Clear Sky Science · he
בקרת מצבי החלקה פאזית אדפטיבית המיושמת על מטוטלת הפוכה
לאזן מוט על עגלה נעה
דמיינו שאתם מנסים לאזן מטאטא זקוף על כף ידכם בזמן שאתם הולכים לנקודה מסוימת בחדר. עליכם למנוע את התהפכות המטאטא בעודכם מכוונים את הגוף למקום הנכון, למרות מהמורות ברצפה או שינויים במשקל המטאטא. המחקר הזה מתמודד עם אתגר דומה בהנדסה על ידי לימוד עגלה נעה לשמור על מוט זקוף ולזוז בצורה חלקה אל מיקום יעד, כל זאת תוך חיסכון באנרגיה והתמודדות עם הפתעות.
מדוע המלאכה הזו חשובה
עגלה עם מטוטלת זקופה היא מקרה מבחן קלאסי לבעיות בקרה קשות. היא מתמצתת מצבים המתרחשים ברקטות, רובוטים בעל־גלגלים זוגיים ואף בחלקים מרובוטים דמויי־אדם, שבהם גוף גבוה וצר חייב להישאר זקוף על בסיס נייד. המערכת מסובכת כי יש רק כוח בקרה אחד על העגלה, ועדיין יש לנהל בעת ובעונה אחת גם את תנועת העגלה וגם את זווית המטוטלת. שינויים קטנים במסה, באורך או בחיכוך יכולים להפוך את המערכת לבלתי יציבה, ולכן שיטת בקרה חייבת לא רק לאזן את המטוטלת אלא גם להישאר אמינה כאשר העולם האמיתי לא תואם במדויק את המתמטיקה.
ממעשה נוקשה להיגוי חלק יותר
מהנדסים השתמשו זמן רב בשיטת בקרת מצבי החלקה כדי להתמודד עם מערכות לא ודאיות כאלה. השיטה פועלת על ידי כיפוף התנהגות המערכת למסלול שנבחר בקפידה ושמירה עליו, מה שהופך אותה לעמידה להפרעות ושגיאות