Clear Sky Science · ru
Легкая и кросс-масштабная сеть внимания для обнаружения геологических опасностей в спасательной робототехнике
Более умные роботы для опасных ландшафтов
Когда землетрясения, ливни или откосы дороги вызывают камнепады и оползни, людям часто слишком опасно обследовать поврежденные склоны и дороги. В этом исследовании показано, как новая «легкая» система зрения может помочь небольшим спасательным роботам быстро обнаруживать опасные препятствия и разрушения грунта в таких хаотичных сценах, даже когда у роботов ограничена бортовая вычислительная мощность.
Почему обнаруживать опасности так сложно
Геологические опасности в реальном мире имеют множество форм и масштабов: один ослабленный валун, обрушившийся край дороги, сползающий склон или поваленное дерево, перегораживающее полосу. Их цвета и текстуры часто сливаются с окружающей местностью, а плохая погода, пыль и растительность делают изображение еще более загроможденным. Спасательным роботам приходится работать с компактными компьютерами и батареями, поэтому они не могут запускать объёмные энергозатратные модели искусственного интеллекта. Существующие системы обнаружения либо пропускают мелкие и запутанные цели, либо слишком «тяжелы» для эффективной работы на поле.

Новый способ сосредоточить зрение робота
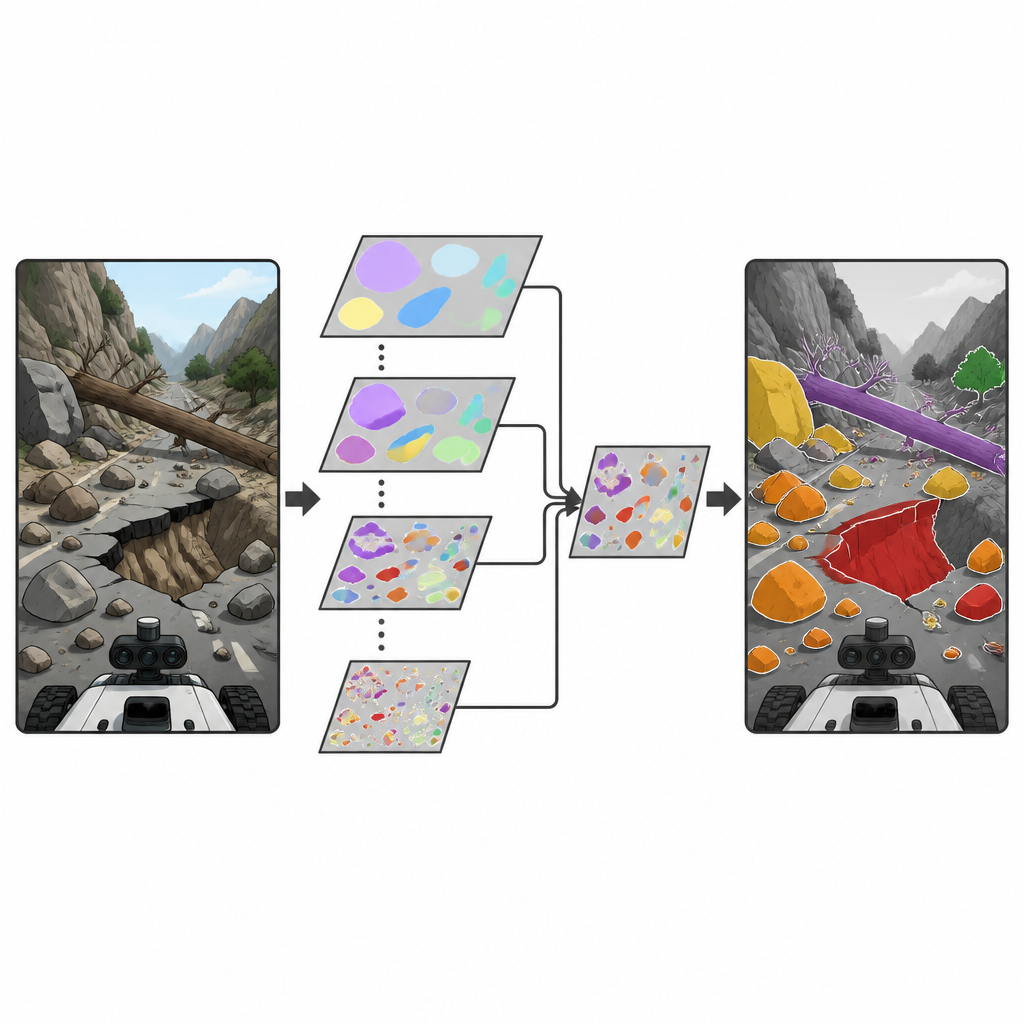
Исследователи опираются на популярное семейство детекторов в реальном времени, известное как YOLO, широко используемое для поиска объектов на изображениях и в видео. Они вводят новый блок под названием Depthwise Separable Selective Kernel Attention (DSSKA) и интегрируют его в компактную сеть YOLOv8n, создав модель DSSKA-YOLOv8n. Проще говоря, этот модуль позволяет сети смотреть на сцену одновременно через несколько «окон» разного размера и затем автоматически решать, какой размер окна важен в каждой точке изображения. Используя экономную форму вычислений, он сохраняет небольшое число обучаемых параметров, одновременно повышая способность модели замечать и крошечные камни, и широкие нарушения склонов.
