquier método de control debe no sólo equilibrar el péndulo, sino también seguir siendo fiable cuando el mundo real no coincide exactamente con las ecuaciones.
De un control brusco a una dirección más suave
Los ingenieros llevan tiempo usando un método llamado control por modo deslizante para manejar sistemas con incertidumbre. Funciona forzando el comportamiento del sistema sobre una trayectoria cuidadosamente elegida y manteniéndolo ahí, lo que lo hace muy robusto frente a perturbaciones y errores de modelado. Sin embargo, este método tiende a cambiar la señal de control de forma abrupta, provocando oscilaciones rápidas denominadas chatter. En la práctica, esto puede desperdiciar energía, desgastar los motores y excitar vibraciones no deseadas. Métodos más suaves basados en lógica difusa pueden suavizar la acción de control, pero a menudo pierden parte de la dureza necesaria cuando las condiciones cambian significativamente.
Combinando reglas inteligentes con control robusto
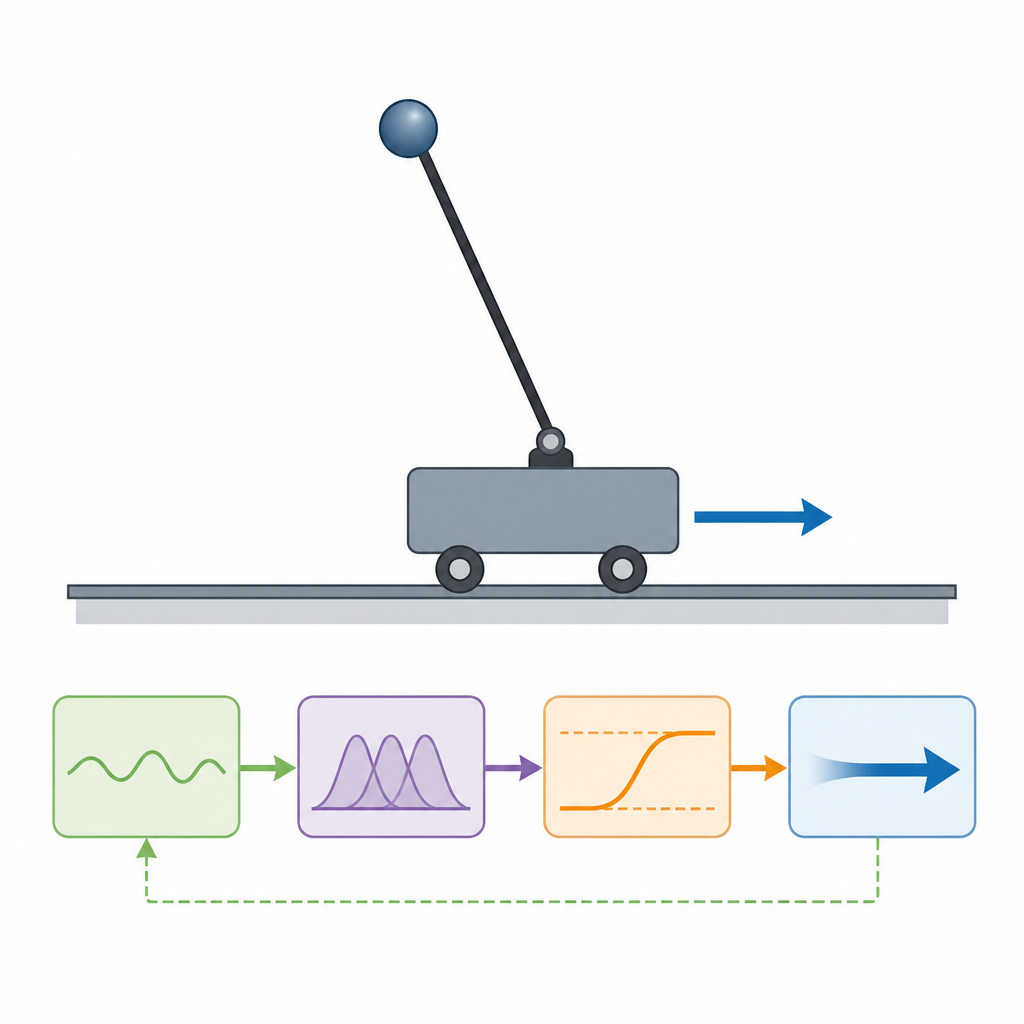
Los autores proponen un controlador por modo deslizante difuso adaptativo que combina las fortalezas de ambos enfoques. Primero, construyen un modelo matemático del carro y el péndulo usando mecánica estándar, mostrando cómo el empuje del carro y el balanceo del péndulo están estrechamente ligados. Luego diseñan una trayectoria objetivo por capas, o superficie de deslizamiento, que da prioridad a mantener el péndulo erguido mientras también dirige el carro hacia su ubicación deseada. Encima de esto, un sistema de lógica difusa observa qué tan lejos está el sistema de su objetivo y qué rapidez se mueve, y utiliza decisiones simples tipo regla para sustituir el conmutado brusco por una señal más suave. Una segunda capa difusa ajusta la intensidad con la que debe actuar el controlador, incrementando el esfuerzo cuando el péndulo se aleja mucho de la vertical y reduciéndolo a medida que se acerca al equilibrio.
Cómo se comporta el nuevo controlador bajo estrés
Los investigadores prueban tres enfoques en simulaciones por ordenador: el método clásico de modo deslizante, una versión difusa del modo deslizante y su controlador difuso adaptativo. Evalúan el rendimiento en condiciones normales, cuando se aplica un empujón repentino al carro y cuando se cambian la masa y la longitud para imitar errores de diseño o variaciones de carga. El enfoque por modo deslizante básico responde rápidamente pero sobrerreacciona y muestra fuerte chatter, con fuerzas de control muy elevadas. El controlador difuso deslizante actúa de forma más suave pero puede perder algo de precisión cuando los parámetros varían. El controlador difuso adaptativo mantiene el péndulo y el carro cerca de sus valores deseados en todos los escenarios, usando además el menor esfuerzo de control global y manteniendo movimientos suaves y bien comportados.
Qué significa esto para máquinas del futuro
En términos sencillos, el estudio muestra que un controlador que adapta su intensidad mediante razonamiento tipo reglas difusas puede mantener un sistema inestable en posición vertical, rechazar perturbaciones y consumir menos energía, todo ello sin producir sacudidas nerviosas. Al ajustar automáticamente su respuesta a medida que los errores crecen o disminuyen, el controlador por modo deslizante difuso adaptativo ofrece una receta práctica para equilibrar rendimiento y suavidad en dispositivos difíciles de controlar. Este enfoque puede extenderse más allá del carro y péndulo de laboratorio a robots móviles, vehículos aéreos y otras máquinas subactuadas que deben mantenerse estables en un mundo cambiante e incierto.
Cita: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Palabras clave: péndulo invertido, control difuso, control por modo deslizante, control robusto, sistemas subactuados