Clear Sky Science · it
Controllo adattivo fuzzy a scorrimento applicato al pendolo invertito
Equilibrare un’asta su un carrello in movimento
Immagina di cercare di tenere in equilibrio una scopa in verticale sul palmo mentre cammini verso un punto nella stanza. Devi impedire che la scopa cada mantenendo al contempo il corpo nella posizione giusta, nonostante buche nel pavimento o cambiamenti di peso della scopa. Questo studio affronta una sfida analoga nell’ingegneria insegnando a un carrello in movimento a mantenere un’asta in posizione verticale e a spostarsi dolcemente verso una posizione target, il tutto risparmiando energia e gestendo imprevisti.
Perché questo equilibrio è importante
Il carrello con pendolo verticale è un caso di prova classico per problemi di controllo difficili. Riproduce ciò che avviene nei razzi, nei robot a due ruote e persino in parti di robot umanoidi, dove un corpo alto e stretto deve restare in piedi su una base in movimento. Il sistema è complicato perché c’è una sola forza di controllo sul carrello, eppure vanno gestiti sia il movimento del carrello sia l’angolo del pendolo. Piccole variazioni di massa, lunghezza o attrito possono rendere il sistema instabile, quindi qualsiasi metodo di controllo deve non solo bilanciare il pendolo ma anche rimanere affidabile quando il mondo reale non corrisponde perfettamente ai modelli matematici.
Dal controllo rigido a una guida più morbida
Gli ingegneri hanno a lungo usato un metodo chiamato controllo a scorrimento per gestire sistemi incerti di questo tipo. Funziona forzando il comportamento del sistema su una traiettoria opportunamente scelta e mantenendolo lì, il che lo rende molto robusto alle perturbazioni