Clear Sky Science · he
רשת תשומת לב קלת משקל ורוחב-היקף לזיהוי סיכונים גיאולוגיים ברובוטיקה חפשנית
רובוטים חכמים יותר לאדמות מסוכנות
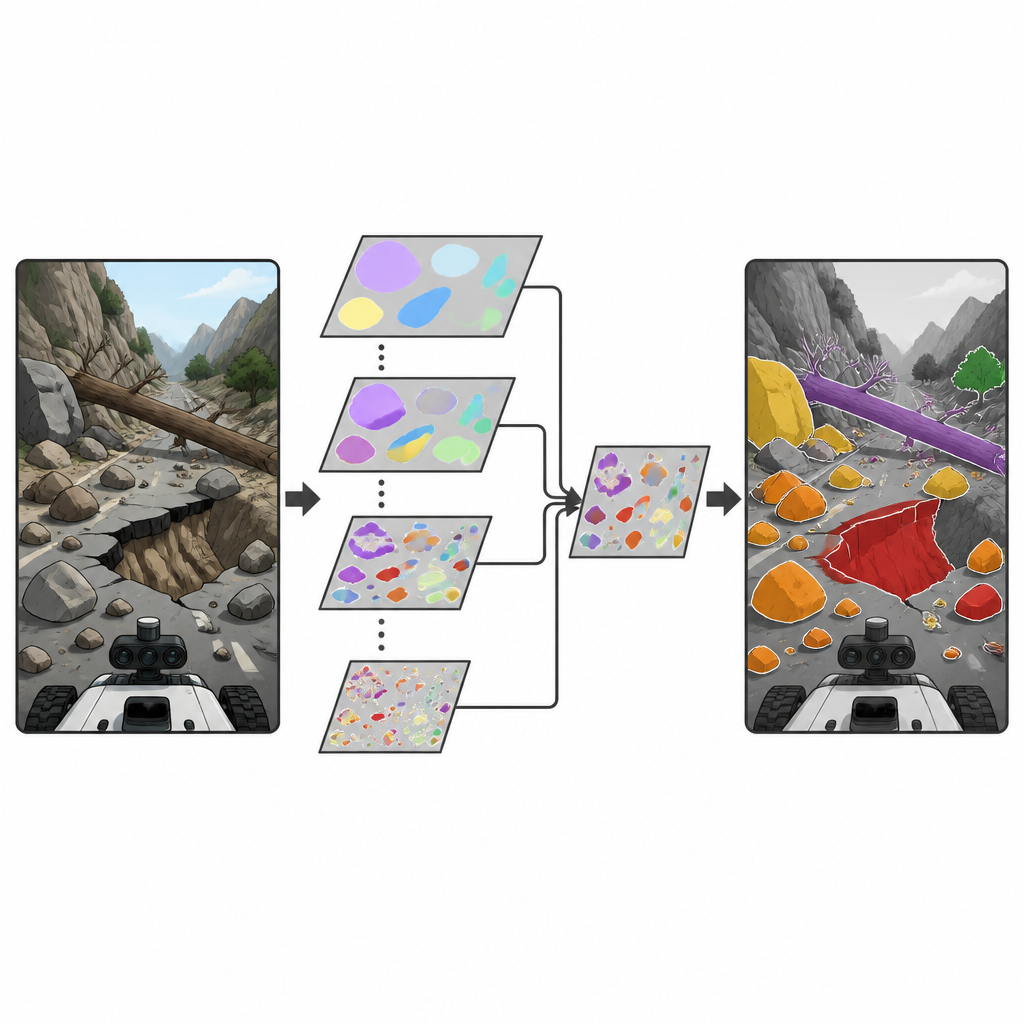
כשזעזועים, גשמים חזקים או כריתות דרך מעוררים נפילות סלעים ומפולות, לעתים קרובות מסוכן מדי לאנשים לסרוק מדרונות ודרכים שנפגעו. המחקר הזה מראה כיצד מערכת ראייה "קלה" חדשה יכולה לעזור לרובוטי הצלה קטנים לזהות במהירות מכשולים מסוכנים וכשלי קרקע בסצנות כאוטיות כאלה, גם כאשר הרובוטים מצוידים בכוח חישוב מוגבל על הסיפון.
למה קשה לזהות סכנות
סכנות גיאולוגיות בעולם האמיתי מופיעות בצורות וגדלים רבים: סלע בודד רופף, שפת דרך קרסה, מדרון שמתגלה, או עץ השוכב על נתיב. צבעיהן ומרקמיהן לרוב משתלבים עם השטח סביבן, ומזג אוויר גרוע, אבק וצמחייה מקשים עוד יותר על התצפית. רובוטי הצלה פועלים עם מחשבים וסוללות קומפקטיים, ולכן אינם יכולים להריץ מודלים כבדים ובעלי צריכת כוח גבוהה. מערכות גילוי קיימות או מפספסות מטרות קטנות או מבלבלות, או שהן כבדות מדי להיות מופעלות ביעילות על רובוט בשטח.

