Clear Sky Science · de
Adaptive fuzzy sliding mode control applied to inverted pendulum
Balancing a stick on a moving cart
Stellen Sie sich vor, Sie versuchen, einen Besenstiel auf Ihrer Handfläche aufrecht zu halten, während Sie zugleich zu einem bestimmten Punkt im Raum gehen. Sie müssen verhindern, dass der Stiel kippt, und Ihren Körper zum richtigen Ort führen, trotz Bodenunebenheiten oder Veränderungen am Besenstiel. Diese Studie geht eine ähnliche Herausforderung in der Technik an, indem sie einem fahrenden Wagen beibringt, eine Stange aufrecht zu halten und gleichzeitig sanft zu einer Zielposition zu fahren, dabei Energie zu sparen und mit unerwarteten Einflüssen fertigzuwerden.
Why this balancing act matters
Der Wagen mit aufrecht stehendem Pendel ist ein klassischer Prüfstand für schwierige Regelungsaufgaben. Er zeigt Situationen aus Raketen, zweirädrigen Robotern und sogar Teilen humanoider Roboter, wo ein hoher, schmaler Körper auf einer bewegten Basis aufrecht bleiben muss. Das System ist knifflig, weil nur eine Stellkraft auf den Wagen wirkt, während sowohl die Bewegung des Wagens als auch der Winkel des Pendels gleichzeitig geregelt werden müssen. Kleine Änderungen in Masse, Länge oder Reibung können das System instabil machen, daher muss eine Regelungsmethode das Pendel nicht nur balancieren, sondern auch zuverlässig bleiben, wenn die reale Welt nicht perfekt mit dem Modell übereinstimmt.
From stiff control to smoother steering