התגודל. עם זאת, השיטה נוטה להחליף את אות הבקרה בצורה פתאומית, מה שמוביל לתנודות מהירות לאחור־ולפנים הנקראות "צ׳אט־רינג". בפועל זה עלול לבזבז אנרגיה, לשחוק מנועים ולהתגרות בתנודות לא רצויות. שיטות רכות יותר המבוססות על לוגיקה פאזית יכולות להחליק את פעולת הבקרה, אך לעיתים הן מאבדות חלק מהקשיחות הנחוצה כאשר התנאים משתנים באופן משמעותי.
שילוב כללים חכמים עם בקרה חסינה
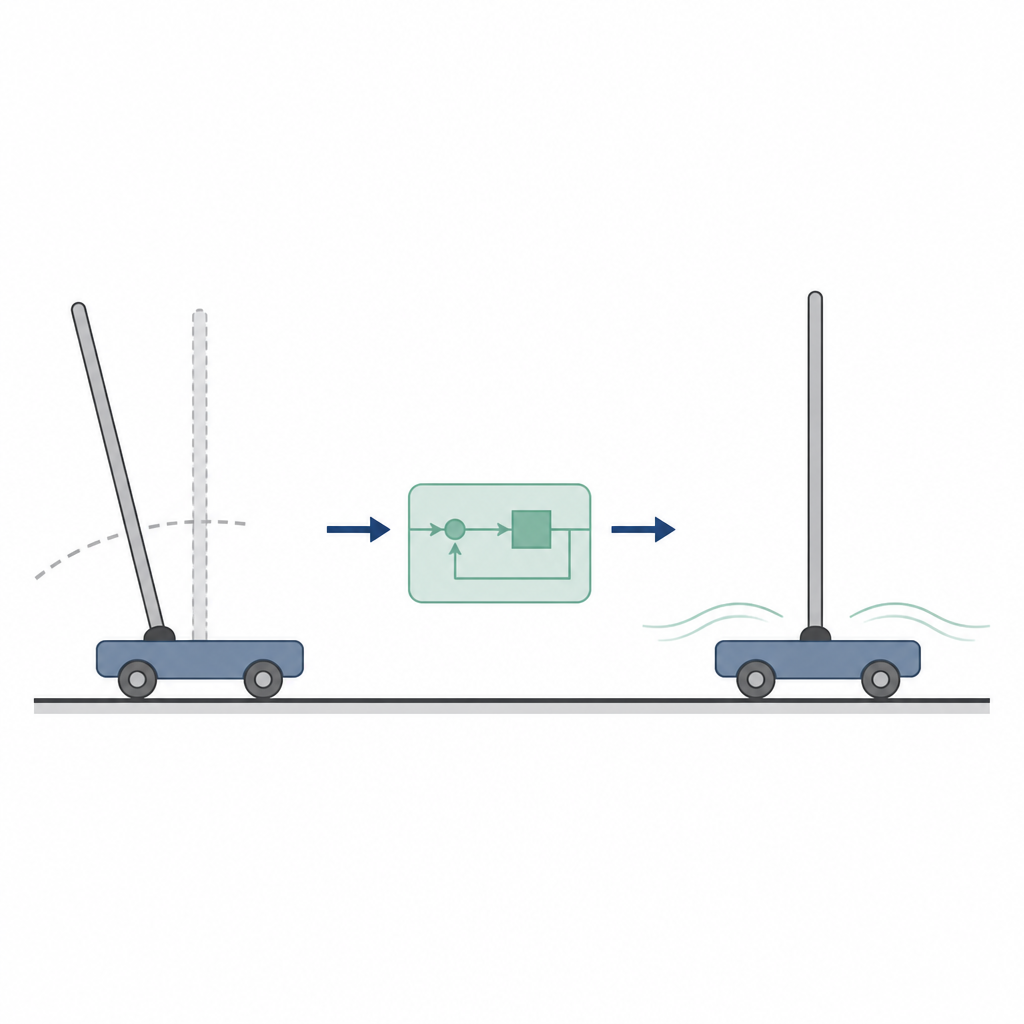
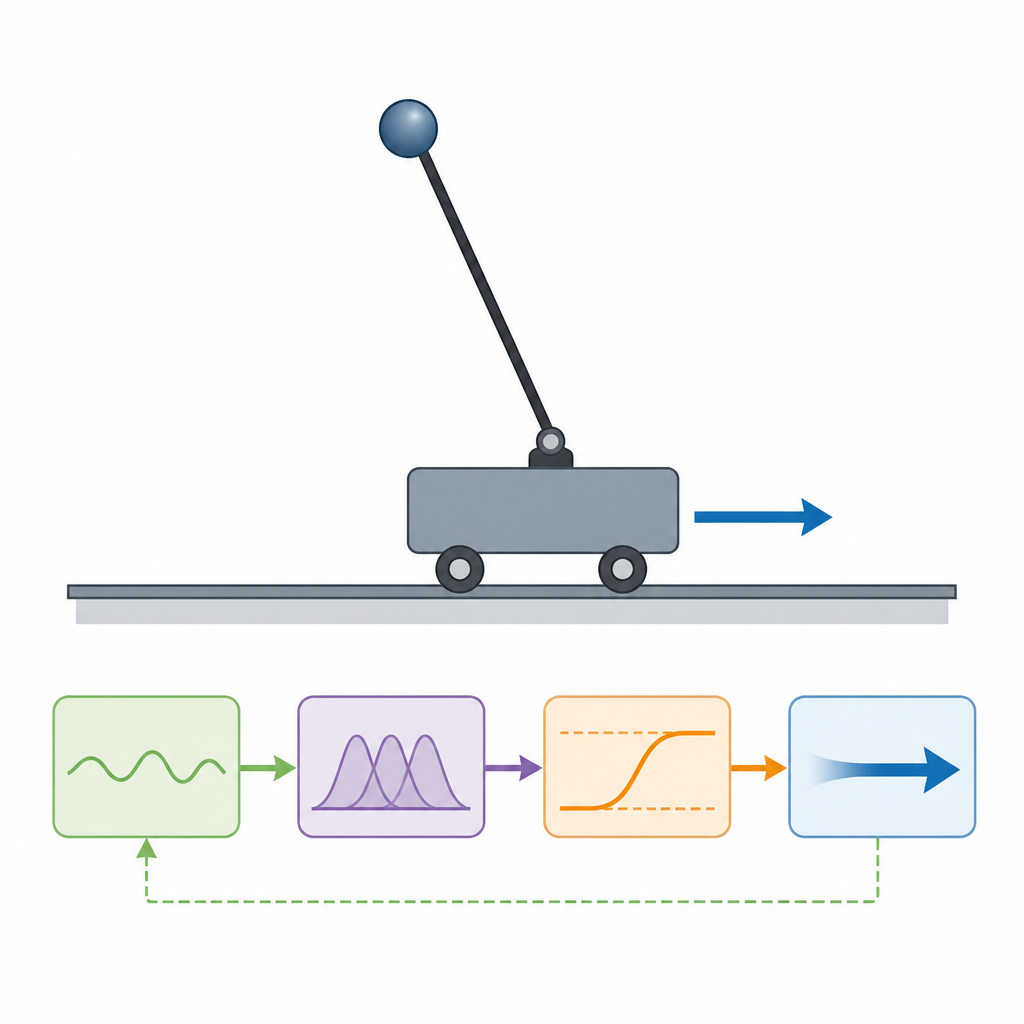
המחברים מציעים בקר מצבי החלקה פאזי אדפטיבי שמשלב את היתרונות של שתי הגישות. ראשית הם בונים מודל מתמטי של העגלה והמוט באמצעות מכניקה סטנדרטית, שמדגים כיצד הדחיפה של העגלה ונדנוד המטוטלת קשורים זה לזה בצמידות. לאחר מכן הם מעצבים משטח החלקה רב־שכבתי שמעניק עדיפות לשמירה על המטוטלת זקופה ובו־זמנית מנווט את העגלה למיקום המבוקש. מעל לכך, מערכת לוגיקה פאזית מפקחת על המרחק של המערכת מהמטרה ועל מהירותה, ומשתמשת בהחלטות בסגנון כללים פשוטים כדי להחליף את ההחלפה החדה של אות הבקרה באות חלקה יותר. שכבה פאזית שנייה מתאמת עד כמה הבקר צריך להתערב, מגבירה את המאמץ כאשר המטוטלת סוטה ממאוזן ומרגיעה אותו ככל שהיא מתקרבת לאיזון.
כיצד הבקר החדש מתנהג תחת עומס
