Clear Sky Science · pl
Lekka i wieloskalowa sieć uwag do wykrywania zagrożeń geologicznych w robotyce ratunkowej
Inteligentniejsze roboty dla niebezpiecznych terenów
Kiedy trzęsienia ziemi, ulewy lub roboty drogowe powodują obrywy skalne i osuwiska, często zbyt ryzykowne jest wysyłanie ludzi do rozpoznania uszkodzonych skarp i dróg. W tym badaniu pokazano, jak nowy „lekki” system wizyjny może pomóc małym robotom ratunkowym szybko wykrywać niebezpieczne przeszkody i uszkodzenia gruntu w takich chaotycznych scenach, nawet gdy roboty dysponują ograniczoną mocą obliczeniową na pokładzie.
Dlaczego wykrywanie zagrożeń jest tak trudne
Zagrożenia geologiczne w rzeczywistym terenie występują w wielu kształtach i rozmiarach: pojedynczy luźny głaz, osunięty brzeg drogi, zsuwający się stok czy drzewo leżące na jezdni. Ich kolory i faktury często mieszają się z otoczeniem, a zła pogoda, kurz i roślinność dodatkowo zaśmiecają obraz. Roboty ratunkowe pracują na kompaktowych komputerach i bateriach, więc nie mogą uruchamiać ogromnych, energochłonnych modeli sztucznej inteligencji. Istniejące systemy wykrywania albo pomijają małe lub trudne do rozróżnienia cele, albo są zbyt ciężkie, by działać wydajnie na polowym robocie.

Nowy sposób skupiania widzenia robota
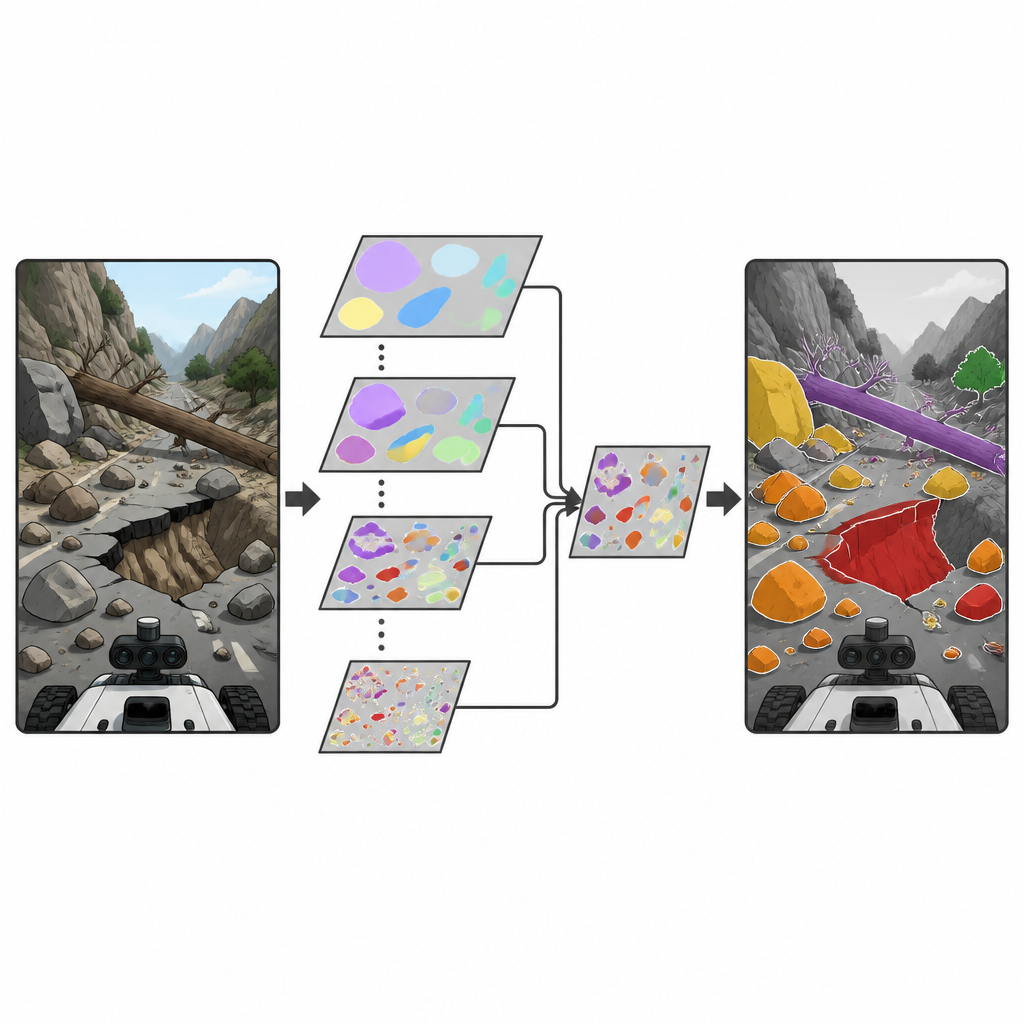
Naukowcy oparli się na popularnej rodzinie detektorów obiektów działających w czasie rzeczywistym znanej jako YOLO, szeroko stosowanej do wykrywania obiektów na obrazach i wideo. Wprowadzili nowy element konstrukcyjny nazwany Depthwise Separable Selective Kernel Attention (DSSKA), a następnie włączyli go do kompaktowej sieci YOLOv8n, tworząc model DSSKA-YOLOv8n. Mówiąc prościej, moduł ten pozwala sieci spojrzeć na tę samą scenę przez kilka okien o różnych rozmiarach, a następnie automatycznie zdecydować, który rozmiar okna jest najważniejszy w danym punkcie obrazu. Dzięki oszczędnej formie obliczeń utrzymuje niewielką liczbę parametrów do wytrenowania, jednocześnie zwiększając zdolność modelu do zauważania zarówno maleńkich kamyków, jak i szerokich osuwisk.
