Clear Sky Science · fr
Commande adaptative floue à mode glissant appliquée au pendule inversé
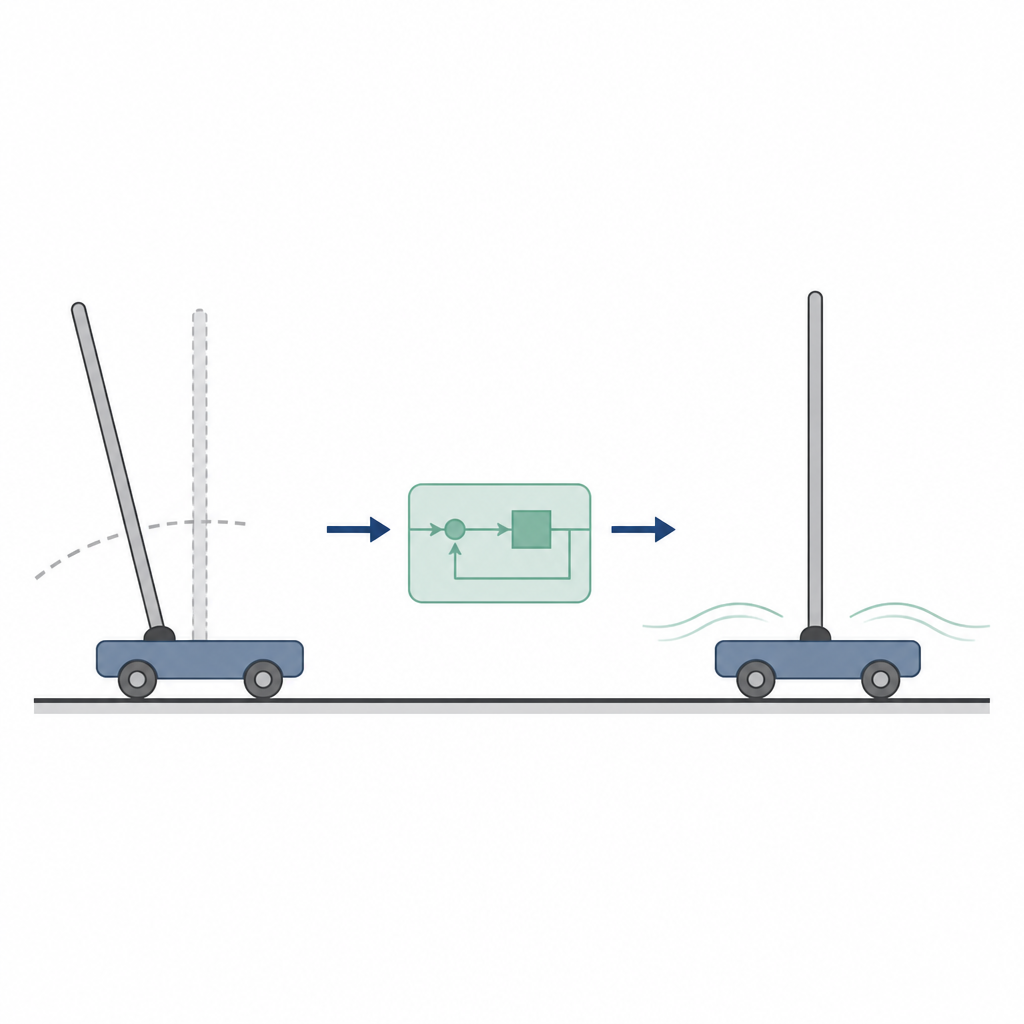
Faire tenir un bâton en équilibre sur un chariot mobile
Imaginez essayer de maintenir un balai en position verticale sur votre paume tout en vous rendant à un endroit précis de la pièce. Il faut empêcher le balai de basculer tout en guidant votre corps vers la bonne position, malgré les bosses du sol ou des variations de masse du balai. Cette étude s’attaque à un défi similaire en ingénierie en apprenant à un chariot mobile à garder une tige droite et à se déplacer en douceur vers une position cible, tout en économisant de l’énergie et en gérant les imprévus.
