Clear Sky Science · ar
التحكم الانزلاقي الغامض التكيفي المطبق على البندول المقلوب
موازنة عصا على عربة متحركة
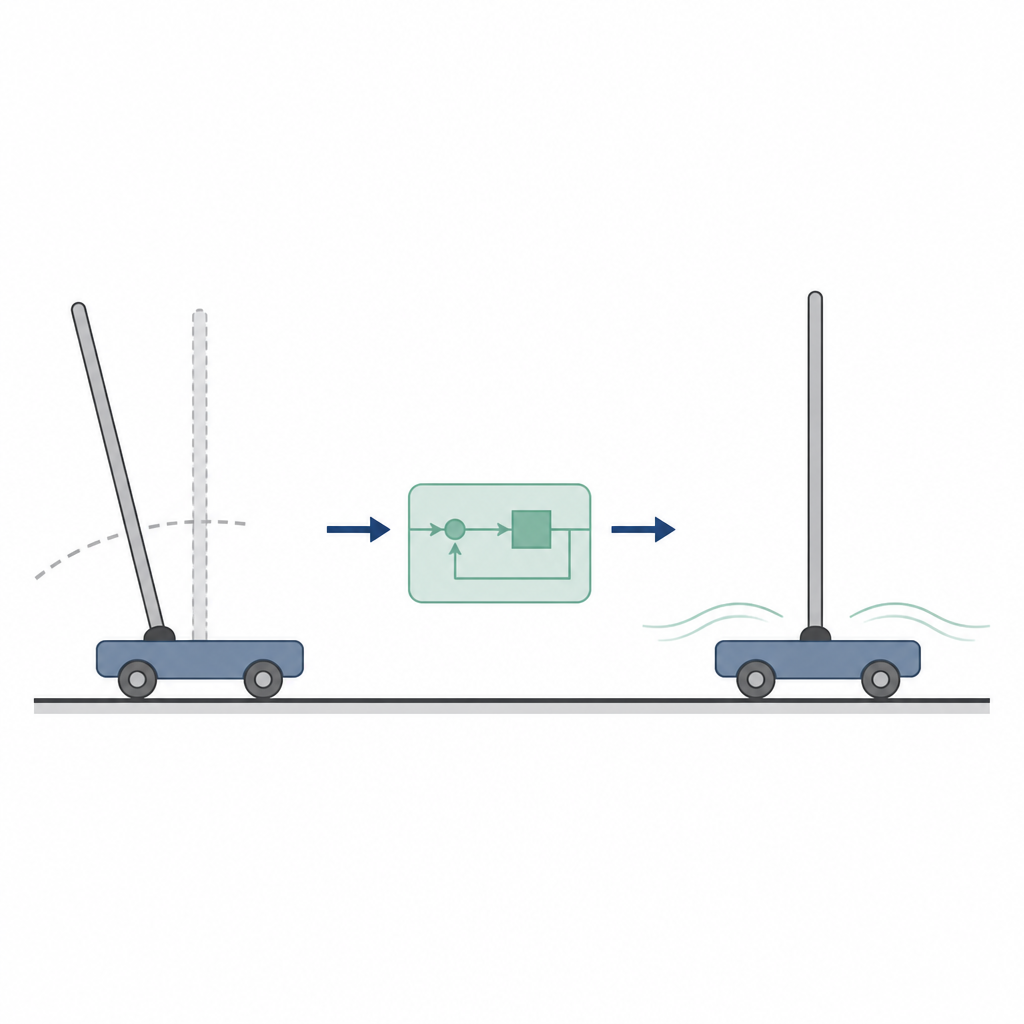
تخيل محاولة موازنة مكنسة عمودية على راحة يدك أثناء المشي إلى نقطة معينة عبر الغرفة. يجب أن تمنع المكنسة من السقوط بينما توجه جسدك إلى المكان الصحيح، رغم المطبات في الأرض أو تغير وزن المكنسة. تتناول هذه الدراسة تحدياً هندسياً مشابهاً بتعليم عربة متحركة إبقاء قضيب واقفاً ونقله بسلاسة إلى موقع مستهدف، كل ذلك مع توفير الطاقة والتعامل مع المفاجآت.
