Clear Sky Science · pt
Controle por modo deslizante fuzzy adaptativo aplicado ao pêndulo invertido
Equilibrando uma vara sobre um carrinho em movimento
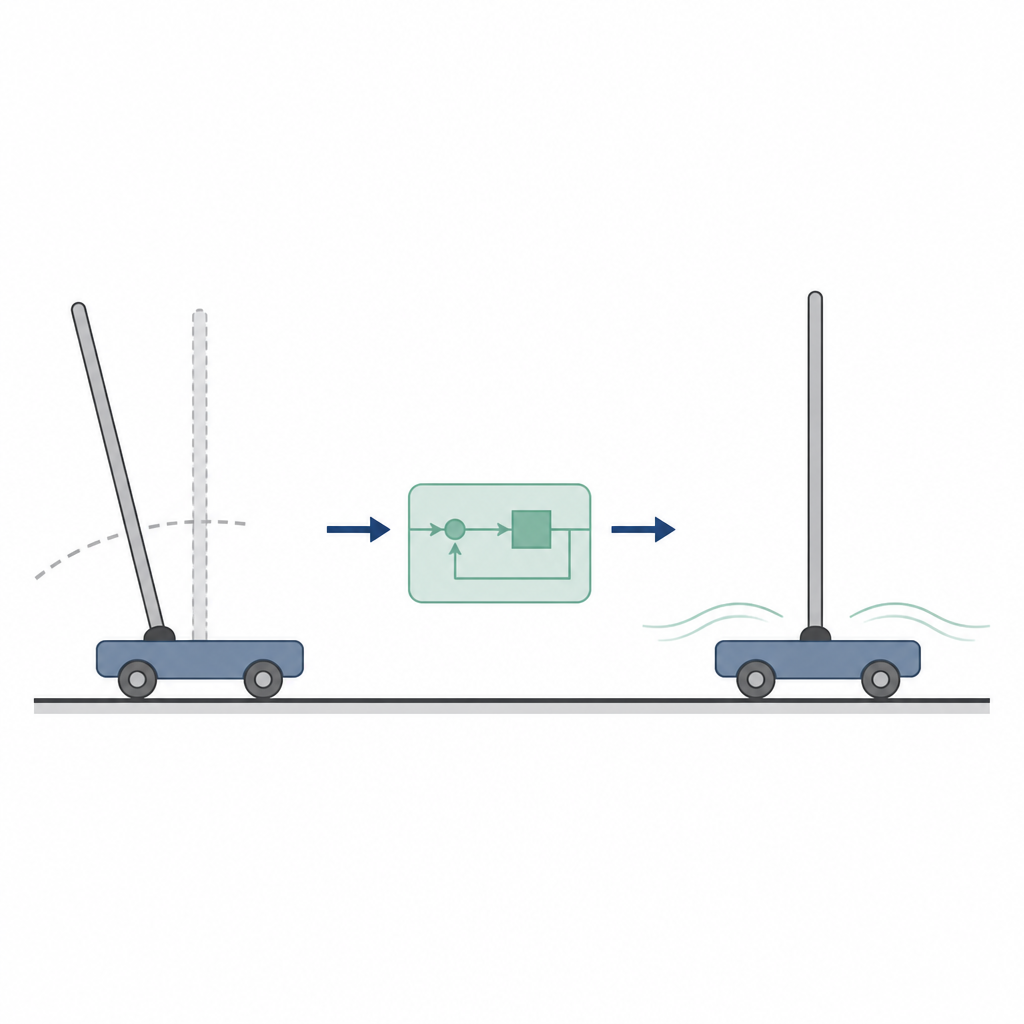
Imagine tentar equilibrar uma vassoura verticalmente na palma da mão enquanto caminha até um ponto específico do cômodo. É preciso evitar que a vassoura tombe ao mesmo tempo em que guia o corpo para o lugar certo, apesar de desníveis no chão ou mudanças no peso da vassoura. Este estudo enfrenta um desafio semelhante em engenharia, ensinando um carrinho em movimento a manter uma haste ereta e deslocar-se suavemente até uma posição alvo, economizando energia e lidando com imprevistos.