Trenowanie na rzeczywistych scenach górskich
Aby przetestować swoje podejście, zespół skompletował niestandardowy zbiór obrazów z dróg górskich podatnych na zagrożenia w prowincji Syczuan w Chinach. Zbiór danych zawiera cztery główne rodzaje niebezpieczeństw: obrywy skalne, powalone drzewa, osuwiska i zapadnięcia drogi. Rozszerzyli i zbalansowali tę kolekcję za pomocą starannego przetwarzania obrazu, takiego jak obracanie widoków, zmiana oświetlenia oraz symulacja rozmycia lub częściowego zaciemnienia, aby naśladować złą pogodę i zagracone sceny. Model następnie trenowano i weryfikowano w kontrolowanych warunkach, używając standardowych miar określających, jak często poprawnie wykrywa zagrożenia i jak precyzyjnie je wyznacza.
Jak dobrze działa nowy model
W porównaniu z oryginalną siecią YOLOv8n, DSSKA-YOLOv8n poprawia ogólną jakość wykrywania przy zwiększeniu rozmiaru modelu tylko o niewielki margines. Przewyższa też inną wersję wykorzystującą bardziej tradycyjny moduł uwagi, przy czym ma około 61 procent mniej parametrów. We wszystkich czterech typach zagrożeń nowy model osiąga wysoką precyzję i mocne wyniki w wymagających testach, które premiują dokładne wykrycie przy różnych poziomach nakładania się prognoz i danych rzeczywistych. Jest szczególnie skuteczny w przypadku wyraźniejszych wzorców, takich jak zapadnięcia dróg i duże osuwiska, choć bardzo nieregularne obrywy skalne i pnie drzew wtapiające się w tło wciąż pozostają trudniejsze. Inspekcje wizualne pokazują, że poprawiona sieć bardziej precyzyjnie skupia się na konturach i teksturach prawdziwych zagrożeń oraz generuje mniej fałszywych alarmów i pominięć małych obiektów niż baza wyjściowa.
Ograniczenia i kolejne kroki
Mimo tych postępów autorzy wymieniają kilka otwartych problemów. Obecny system wciąż ma trudności z ekstremalnie małymi obiektami i zmylającymi granicami, na przykład tam, gdzie kamienie i cienie się stykają, lub gdzie oznakowanie drogowe i wody powodziowe przypominają hałdy kamieni. System zwraca też ograniczoną uwagę na szerszy kontekst sceny, na przykład czy otwór tunelu rzeczywiście sygnalizuje zawalenie. Zbiór danych pochodzi z jednego regionu, więc niepewna jest wydajność w bardzo odmiennych klimatach i krajobrazach, a model nie był jeszcze testowany na rzeczywistym poruszającym się robocie, gdzie ważne są prędkość, zużycie energii i niezawodność przy wibracjach i zapyleniu.
Co to oznacza dla przyszłych akcji ratunkowych
Podsumowując, badanie przedstawia zwarty instrument wizyjny, który pomaga robotom ratunkowym lepiej wyłapywać niebezpieczne cechy terenu bez potrzeby stosowania ciężkich komputerów. Łącząc wieloskalowe obserwacje sceny z efektywną strategią uwagi, model DSSKA-YOLOv8n zbliża się do dokładności dużych detektorów, pozostając jednocześnie odpowiedni dla małych, energooszczędnych maszyn. Przy szerszych danych treningowych, dodaniu świadomości kontekstu sceny i testach w rzeczywistych warunkach na platformach robotycznych takie systemy mogłyby kiedyś zapewnić służbom szybszy i bezpieczniejszy wgląd w niestabilne stoki i uszkodzone drogi w decydujących godzinach po katastrofie.
Cytowanie: Ren, K., Xiao, X., Ma, J. et al. A lightweight and cross-scale attention network for geological hazard detection in rescue robotics. Sci Rep 16, 14916 (2026). https://doi.org/10.1038/s41598-026-45112-0
Słowa kluczowe: zagrożenia geologiczne, roboty ratunkowe, detekcja obiektów, sieci uwag, monitorowanie osuwisk