Clear Sky Science · sv
Ett lättviktigt och tvärskaligt uppmärksamhetsnätverk för detektion av geologiska faror i räddningsrobotik
Smartare robotar för farliga områden
När jordbävningar, kraftiga regn eller vägskärningar utlöser stenras och jordskred är det ofta för riskabelt för människor att rekognoscera skadade sluttningar och vägar. Denna studie visar hur ett nytt ”lättviktigt” visionsystem kan hjälpa små räddningsrobotar att snabbt upptäcka farliga hinder och markfel i sådana kaotiska scener, även när robotarna bara har begränsad beräkningskraft ombord.
Varför det är så svårt att upptäcka faror
Geologiska faror i verkligheten förekommer i många former och storlekar: en ensam lös sten, ett kollapsat vägavsnitt, en sluttning som ger efter eller ett träd som ligger över ett körfält. Deras färger och texturer smälter ofta in i omgivande terräng, och dåligt väder, damm och växtlighet gör bilden ännu stökigare. Räddningsrobotar måste arbeta med kompakta datorer och batterier, så de kan inte köra stora, strömslukande AI-modeller. Befintliga detekteringssystem missar antingen små eller förvillande mål eller är för tunga för att köras effektivt på en robot i fält.

En ny metod för att fokusera robotens syn
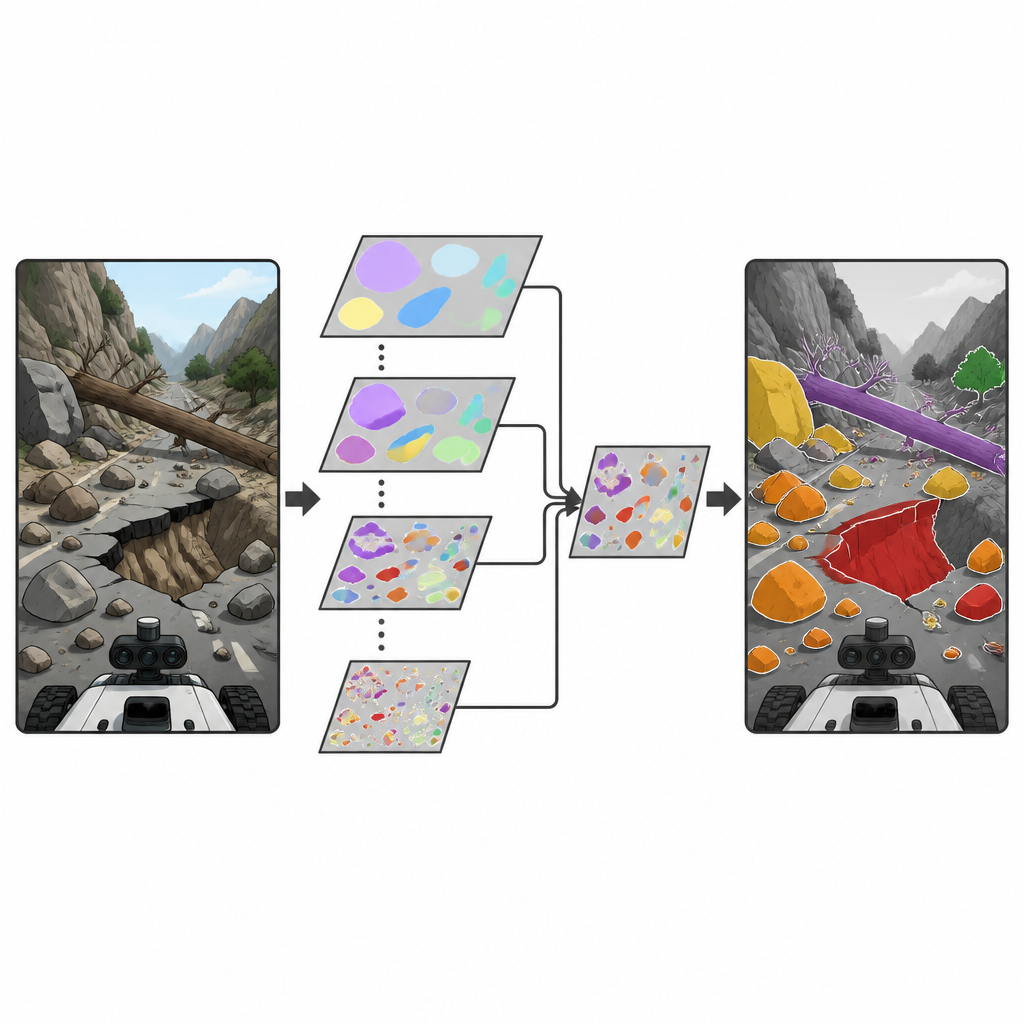
Forskarna bygger vidare på en populär familj av realtidsobjektdetektorer kända som YOLO, som ofta används för att hitta objekt i bilder och video. De introducerar en ny byggsten kallad Depthwise Separable Selective Kernel Attention (DSSKA)-modulen och integrerar den i ett kompakt YOLOv8n-nätverk för att skapa DSSKA-YOLOv8n-modellen. Enkelt uttryckt låter denna modul nätverket betrakta samma scen genom flera olika stora ”fönster” och sedan automatiskt avgöra vilken fönsterstorlek som är viktigast i varje punkt i bilden. Genom att använda en slimmad form av beräkning håller den antalet träningsbara parametrar lågt samtidigt som modellens förmåga att upptäcka både pyttesmå stenar och omfattande sluttningras skärps.
