Clear Sky Science · ja
倒立振子に適用した適応ファジィスライディングモード制御
動く台車で棒を立て続ける
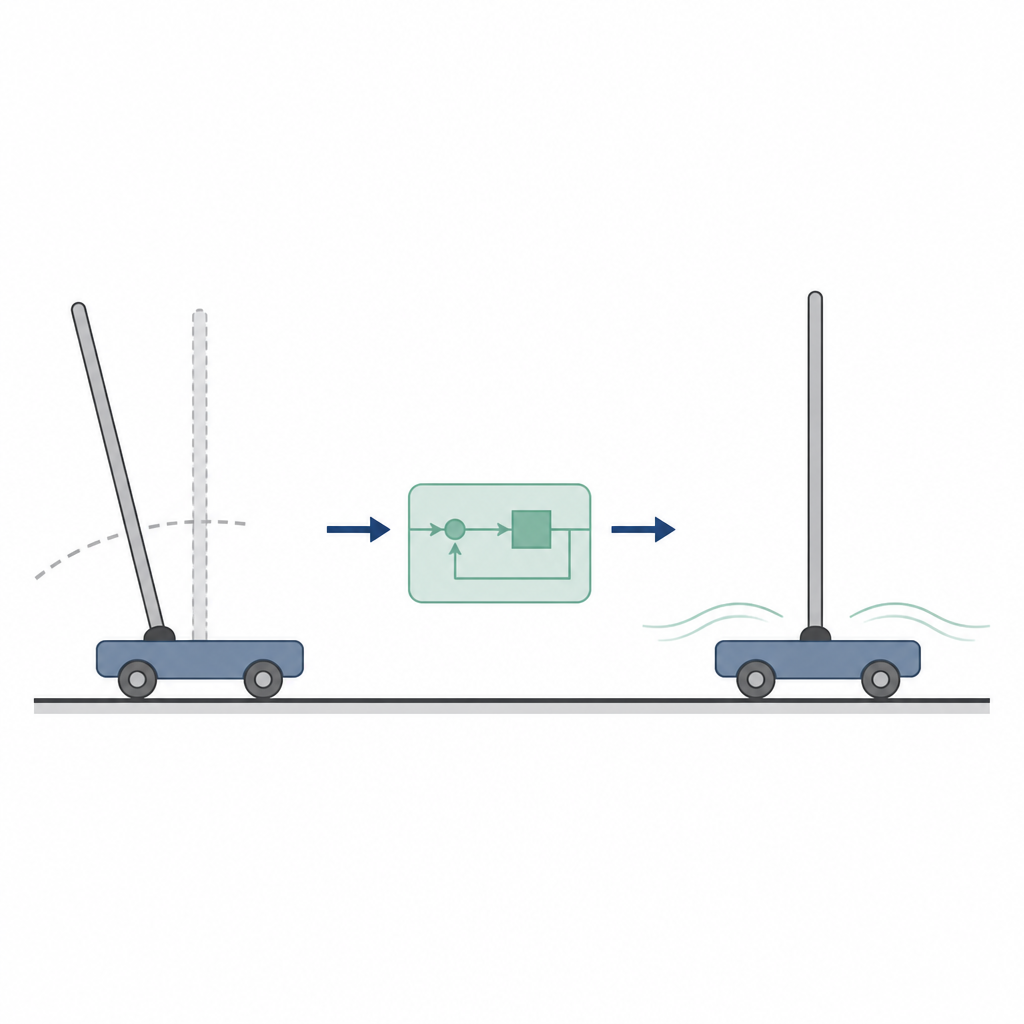
手のひらの上で箒を立てたまま部屋の特定の場所まで歩くことを想像してみてください。床の段差や箒の重さの変化にもかかわらず、箒が倒れないように保ちながら体を目的地に導かなければなりません。本研究はこれと同様の課題に取り組み、移動する台車に棒を直立させたまま滑らかに目標位置へ移動させ、エネルギーを節約しつつ予期せぬ事態にも対処できるようにします。
なぜこのバランス制御が重要か
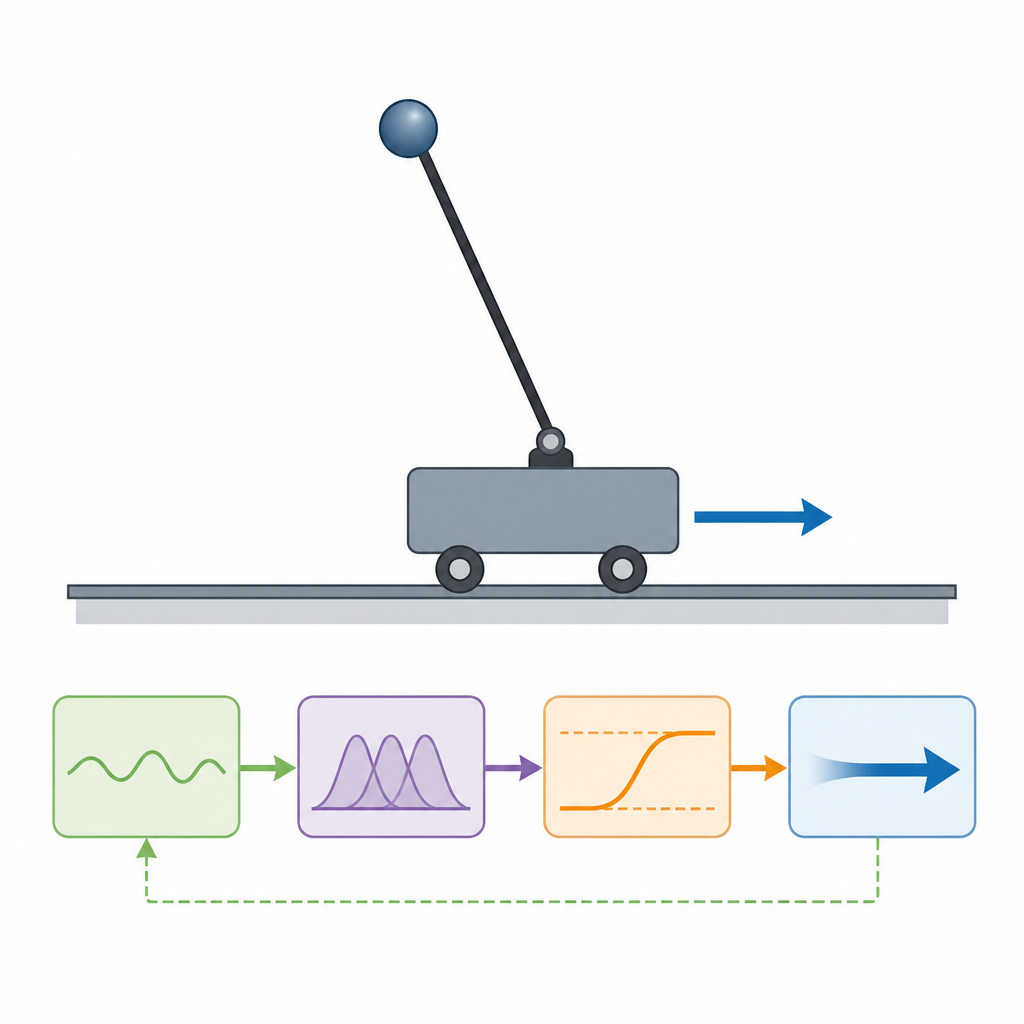
台車に直立した振子を載せた系は、難しい制御問題の古典的な試験台です。これはロケットや二輪ロボット、ヒューマノイドロボットの一部のように、狭く高い構造を移動する台座の上で直立させ続ける必要がある状況をよく表しています。制御は厄介で、台車に働く制御力は一つだけなのに、台車の位置と振子の角度の両方を同時に管理しなければなりません。質量や長さ、摩擦のわずかな変化でも系は不安定になり得るため、現実が理論と完全に一致しない場合でも信頼できる制御手法が必要です。
硬い制御から滑らかな操舵へ
この種の不確実な系を扱うために、エンジニアは長年スライディングモード制御を用いてきました。これは系の挙動を慎重に選んだ軌道に押し込み、そこに保つことで摂動やモデル誤差に対して非常にロバストになります。しかしこの手法は制御信号を急に切り替えがちで、チャタリングと呼ばれる急激な往復動作を引き起こします。実際にはエネルギーの浪費やモータの摩耗、不快な振動の励起を招くことがあります。ファジィ論理を使った柔らかい手法は制御動作を平滑化できますが、条件が大きく変化したときに必要な強さを失うことがあります。
賢いルールとロバスト制御の融合