لماذا تهم هذه اللعبة التوازنية
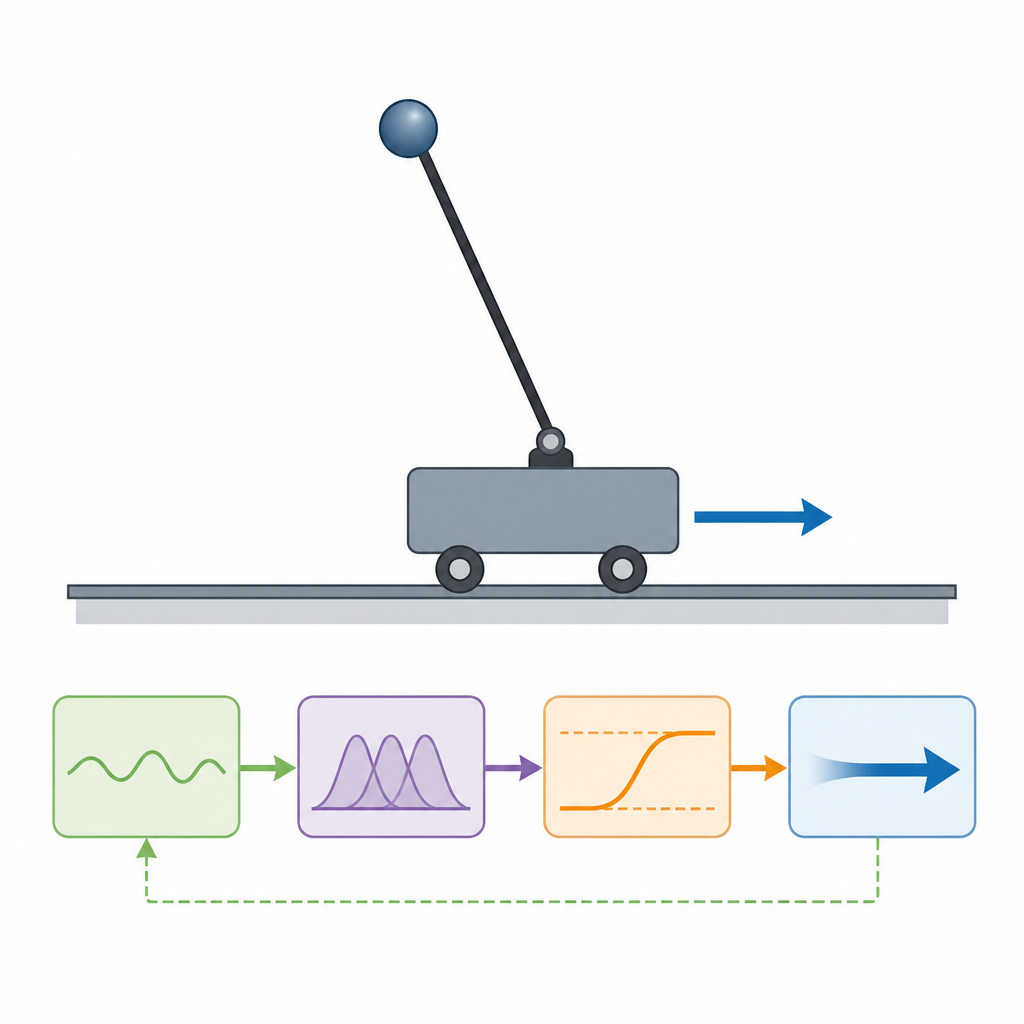
العربة مع بندول عمودي تمثل حالة اختبار كلاسيكية لمشكلات التحكم الصعبة. إنها تجسد ما يحدث في الصواريخ، والروبوتات ذات العجلتين، وحتى أجزاء من الروبوتات البشرية الشكل، حيث يجب أن يبقى جسم طويل ورفيع منتصبا على قاعدة متحركة. النظام معقد لأنه يوجد قوة تحكم واحدة فقط على العربة، ومع ذلك يجب إدارة حركة العربة وزاوية البندول في آن واحد. يمكن للتغيرات الصغيرة في الكتلة أو الطول أو الاحتكاك أن تجعل النظام غير مستقر، لذلك يجب أن يكون أي أسلوب تحكم قادراً ليس فقط على موازنة البندول بل أيضاً على البقاء موثوقاً عندما لا تتطابق الظروف الحقيقية تماماً مع النموذج الرياضي.