Träning på verkliga bergsscener
För att testa sin metod satte teamet ihop en anpassad bildsamling från faropräglade bergsvägar i Sichuanprovinsen i Kina. Datamängden innehåller fyra huvudtyper av fara: stenras, nedfallna träd, jordskred och vägkollapser. De utökade och balanserade denna samling med noggrann bildbehandling, som att rotera vyer, ändra ljussättning och simulera oskärpa eller partiell blockering, för att efterlikna dåligt väder och röriga scener. Modellen tränades och utvärderades sedan under kontrollerade förhållanden, med standardmått för hur ofta den hittar faror korrekt och hur precist den avgränsar dem.
Hur bra presterar den nya modellen
Jämfört med det ursprungliga YOLOv8n-nätverket höjer DSSKA-YOLOv8n den övergripande detektionskvaliteten samtidigt som modellstorleken bara ökar marginellt. Den överträffar också en annan variant som använder en mer traditionell uppmärksamhetsmodul, men med ungefär 61 procent färre parametrar. För samtliga fyra farotyper når den nya modellen hög precision och starka resultat i krävande tester som belönar noggrann detektion vid många överlappningsnivåer mellan förutsägelser och referensdata. Den visar sig särskilt effektiv för tydligare mönster som kollapsade vägar och stora jordskred, även om mycket oregelbundna stenras och trädstammar som flyter in i bakgrunden fortfarande är svårare. Visuella inspektioner visar att det förbättrade nätverket fokuserar tätare på konturer och texturer hos verkliga faror och ger färre falsklarm och färre missade små mål än baseline
Begränsningar och nästa steg
Trots dessa framsteg identifierar författarna flera öppna problem. Det nuvarande systemet har fortfarande svårigheter med extremt små objekt och förvirrande gränser, till exempel där stenar och skuggor möts eller där vägmarkeringar och översvämningsvatten liknar stenansamlingar. Det ägnar sig också begränsad uppmärksamhet åt den bredare scenen, såsom om en tunnelöppning verkligen signalerar en kollaps. Datamängden kommer från en enda region, så prestandan i mycket olika klimat och landskap är osäker, och modellen har ännu inte testats på en verklig rörlig robot där hastighet, energiförbrukning och tillförlitlighet vid vibrationer och damm har betydelse.
Vad detta betyder för framtida räddningsinsatser
Sammanfattningsvis presenterar studien ett kompakt visionsverktyg som hjälper räddningsrobotar att bättre urskilja farliga terrängdrag utan att kräva tungviktiga datorer. Genom att kombinera fler-skaliga vyer av scenen med en effektiv uppmärksamhetsstrategi närmar sig DSSKA-YOLOv8n noggrannheten hos stora detektorer samtidigt som den förblir lämplig för små, energibegränsade maskiner. Med bredare träningsdata, ökad scenkontektsmedvetenhet och verkliga tester på robotplattformar kan sådana system en dag ge insatspersonal snabbare och säkrare insikt i instabila sluttningar och skadade vägar i de avgörande timmarna efter en katastrof.
Citering: Ren, K., Xiao, X., Ma, J. et al. A lightweight and cross-scale attention network for geological hazard detection in rescue robotics. Sci Rep 16, 14916 (2026). https://doi.org/10.1038/s41598-026-45112-0
Nyckelord: geologiska faror, räddningsrobotar, objektdetektering, uppmärksamhetsnätverk, övervakning av jordskred