Clear Sky Science · en
Adaptive fuzzy sliding mode control applied to inverted pendulum
Balancing a stick on a moving cart
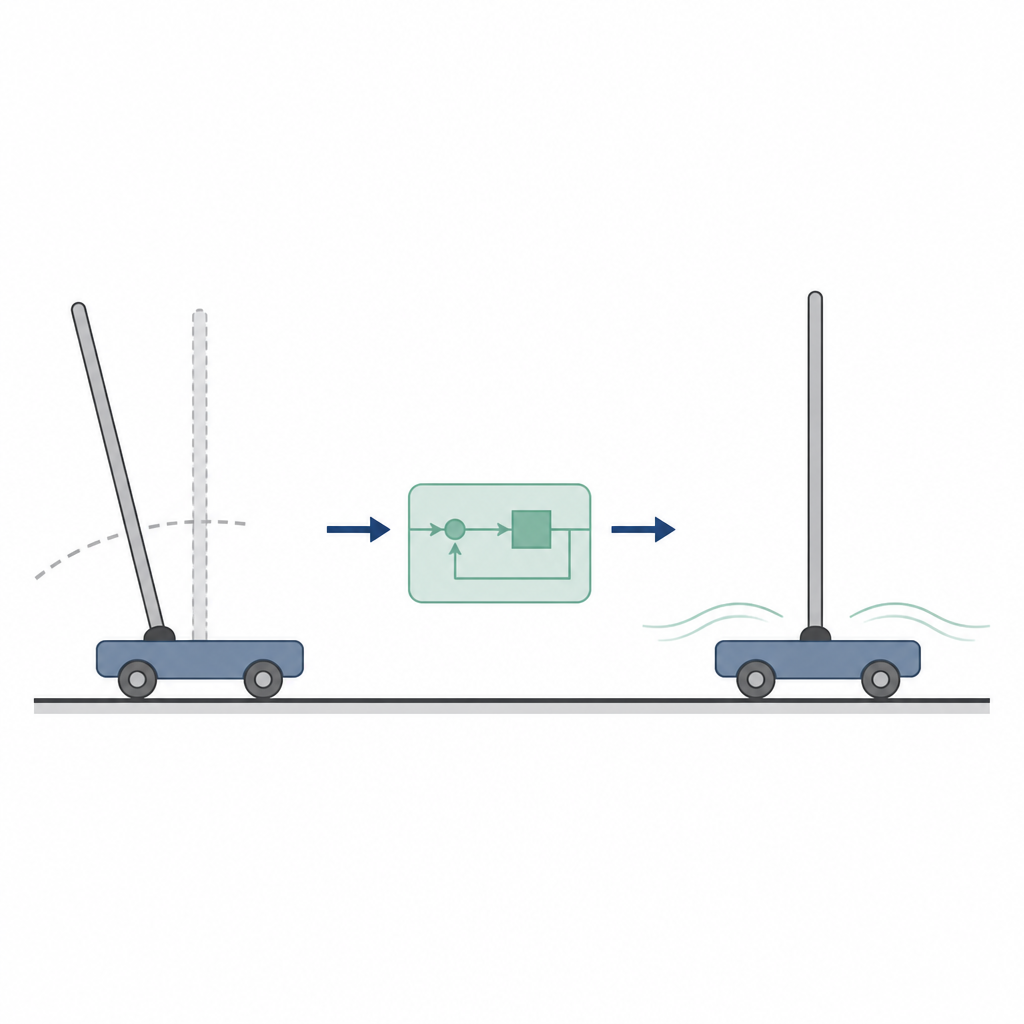
Imagine trying to balance a broom upright on your palm while also walking to a specific spot across the room. You must keep the broom from tipping while guiding your body to the right place, despite bumps in the floor or changes in the broom’s weight. This study tackles a similar challenge in engineering by teaching a moving cart to keep a rod standing upright and move smoothly to a target position, all while saving energy and handling surprises.
Why this balancing act matters
The cart with an upright pendulum is a classic test case for difficult control problems. It captures what happens in rockets, two wheeled robots, and even parts of humanoid robots, where a tall narrow body must stay upright on a moving base. The system is tricky because there is only one control force on the cart, yet both the cart’s motion and the pendulum’s angle must be managed at the same time. Small changes in mass, length, or friction can make the system unstable, so any control method must not only balance the pendulum but also stay reliable when the real world does not match the math perfectly.
From stiff control to smoother steering
Engineers have long used a method called sliding mode control to handle such uncertain systems. It works by forcing the system’s behavior onto a carefully chosen path and keeping it there, which makes it very robust to disturbances and modeling errors. However, this method tends to switch the control signal abruptly, leading to rapid back and forth motions called chattering. In practice, this can waste energy, wear out motors, and risk exciting unwanted vibrations. Softer methods using fuzzy logic can smooth out the control action, but they often lose some of the toughness needed when conditions change significantly.