Pourquoi cet exercice d’équilibre est important
Le chariot avec un pendule vertical est un banc d’essai classique pour les problèmes de commande difficiles. Il reflète ce qui se passe dans les fusées, les robots à deux roues et même certaines parties des robots humanoïdes, où un corps haut et étroit doit rester droit sur une base mobile. Le système est délicat parce qu’il n’y a qu’une seule force de commande sur le chariot, et pourtant il faut gérer simultanément le mouvement du chariot et l’angle du pendule. De petites variations de masse, de longueur ou de frottement peuvent rendre le système instable, donc toute méthode de commande doit non seulement maintenir le pendule en équilibre mais aussi rester fiable quand le monde réel ne correspond pas parfaitement au modèle mathématique.
De la commande franche à la direction plus douce
Les ingénieurs utilisent depuis longtemps une méthode appelée commande à mode glissant pour gérer de tels systèmes incertains. Elle fonctionne en contraignant le comportement du système à suivre une trajectoire soigneusement choisie et en le maintenant sur cette trajectoire, ce qui la rend très robuste face aux perturbations et aux erreurs de modèle. Cependant, cette méthode tend à commuter le signal de commande de façon abrupte, entraînant des oscillations rapides appelées ‘‘chattering’’. En pratique, cela peut gaspiller de l’énergie, user les moteurs et risquer d’exciter des vibrations indésirables. Des méthodes plus douces utilisant la logique floue peuvent lisser l’action de commande, mais elles perdent souvent une partie de la robustesse nécessaire lorsque les conditions changent fortement.
Mêler règles intelligentes et commande robuste
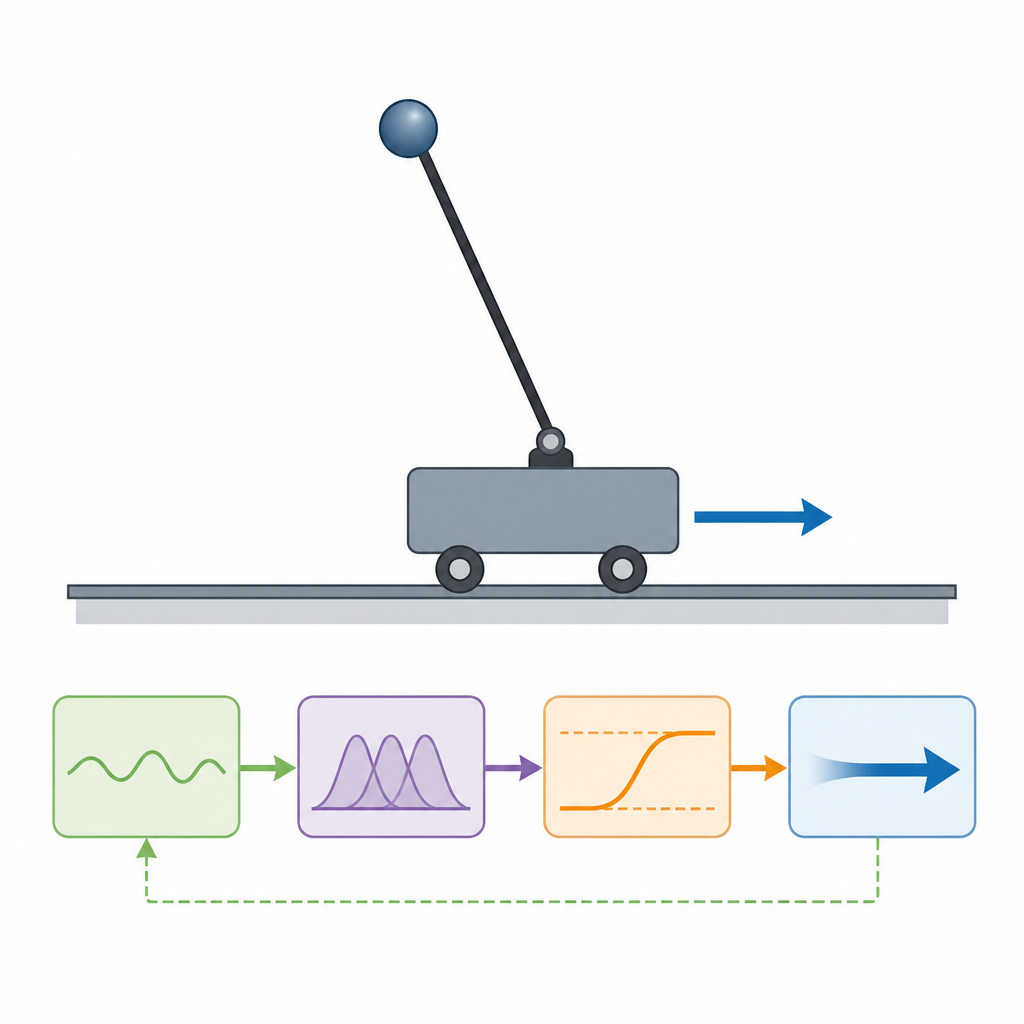
Les auteurs proposent un contrôleur adaptatif flou à mode glissant qui combine les avantages des deux approches. D’abord, ils établissent un modèle mathématique du chariot et du pendule en utilisant la mécanique standard, montrant comment la poussée du chariot et l’oscillation du pendule sont étroitement liées. Ensuite, ils conçoivent une trajectoire cible stratifiée, ou surface de glissement, qui donne la priorité au maintien de la tige en position verticale tout en orientant le chariot vers l’emplacement souhaité. Par-dessus cela, un système de logique floue observe l’écart