著者らは両者の長所を組み合わせた適応型ファジィ・スライディングモード制御器を提案します。まず、標準的な力学を用いて台車と振子の数学モデルを構築し、台車の推力と振子の振れが密接に結びついていることを示します。次に、振子を直立に保つことを優先しつつ台車を目標位置へ導く多層の目標軌道(スライディング面)を設計します。その上でファジィ論理システムが系の目標からのずれとその変化速度を観測し、単純なルールに基づく判断で過度なオン・オフ切替を滑らかな信号に置き換えます。第二のファジィ層は制御の強さを調整し、振子が大きく傾いたときに出力を強め、バランスに近づくと作用を弱めます。
新しい制御器のストレス下での挙動
研究者らは数値シミュレーションで三つの手法を比較検証しました:従来のスライディングモード、ファジィスライディング、そして提案する適応ファジィスライディングです。通常条件、台車への突然の外力、設計誤差や搭載物変化を模した質量・長さの変更の各状況で性能を評価しました。基本的なスライディング手法は応答が速いもののオーバーシュートと強いチャタリングを示し、非常に大きな制御力を必要としました。ファジィスライディングは動作が滑らかですが、パラメータ変化時に精度を落とすことがあります。提案する適応ファジィスライディングは、いずれのシナリオでも振子と台車を目標値近くに保ち、全体の制御努力を最も小さくしつつ穏やかで良好な動作を維持しました。
将来の機械にとっての意義
簡潔に言えば、本研究はファジィ的なルールに基づいて制御の強さを適応的に変えることで、揺れやすい系を直立に保ち、外乱を拒絶し、エネルギー消費を抑えつつ神経質なけいれんを回避できることを示しています。誤差が増減するにつれて応答を自動的に調整することで、適応ファジィ・スライディング制御は性能と滑らかさの両立に実用的な手法を提供します。このアプローチは、実験室の台車と振子に限らず、移動ロボットや航空機、変化の多い不確実な環境で安定を保たねばならない他の不完全駆動系にも拡張可能です。
引用: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
キーワード: 倒立振子, ファジィ制御, スライディングモード制御, ロバスト制御, 不完全駆動系