Blending smart rules with robust control
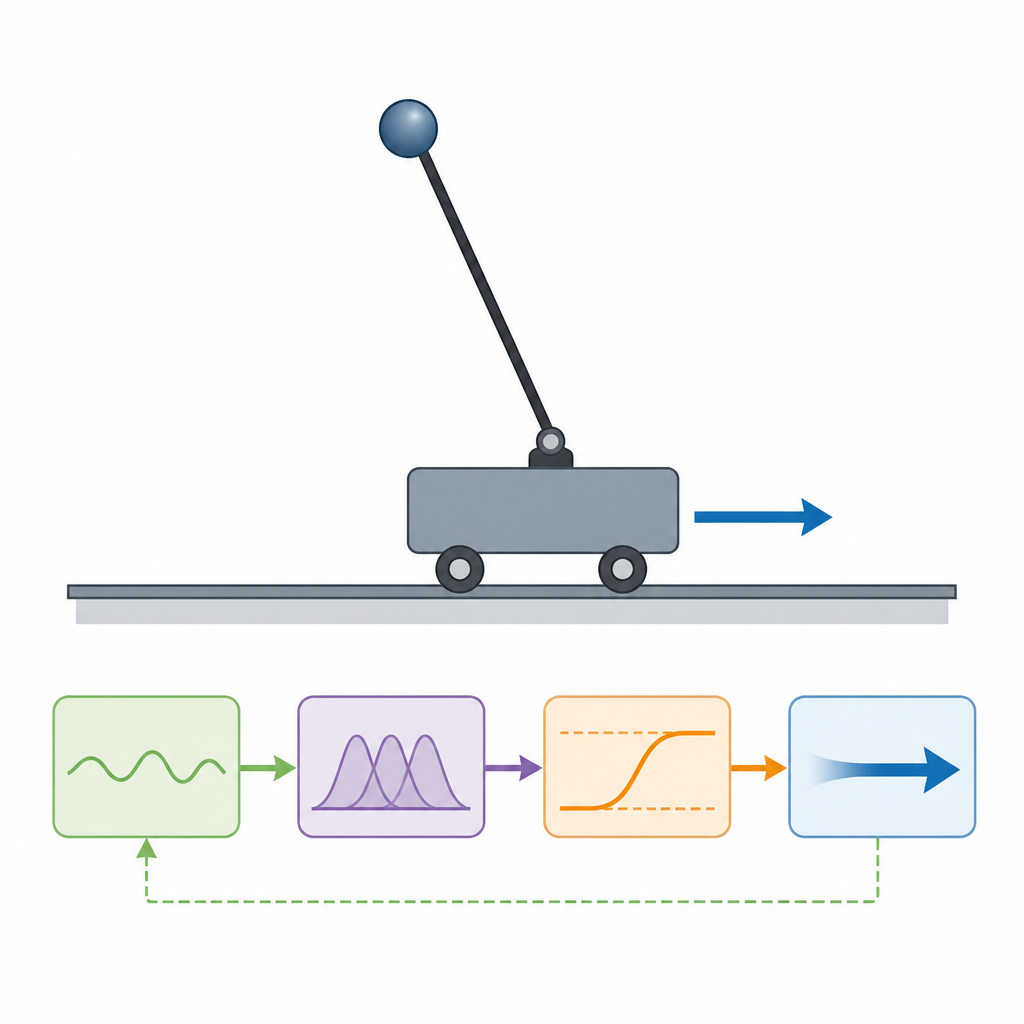
The authors propose an adaptive fuzzy sliding mode controller that blends the strengths of both worlds. First, they build a mathematical model of the cart and pendulum using standard mechanics, showing how the cart’s push and the pendulum’s swing are tightly linked. Then they design a layered target path, or sliding surface, that gives priority to keeping the pendulum upright while also steering the cart to its desired location. On top of this, a fuzzy logic system observes how far the system is from its goal and how fast it is moving, and uses simple rule like decisions to replace the harsh on off switching with a smoother signal. A second fuzzy layer adjusts how strong the controller should act, boosting effort when the pendulum drifts far from upright and easing off as it nears balance.
How the new controller behaves under stress
The researchers test three approaches in computer simulations: the traditional sliding mode method, a fuzzy sliding version, and their adaptive fuzzy sliding controller. They check performance in normal conditions, when a sudden push is applied to the cart, and when the system’s mass and length are changed to mimic design errors or payload shifts. The basic sliding approach responds quickly but overshoots and shows strong chattering, with very large control forces. The fuzzy sliding controller runs more smoothly but can lose some accuracy when the parameters change. The adaptive fuzzy sliding controller keeps the pendulum and cart close to their desired values across all scenarios, while using the smallest overall control effort, and maintaining gentle, well behaved motions.
What this means for future machines
In simple terms, the study shows that a controller that adapts its strength using fuzzy rule like reasoning can keep a wobbly system upright, reject disturbances, and use less energy, all without nervous twitching. By tuning its response automatically as errors grow or shrink, the adaptive fuzzy sliding controller offers a practical recipe for balancing performance and smoothness in devices that are hard to control. This approach can be extended beyond the lab cart and pendulum to mobile robots, aerial vehicles, and other underactuated machines that must stay stable in a changing and uncertain world.
Citation: Mohammed, T.K., Ezez, S.F., Siraj, A.Z. et al. Adaptive fuzzy sliding mode control applied to inverted pendulum. Sci Rep 16, 14938 (2026). https://doi.org/10.1038/s41598-026-45197-7
Keywords: inverted pendulum, fuzzy control, sliding mode control, robust control, underactuated systems