Ingenieure verwenden seit Langem die sogenannte Sliding-Mode-Regelung, um mit solchen unsicheren Systemen umzugehen. Sie funktioniert, indem sie das Verhalten des Systems auf eine sorgfältig gewählte Bahn zwingt und dort hält, was sie sehr robust gegen Störungen und Modellfehler macht. Diese Methode neigt jedoch dazu, das Stellignal abrupt zu schalten, was zu schnellen Hin- und Herbewegungen führt, dem sogenannten Chattering. In der Praxis kann das Energie verschwenden, Motoren verschleißen lassen und unerwünschte Schwingungen anregen. Sanftere Verfahren auf Basis von Fuzzy-Logik können die Stellaktion glätten, verlieren dabei jedoch oft einen Teil der Robustheit, die bei stärkeren Änderungen nötig ist.
Blending smart rules with robust control
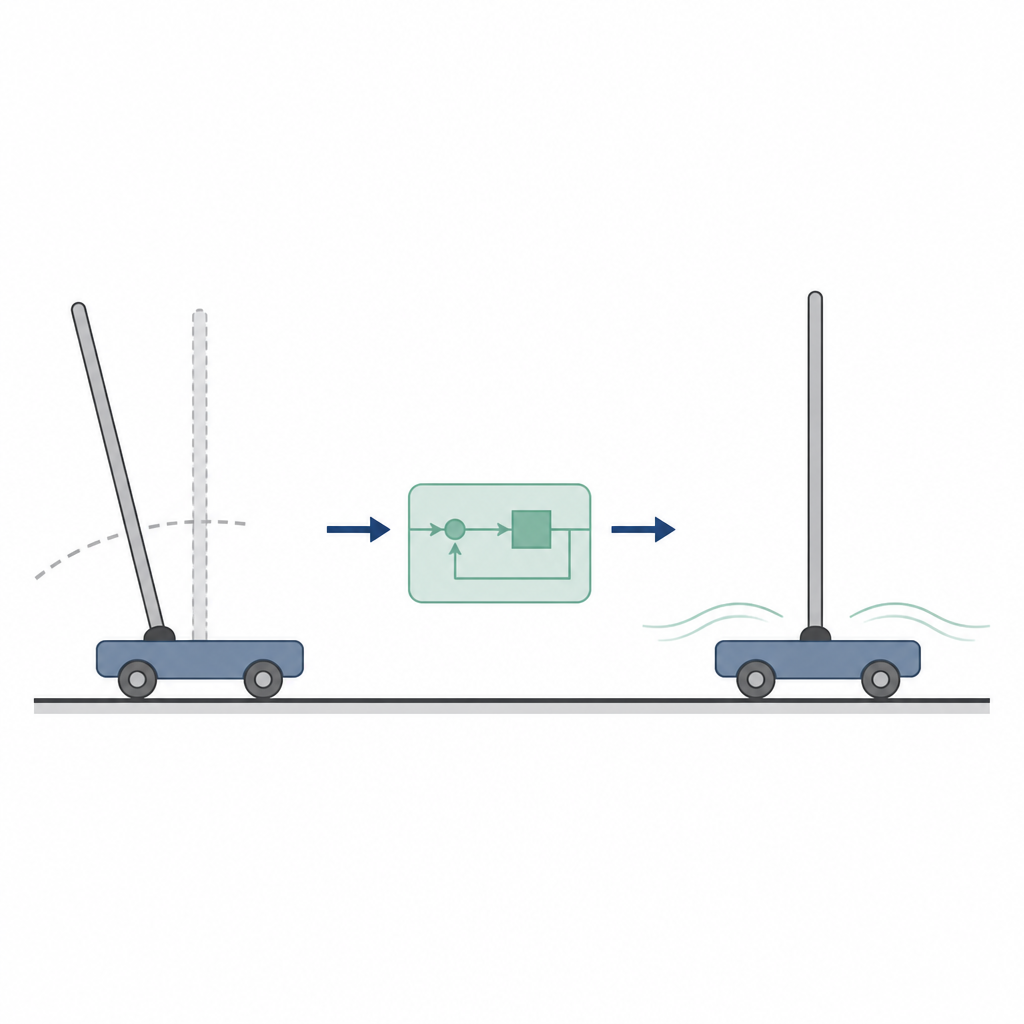
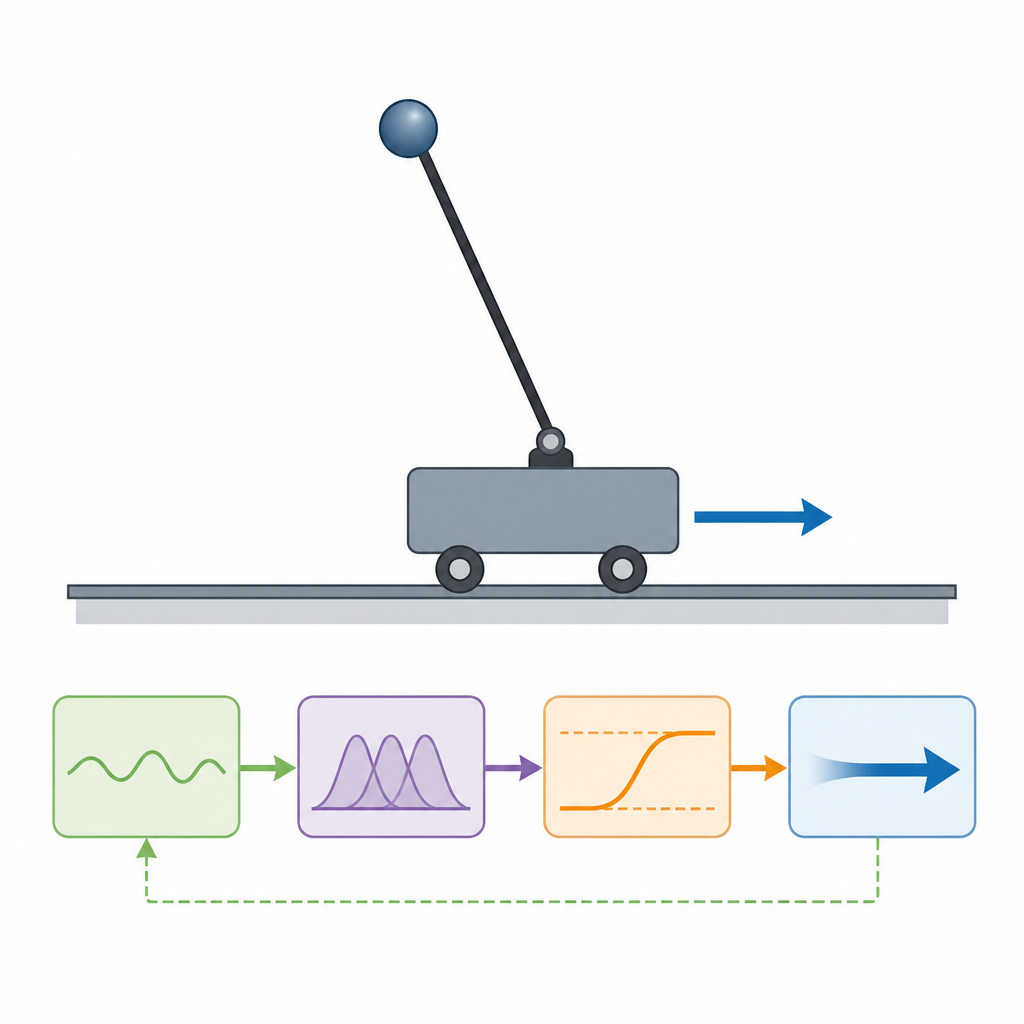
Die Autoren schlagen einen adaptiven Fuzzy-Sliding-Mode-Regler vor, der die Stärken beider Ansätze verbindet. Zunächst erstellen sie ein mathematisches Modell von Wagen und Pendel mit gängiger Mechanik, das zeigt, wie der Schub des Wagens und das Schwingen des Pendels eng miteinander verknüpft sind. Dann entwerfen sie eine geschichtete Zielbahn, eine sogenannte Sliding-Oberfläche, die der Aufrechterhaltung des Pendels Vorrang einräumt und gleichzeitig den Wagen zur gewünschten Position steuert. Darauf aufbauend beobachtet ein Fuzzy-Logik-System, wie weit das System vom Ziel entfernt ist und wie schnell es sich bewegt, und ersetzt das grobe Ein/Aus-Schalten durch ein glatteres Signal auf Basis einfacher regelsatzähnlicher Entscheidungen. Eine zweite Fuzzy-Schicht passt die Stärke der Regelung an, erhöht den Aufwand, wenn das Pendel weit abweicht, und verringert ihn, wenn die Balance näher rückt.
How the new controller behaves under stress