החוקרים בודקים שלוש גישות בסימולציות ממוחשבות: שיטת מצבי ההחלקה המסורתית, גרסה פאזית החלקה, והבקר הפאזי האדפטיבי שלהם. הם בוחנים ביצועים בתנאים נורמליים, כאשר ניתנת דחיפה פתאומית לעגלה, וכאשר מסת ואורך המערכת משתנים כדי לחקות שגיאות עיצוב או שינויים בעומס. שיטת ההחלקה הבסיסית מגיבה במהירות אך חורגת מהמטרה ומראה צ׳אט־רינג חזק, עם כוחות בקרה גדולים מאוד. בקר ההחלקה הפאזית פועל בצורה חלקה יותר אך עלול לאבד קצת דיוק כאשר הפרמטרים משתנים. הבקר הפאזי האדפטיבי שומר על המטוטלת והעגלה קרובים לערכי היעד בכל התרחישים, תוך שימוש במאמץ בקרה כולל הנמוך ביותר, ושמירה על תנועות עדינות ובעלות התנהגות טובה.
מה משמעות הדבר עבור מכונות עתידיות
באופן פשוט, המחקר מראה שבקר שמתאים את עוצמתו באמצעות הסקה בסגנון כללים פאזיים יכול לשמור מערכת רעועה זקופה, לדחות הפרעות ולהשתמש פחות באנרגיה — הכל מבלי לגרום להתכווצויות עצביות. על ידי כיוונון תגובתו אוטומטית ככל שהשגיאות גדלות או קטנות, הבקר הפאזי האדפטיבי מציע נוסחה מעשית לאיזון בין ביצועים לחלקות במכשירים שקשה לשלוט בהם. גישה זו ניתנת להרחבה מעבר לעגלה ולמטוטלת של המעבדה לרובוטים ניידים, כלי טיס ורכבים אחרים בעלי פעוליות חלקית שצריכים להישאר יציבים בסביבה משתנה ובלתי ודאית.
ציטוט: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
מילות מפתח: מטוטלת הפוכה, בקרה פאזית, בקרת מצבי החלקה, בקרה חסינה, מערכות בעלות פעוליות חלקית