e agli errori di modellazione. Tuttavia, questo metodo tende a commutare il segnale di controllo bruscamente, causando rapidi movimenti di avanti e indietro chiamati chattering. In pratica, questo può sprecare energia, consumare i motori e rischiare di eccitare vibrazioni indesiderate. Metodi più morbidi che usano la logica fuzzy possono smussare l’azione di controllo, ma spesso perdono parte della robustezza necessaria quando le condizioni cambiano significativamente.
Fondere regole intelligenti con controllo robusto
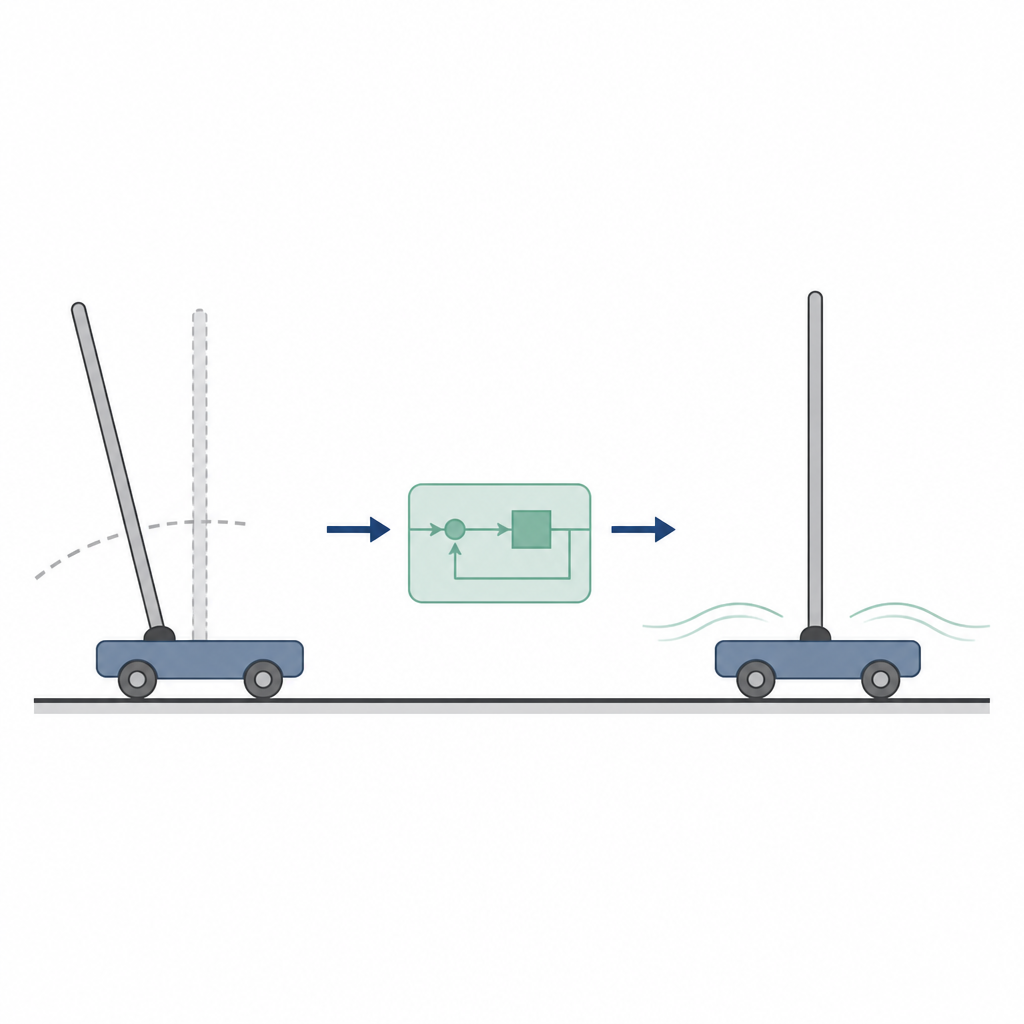
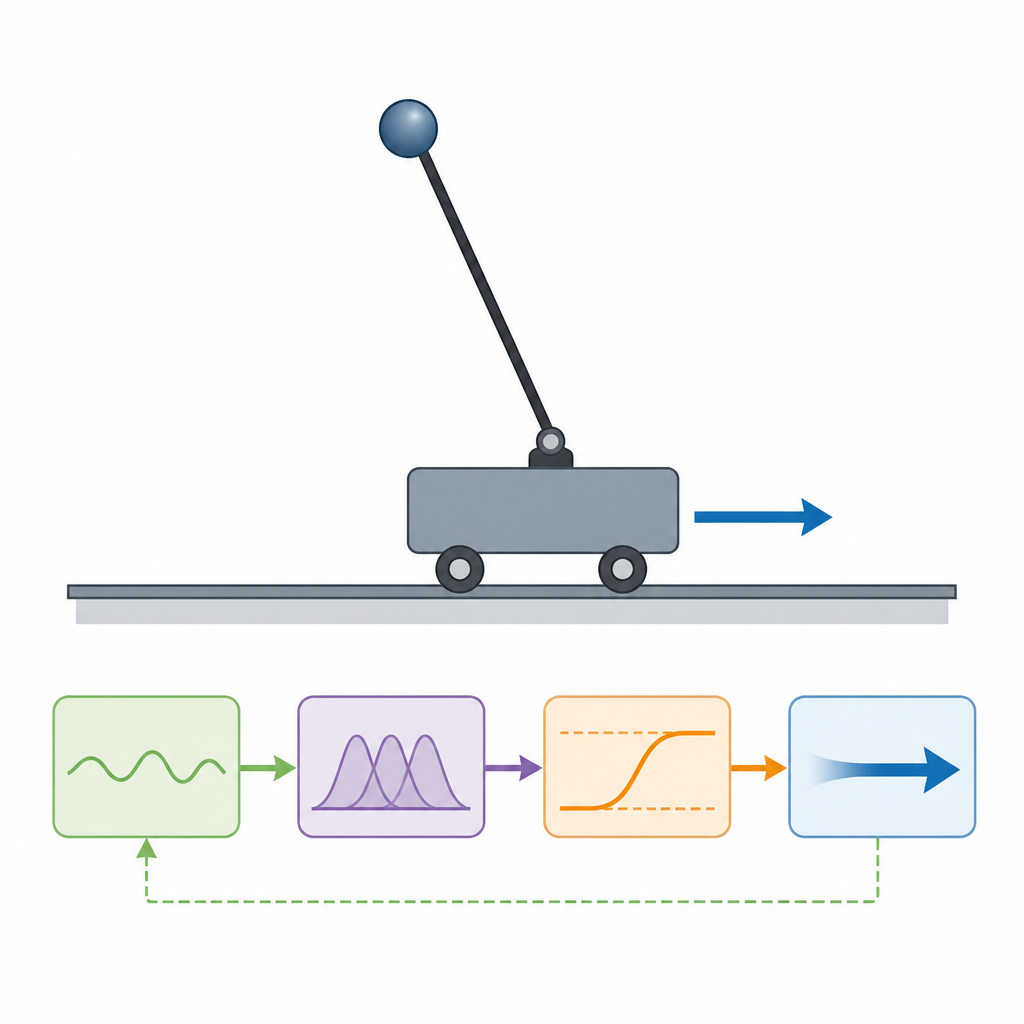
Gli autori propongono un controllore adattivo fuzzy a scorrimento che combina i punti di forza di entrambi gli approcci. Prima costruiscono un modello matematico del carrello e del pendolo usando la meccanica standard, mostrando come la spinta del carrello e l’oscillazione del pendolo siano strettamente collegate. Poi progettano una traiettoria a strati, o superficie di scorrimento, che dà priorità al mantenimento dell’asta in verticale pur guidando il carrello verso la posizione desiderata. Su questo strato, un sistema fuzzy osserva quanto il sistema sia lontano dall’obiettivo e quanto velocemente si muove, e usa semplici decisioni di tipo rule-like per sostituire la commutazione brusca on/off con un segnale più fluido. Un secondo strato fuzzy regola quanto forte il controllore debba agire, aumentando l’intervento quando il pendolo si discosta molto dalla verticale e attenuando l’azione man mano che si avvicina all’equilibrio.
Come si comporta il nuovo controllore sotto stress