Die Forscher testen drei Ansätze in Computersimulationen: die traditionelle Sliding-Mode-Methode, eine fuzzy-basierte Sliding-Variante und ihren adaptiven Fuzzy-Sliding-Regler. Sie prüfen die Leistung unter Normalbedingungen, bei einem plötzlichen Stoß auf den Wagen und bei Änderungen von Masse und Länge, um Konstruktionsfehler oder Ladungsverschiebungen zu simulieren. Der einfache Sliding-Ansatz reagiert schnell, überschießt jedoch und zeigt starkes Chattering mit sehr hohen Stellkräften. Der fuzzy-basierte Sliding-Regler arbeitet glatter, kann aber an Genauigkeit verlieren, wenn sich die Parameter ändern. Der adaptive Fuzzy-Sliding-Regler hält Pendel und Wagen in allen Szenarien nahe an den gewünschten Werten, verwendet dabei den geringsten gesamten Stellaufwand und sorgt für sanfte, wohlgeordnetere Bewegungen.
What this means for future machines
Kurz gesagt zeigt die Studie, dass ein Regler, der seine Stärke mit fuzzy-regelähnlicher Logik anpasst, ein schwankendes System aufrecht halten, Störungen abwehren und dabei weniger Energie verbrauchen kann, ohne nervöse Zuckungen. Indem er seine Reaktion automatisch anpasst, wenn Fehler zunehmen oder abnehmen, bietet der adaptive Fuzzy-Sliding-Regler ein praktisches Rezept, um Leistung und Sanftheit in schwer zu regelnden Geräten auszubalancieren. Dieser Ansatz lässt sich über den Laborwagen mit Pendel hinaus auf mobile Roboter, Luftfahrzeuge und andere unteraktuierte Maschinen übertragen, die in einer sich verändernden und unsicheren Umgebung stabil bleiben müssen.
Zitation: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Schlüsselwörter: inverted pendulum, fuzzy control, sliding mode control, robust control, underactuated systems