Clear Sky Science · zh
一种面向救援机器人地质灾害检测的轻量级跨尺度注意力网络
更智能的危险地带机器人
当地震、大雨或路基切割触发落石与滑坡时,人员前往侦查受损坡面和道路常有很大风险。本研究展示了一种新型“轻量级”视觉系统,能够帮助小型救援机器人在混乱场景中迅速识别危险障碍和地面失稳,即便机器人仅有有限的板载计算能力。
为什么识别危险这么难
真实世界的地质灾害形态多样:一块松动的巨石、坍塌的路缘、滑动的山坡或横在车道上的倒树。它们的颜色和纹理常与周围地形融为一体,恶劣天气、尘土和植被使视野更加杂乱。救援机器人必须使用体积小、能耗受限的计算平台,无法运行大型高耗能的人工智能模型。现有检测系统要么漏检小目标或易混淆的目标,要么模型太大无法高效在现场机器人上运行。

一种新的聚焦机器人视觉的方法
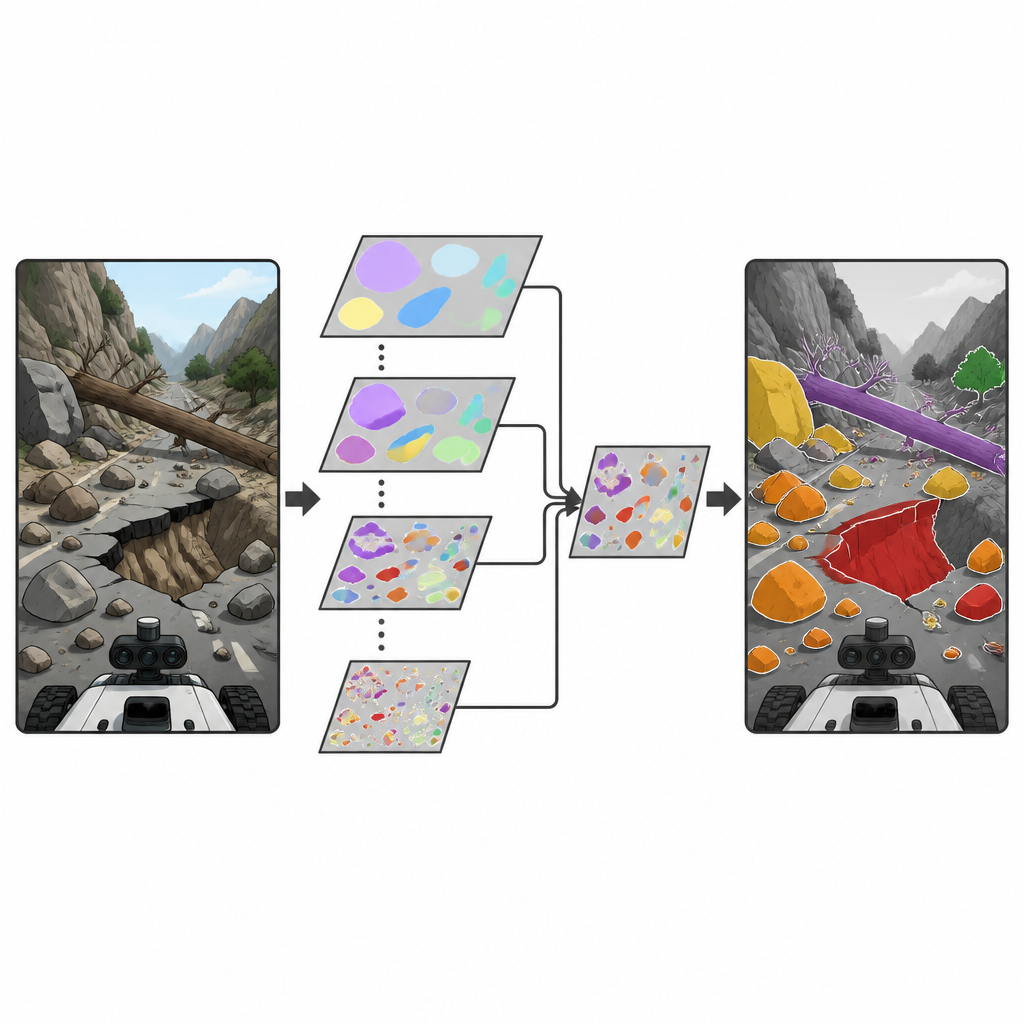
研究人员基于广泛用于图像与视频目标定位的实时检测器家族 YOLO,提出了一个新的模块:深度可分离选择核注意力(Depthwise Separable Selective Kernel Attention,DSSKA),并将其嵌入到紧凑的 YOLOv8n 网络中,形成 DSSKA-YOLOv8n 模型。通俗地说,该模块允许网络通过几种不同大小的“窗口”观察同一场景,然后自动决定在图像的每个位置哪种窗口大小最为重要。通过使用精简的计算方式,它在保持可训练参数数量较少的同时,提升了模型同时识别微小岩石和大范围坡面失稳的能力。
在真实山地场景上的训练
为验证方法,团队从中国四川省易发灾害的山路收集了定制图像集。该数据集包含四类主要危险:落石、倒树、滑坡与路基坍塌。研究人员通过旋转视角、改变光照、模拟模糊或部分遮挡等图像处理手段扩充并平衡数据集,以模拟恶劣天气和杂乱场景。随后在受控条件下训练并验证模型,使用标准指标评估其检测危险的准确率以及对目标轮廓的精确勾勒能力。
新模型的性能如何
与原始 YOLOv8n 网络相比,DSSKA-YOLOv8n 在总体检测质量上有所提升,而模型规模仅小幅增加。它也优于使用更传统注意力模块的变体,同时参数量约减少 61%。在四类危险中,该新模型在严格测试中取得了高精度和强劲评分,这些测试在预测与真实标注的不同重叠阈值下评估检测准确性。对于形态更清晰的坍塌路段和大面积滑坡尤其有效,尽管形状非常不规则的落石和与背景融合的树干仍然更难识别。可视化检查表明,改进后的网络更紧密地关注真实危险的轮廓与纹理,误报更少,对小目标的漏检也少于基线模型。
局限与后续工作
尽管取得这些进展,作者指出若干未解问题。目前系统在极小目标和界面混淆处仍表现不佳,例如岩石与阴影相接处,或路面标线与洪水泥沙类似岩堆时。它对更广阔场景的关注也有限,例如隧道口是否真表示坍塌。数据集仅来自单一地区,因此在截然不同的气候与地形中的表现尚不确定,模型也尚未在实际移动机器人上测试,在那种条件下速度、能耗以及在振动和灰尘下的可靠性都至关重要。
对未来救援的意义
总体而言,该研究提出了一个紧凑的视觉工具,帮助救援机器人在无需高性能计算机的前提下更好地识别危险地形特征。通过将场景的多尺度视角与高效注意力策略相结合,DSSKA-YOLOv8n 在保持适用于小型、能量受限设备的同时,向大型检测器的准确性靠近。借助更广泛的训练数据、增强的场景上下文感知以及在机器人平台上的实地测试,此类系统有望在灾后救援的关键时刻为响应者提供更快、更安全的坠滑坡和受损道路态势感知。
引用: Ren, K., Xiao, X., Ma, J. et al. A lightweight and cross-scale attention network for geological hazard detection in rescue robotics. Sci Rep 16, 14916 (2026). https://doi.org/10.1038/s41598-026-45112-0
关键词: 地质灾害, 救援机器人, 目标检测, 注意力网络, 滑坡监测