Обучение на реальных горных сценах
Для проверки подхода команда собрала собственную коллекцию изображений с опасных горных дорог провинции Сычуань, Китай. Набор данных содержит четыре основных типа опасностей: камнепады, поваленные деревья, оползни и обрушения дорог. Они расширили и сбалансировали этот набор с помощью тщательной обработки изображений — поворотов, изменения освещения и моделирования размытия или частичного перекрытия — чтобы имитировать плохую погоду и загроможденные сцены. Модель затем обучали и проверяли в контролируемых условиях, используя стандартные метрики того, как часто она правильно находит опасности и насколько точно их очерчивает.
Насколько хорошо работает новая модель
По сравнению с исходной сетью YOLOv8n, DSSKA-YOLOv8n повышает общую точность обнаружения при увеличении размера модели лишь на небольшую величину. Она также превосходит другую версию с более традиционным модулем внимания, при этом имея примерно на 61 процент меньше параметров. По всем четырем типам опасностей новая модель достигает высокой точности и сильных показателей в требовательных тестах, которые оценивают точность при различных уровнях перекрытия между предсказаниями и эталонными разметками. Она особенно эффективна для более отчетливых паттернов, таких как обрушенные участки дороги и крупные оползни, хотя очень неправильные камнепады и стволы деревьев, сливающиеся с фоном, по‑прежнему остаются более сложной задачей. Визуальные проверки показывают, что улучшенная сеть более четко фокусируется на контурах и текстурах реальных опасностей и реже дает ложные срабатывания и пропускает мелкие цели по сравнению с базовой версией.
Ограничения и дальнейшие шаги
Несмотря на эти достижения, авторы выделяют несколько открытых проблем. Текущая система по-прежнему испытывает трудности с чрезвычайно маленькими объектами и запутанными границами, например в местах стыка камней и теней, или где дорожная разметка и подтопления напоминают завалы камней. Она также уделяет ограниченное внимание более широкому контексту сцены, например тому, действительно ли отверстие туннеля сигнализирует об обрушении. Набор данных собран из одного региона, поэтому его работоспособность в очень иных климатах и ландшафтах остается неясной, и модель еще не протестирована на реальном движущемся роботе, где важны скорость, энергопотребление и надежность при вибрации и запылении.
Что это значит для будущих спасательных операций
В целом исследование представляет компактный инструмент зрения, который помогает роботам-спасателям лучше выделять опасные элементы рельефа без необходимости в тяжеловесных вычислениях. Объединив мульти-масштабные представления сцены с эффективной стратегией внимания, модель DSSKA-YOLOv8n приближается по точности к крупным детекторам, оставаясь при этом пригодной для небольших устройств с ограниченной энергией. С расширением обучающей выборки, добавлением учета контекста сцены и полевыми испытаниями на робот-платформах такие системы в будущем смогут быстрее и безопаснее предоставлять спасателям информацию о нестабильных склонах и поврежденных дорогах в решающие часы после катастрофы.
Цитирование: Ren, K., Xiao, X., Ma, J. et al. A lightweight and cross-scale attention network for geological hazard detection in rescue robotics. Sci Rep 16, 14916 (2026). https://doi.org/10.1038/s41598-026-45112-0
Ключевые слова: геологические опасности, роботы-спасатели, обнаружение объектов, сети внимания, мониторинг оползней