I ricercatori testano tre approcci in simulazioni al computer: il metodo tradizionale a scorrimento, una versione fuzzy a scorrimento e il loro controllore adattivo fuzzy a scorrimento. Verificano le prestazioni in condizioni normali, quando viene applicata una spinta improvvisa al carrello e quando si cambiano massa e lunghezza per simulare errori di progettazione o variazioni di carico. L’approccio a scorrimento di base risponde rapidamente ma sovraelonga e mostra forte chattering, con forze di controllo molto elevate. Il controllore fuzzy a scorrimento opera in modo più fluido ma può perdere un po’ di accuratezza quando i parametri cambiano. Il controllore adattivo fuzzy a scorrimento mantiene pendolo e carrello vicini ai valori desiderati in tutti gli scenari, usando nel complesso il minor sforzo di controllo e mantenendo movimenti gentili e ben comportati.
Cosa significa per le macchine del futuro
In termini semplici, lo studio mostra che un controllore che adatta la sua intensità usando ragionamenti di tipo fuzzy può mantenere un sistema instabile in posizione verticale, respingere le perturbazioni e consumare meno energia, il tutto senza tremori nervosi. Regolando automaticamente la risposta man mano che l’errore cresce o diminuisce, il controllore adattivo fuzzy a scorrimento offre una ricetta pratica per bilanciare prestazioni e morbidezza in dispositivi difficili da controllare. Questo approccio può essere esteso oltre il carrello e il pendolo di laboratorio a robot mobili, veicoli aerei e altre macchine sottodeterminate che devono restare stabili in un mondo incerto e in evoluzione.
Citazione: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Parole chiave: pendolo invertito, controllo fuzzy, controllo a scorrimento, controllo robusto, sistemi sottodeterminati