דרך חדשה למקד את ראיית הרובוט
החוקרים בונים על משפחת גלאים בזמן-אמת פופולרית המוכרת כ‑YOLO, שהיא נפוצה לזיהוי עצמים בתמונות ווידאו. הם מציגים יחידת בניין חדשה שנקראת מודול תשומת לב ברירה עם ערוץ נפרד עומקי (Depthwise Separable Selective Kernel Attention - DSSKA), ואז משיבים אותו לרשת קומפקטית YOLOv8n כדי ליצור את המודל DSSKA-YOLOv8n. בפשטות, המודול הזה מאפשר לרשת להסתכל על אותה סצנה דרך כמה "חלונות" בגדלים שונים ואז להחליט באופן אוטומטי איזה גודל חלון חשוב בכל נקודה בתמונה. באמצעות צורת חישוב חסכונית, הוא שומר על מספר הפרמטרים הניתנים לאימון נמוך תוך שיפור יכולת המודל לשים לב גם לסלעים זעירים וגם לכשלים רחבי היקף במדרון.
אימון בסצנות הרריות אמיתיות
כדי לבחון את הגישה שלהם, הצוות אסף אוסף תמונות מותאם מדרכי הרים בסיכון במחוז סצ'ואן, סין. מאגר הנתונים מכיל ארבעה סוגי סכנה עיקריים: נפילות סלעים, עצים שנפלו, מפולות קרקע וקריסות דרך. הם הרחיבו ואיזנו את האוסף באמצעות עיבוד תמונה זהיר, כגון סיבוב תמונות, שינוי תאורה, וסימולציה של טשטוש או חסימה חלקית, כדי לחקות מזג אוויר גרוע וסצנות מבולגנות. לאחר מכן אומן המודל ונבדק בתנאים מבוקרים, באמצעות מדדים סטנדרטיים שמודדים כמה לעתים הוא מוצא סכנות נכון וכמה במדויק הוא מתאר אותן.
כמה טוב המודל החדש מתפקד
בהשוואה לרשת YOLOv8n המקורית, DSSKA-YOLOv8n מעלה את איכות הגילוי הכוללת תוך הגדלת גודל המודל רק בשוליים קטנים. הוא גם מבצע טוב יותר מאשר גרסה אחרת שמשתמשת במודול תשומת לב מסורתי יותר, אך עם כ־61 אחוז פחות פרמטרים. בכל ארבעת סוגי הסכנה, המודל החדש מגיע לדיוק גבוה ולציונים חזקים במבחנים תובעניים שמעניקים יתרון לגילוי מדויק ברמות חפיפה שונות בין הניבויים לאמת השטח. הוא מוכיח את עצמו במיוחד עבור דפוסים ברורים כמו דרכים קרסות ומפולות גדולות, אם כי נפילות סלעים לא סדירות וגזעי עצים שמתמזגים עם הרקע נשארים קשים יותר. בדיקות ויזואליות מראות שהרשת המשופרת מתמקדת ביתר דיוק בקווי המתאר ובמרקמים של סכנות אמיתיות ומייצרת פחות אזעקות שווא וחסרות של מטרות קטנות לעומת הבסיס.
מגבלות ושלבים הבאים
למרות השיפורים, המחברים מזהים מספר בעיות פתוחות. המערכת הנוכחית עדיין מתקשה עם עצמים זעירים במיוחד וגבולות מבלבלים, למשל במקומות שבהם סלעים וצללים נפגשים, או כשסימוני דרך ומי הצפה דומים לערימות סלע. היא גם נותנת תשומת לב מוגבלת לסצנה הרחבה יותר, כמו האם פתיחת מנהרה באמת מצביעה על קריסה. מאגר הנתונים מגיע מאזור אחד, כך שעמידה בביצועים באקלימים ונופים שונים אינה ודאית, והמודל עדיין לא נבדק על רובוט נייד אמיתי, שבו מהירות, צריכת חשמל ואמינות תחת רטט ואבק כולם חשובים.
מה זה אומר להצלות בעתיד
בסך הכל, המחקר מציג כלי ראייה קומפקטי שעוזר לרובוטי הצלה לזהות טוב יותר תכונות שטח מסוכנות מבלי להזדקק למחשבים כבדים. על‑ידי שילוב מבטים רב‑קנה מידה על הסצנה עם אסטרטגיית תשומת לב יעילה, מודל DSSKA-YOLOv8n מתקרב לדיוק של גלאים גדולים תוך שהוא נשאר מתאים למכונות קטנות ומוגבלות אנרגטית. עם הרחבת נתוני האימון, הוספת מודעות להקשר הסצנה ובחינה במציאות על פלטפורמות רובוטיות, מערכות כאלה עשויות יום אחד לספק למגיבים תובנה מהירה ובטוחה יותר על מדרונות בלתי יציבים ודרכים פגועות בשעות הקריטיות שאחרי אסון.
ציטוט: Ren, K., Xiao, X., Ma, J. et al. A lightweight and cross-scale attention network for geological hazard detection in rescue robotics. Sci Rep 16, 14916 (2026). https://doi.org/10.1038/s41598-026-45112-0
מילות מפתח: סכנות גיאולוגיות, רובוטי הצלה, זיהוי עצמים, רשתות תשומת לב, ניטור מפולות