Por que esse ato de equilíbrio importa
O carrinho com pêndulo ereto é um caso de teste clássico para problemas de controle difíceis. Ele reproduz o que ocorre em foguetes, robôs de duas rodas e até em partes de robôs humanoides, onde um corpo alto e estreito precisa permanecer ereto sobre uma base móvel. O sistema é complicado porque existe apenas uma força de controle no carrinho, e ainda assim é preciso gerir tanto o movimento do carrinho quanto o ângulo do pêndulo simultaneamente. Pequenas variações de massa, comprimento ou atrito podem tornar o sistema instável, portanto qualquer método de controle deve não apenas equilibrar o pêndulo, mas também permanecer confiável quando o mundo real não corresponde perfeitamente ao modelo matemático.
Do controle rígido à direção mais suave
Engenheiros há muito utilizam um método chamado controle por modo deslizante para lidar com sistemas incertos. Ele funciona forçando o comportamento do sistema a seguir uma trajetória cuidadosamente escolhida e mantendo-o ali, o que o torna muito robusto a perturbações e erros de modelagem. No entanto, esse método tende a alternar abruptamente o sinal de controle, gerando movimentos rápidos de vai-e-vem conhecidos como chattering. Na prática, isso pode desperdiçar energia, desgastar motores e provocar vibrações indesejadas. Métodos mais suaves usando lógica fuzzy podem atenuar a ação de controle, mas frequentemente perdem parte da robustez necessária quando as condições mudam significativamente.
Combinando regras inteligentes com controle robusto
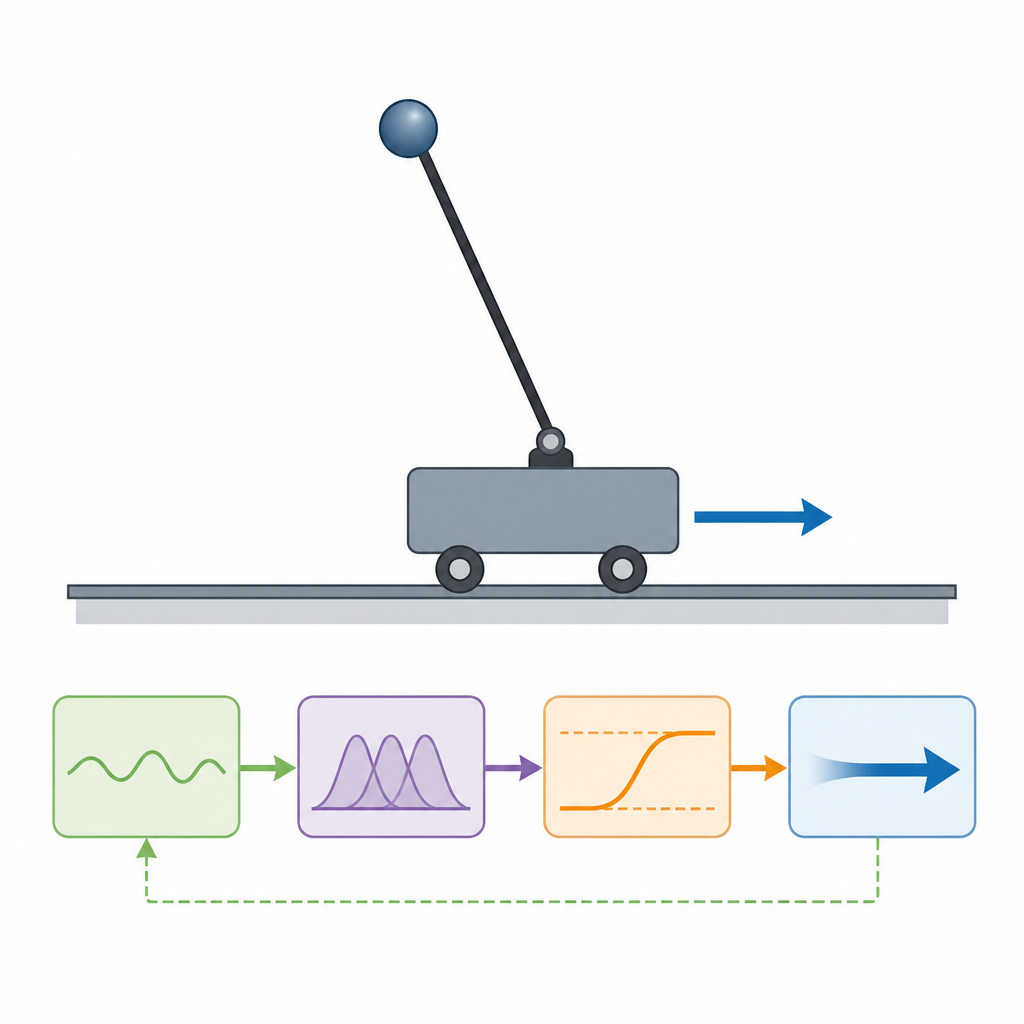
Os autores propõem um controlador por modo deslizante fuzzy adaptativo que combina os pontos fortes de ambos os mundos. Primeiro, constroem um modelo matemático do carrinho e do pêndulo usando mecânica padrão, mostrando como o impulso do carrinho e o balanço do pêndulo estão fortemente acoplados. Em seguida, projetam uma trajetória alvo em camadas, ou superfície deslizante, que dá prioridade a manter o pêndulo ereto enquanto também guia o carrinho até a posição desejada. Sobre isso, um sistema de lógica fuzzy observa quão longe o sistema