من التحكم الصلب إلى التوجيه الأكثر سلاسة
لطالما استخدم المهندسون طريقة تسمى التحكم بالوضع الانزلاقي للتعامل مع أنظمة غير مؤكدة كهذه. تعمل هذه الطريقة عن طريق إجبار سلوك النظام على اتباع مسار محدد بعناية والحفاظ عليه، مما يجعلها شديدة المقاومة للاضطرابات وأخطاء النمذجة. ومع ذلك، فإن هذه الطريقة تميل إلى تبديل إشارة التحكم فجأة، مما يؤدي إلى حركات ذهاباً وإياباً سريعة تُعرف بالتذبذب (chattering). في التطبيق العملي، قد يسبب ذلك هدر للطاقة، وإهلاك المحركات، وإثارة اهتزازات غير مرغوبة. الطرق الألطف التي تستخدم المنطق الضبابي يمكنها تنعيم فعل التحكم، لكن غالباً ما تفقد بعض الصلابة المطلوبة عندما تتغير الظروف بشكل كبير.
مزج القواعد الذكية مع التحكم القوي
يقترح المؤلفون متحكماً انزلاقياً غامضاً تكيفياً يمزج بين مزايا كلا النهجين. أولاً، يبنون نموذجاً رياضياً للعربة والبندول باستخدام ميكانيكا قياسية، موضحين كيف يرتبط دفعة العربة وتأرجح البندول ارتباطاً وثيقاً. ثم يصممون سطح انزلاقي متعدد الطبقات كمسار مستهدف يعطي أولوية لإبقاء البندول منتصباً مع توجيه العربة إلى موقعها المطلوب. فوق ذلك، يراقب نظام منطق ضبابي مدى ابتعاد النظام عن هدفه وسرعة حركته، ويستخدم قواعد بسيطة لاتخاذ قرار لتحل محل التبديل القاسي من تشغيل/إيقاف بإشارة أكثر سلاسة. طبقة ضبابية ثانية تعدل شدة تصرف المتحكم، فتزيد الجهد عندما ينحرف البندول بعيداً عن الانتصاب وتخفف عندما يقترب من التوازن.
كيف يتصرف المتحكم الجديد تحت الضغط
اختبر الباحثون ثلاث طرق في محاكاة حاسوبية: طريقة الانزلاق التقليدية، نسخة انزلاقية ضبابية، ومتحكمهم الانزلاقي الضبابي التكيفي. تحققوا من الأداء في ظروف عادية، عند تطبيق دفعة مفاجئة على العربة، وعند تغيير كتلة النظام وطوله لمحاكاة أخطاء التصميم أو تغيّر الحمولة. استجابت طريقة الانزلاق الأساسية بسرعة لكنها تجاوزت الهدف وأظهرت تذبذباً قوياً مع قوى تحكم كبيرة جداً. عمل المتحكم الانزلاقي الضبابي بسلاسة أكبر لكنه قد يفقد بعض الدقة عند تغير المعلمات. حافظ المتحكم الانزلاقي الضبابي التكيفي على قرب البندول والعربة من القيم المرغوبة عبر جميع السيناريوهات، مع استخدام أصغر جهد تحكم إجمالي، والحفاظ على حركات لطيفة وسلسة.
ما معنى هذا للآلات المستقبلية
بعبارات بسيطة، تُظهر الدراسة أن متحكماً يضبط شدته باستخدام استدلال شبيه بالقواعد الضبابية يمكنه إبقاء نظام متمايل منتصباً، ورفض الاضطرابات، واستخدام طاقة أقل، كل ذلك دون ارتعاش عصبي. من خلال ضبط استجابته تلقائياً مع نمو الأخطاء أو تقلصها، يقدم المتحكم الانزلاقي الضبابي التكيفي وصفة عملية لموازنة الأداء والسلاسة في أجهزة يصعب التحكم فيها. يمكن تمديد هذا النهج إلى ما وراء عربة المخبر والبندول إلى روبوتات متنقلة، ومنصات جوية، وآلات ناقصة الفعل أخرى يجب أن تبقى مستقرة في عالم متغير وغير مؤكد.
الاستشهاد: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
الكلمات المفتاحية: البندول المقلوب, التحكم الغامض, التحكم بالوضع الانزلاقي, التحكم القوي, الأنظمة ناقصة الفعل