par rapport à l’objectif et la vitesse du système, et utilise des décisions simples basées sur des règles pour remplacer la commutation brutale par un signal plus lisse. Une seconde couche floue ajuste l’intensité d’action du contrôleur, augmentant l’effort lorsque le pendule s’écarte fortement de la verticale et en réduisant l’intensité à mesure qu’il se rapproche de l’équilibre.
Comment se comporte le nouveau contrôleur sous contrainte
Les chercheurs testent trois approches en simulation numérique : la méthode classique à mode glissant, une version floue à mode glissant, et leur contrôleur adaptatif flou à mode glissant. Ils évaluent les performances en conditions normales, lorsqu’un coup soudain est appliqué au chariot, et lorsque la masse et la longueur du système sont modifiées pour simuler des erreurs de conception ou des variations de charge. L’approche basique à mode glissant répond rapidement mais dépasse la consigne et présente un fort chattering, avec des forces de commande très importantes. Le contrôleur flou à mode glissant fonctionne plus en douceur mais peut perdre en précision lorsque les paramètres changent. Le contrôleur adaptatif flou à mode glissant maintient le pendule et le chariot proches de leurs valeurs désirées dans tous les scénarios, tout en utilisant l’effort de commande global le plus faible et en conservant des mouvements doux et bien maîtrisés.
Ce que cela signifie pour les machines de demain
En termes simples, l’étude montre qu’un contrôleur qui adapte sa force avec un raisonnement de type flou peut garder un système instable à la verticale, rejeter les perturbations et consommer moins d’énergie, sans à-coups nerveux. En ajustant automatiquement sa réponse à mesure que les erreurs augmentent ou diminuent, le contrôleur adaptatif flou à mode glissant offre une recette pratique pour concilier performance et douceur dans des dispositifs difficiles à commander. Cette approche peut être étendue au-delà du chariot et du pendule de laboratoire vers des robots mobiles, des véhicules aériens et d’autres machines sous-actionnées qui doivent rester stables dans un monde incertain et changeant.
Citation: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Mots-clés: pendule inversé, commande floue, commande à mode glissant, commande robuste, systèmes sous-actionnés