está do objetivo e quão rápido se move, e usa decisões do tipo “regras simples” para substituir a comutação brusca por um sinal mais suave. Uma segunda camada fuzzy ajusta a intensidade da ação do controlador, aumentando o esforço quando o pêndulo se afasta muito da vertical e aliviando conforme ele se aproxima do equilíbrio.
Como o novo controlador se comporta sob estresse
Os pesquisadores testam três abordagens em simulações por computador: o método clássico de modo deslizante, uma versão fuzzy do modo deslizante e seu controlador fuzzy adaptativo. Eles avaliam o desempenho em condições normais, quando um empurrão súbito é aplicado ao carrinho, e quando a massa e o comprimento do sistema são alterados para simular erros de projeto ou variações de carga. A abordagem básica por modo deslizante responde rapidamente, mas tem overshoot e forte chattering, com forças de controle muito elevadas. O controlador fuzzy deslizante opera de forma mais suave, mas pode perder alguma precisão quando os parâmetros mudam. O controlador fuzzy adaptativo mantém o pêndulo e o carrinho próximos dos valores desejados em todos os cenários, usando o menor esforço de controle global e mantendo movimentos suaves e bem comportados.
O que isso significa para máquinas do futuro
Em termos simples, o estudo mostra que um controlador que adapta sua intensidade usando raciocínio por regras fuzzy consegue manter um sistema instável ereto, rejeitar perturbações e consumir menos energia, tudo isso sem oscilações nervosas. Ao ajustar sua resposta automaticamente conforme o erro cresce ou diminui, o controlador por modo deslizante fuzzy adaptativo oferece uma receita prática para equilibrar desempenho e suavidade em dispositivos de controle difícil. Essa abordagem pode ser estendida além do carrinho e pêndulo de laboratório para robôs móveis, veículos aéreos e outras máquinas subatuadas que precisam permanecer estáveis em um mundo incerto e em mudança.
Citação: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Palavras-chave: pêndulo invertido, controle fuzzy, controle por modo deslizante, controle robusto, sistemas subatuados