Clear Sky Science · ja
救助ロボット向け地質災害検出のための軽量かつクロススケール注意ネットワーク
危険な地形に対応するより賢いロボット
地震、大雨、道路切土などで落石や土砂崩れが発生すると、損傷した斜面や道路を人が偵察するのはしばしば危険すぎます。本研究は、新しい「軽量」ビジョンシステムが、小型の救助ロボットが限定的な搭載計算資源しか持たない場合でも、混乱した現場で危険な障害物や地盤破壊を素早く検出するのに役立つことを示します。
なぜ危険の発見が難しいのか
実世界の地質災害は多種多様です:単独の緩んだ岩塊、崩落した道路端、崖が崩れかかる斜面、あるいは車線をふさぐ倒木など。その色や質感は周囲の地形に溶け込みやすく、悪天候、粉塵、植生が視界をさらに乱します。救助ロボットは小型のコンピュータとバッテリーで動作するため、巨大で電力を消費するAIモデルは使えません。既存の検出システムは、小さく紛らわしいターゲットを見逃すか、現場で効率的に動作するには重すぎるという問題があります。

ロボット視覚を絞る新しい方法
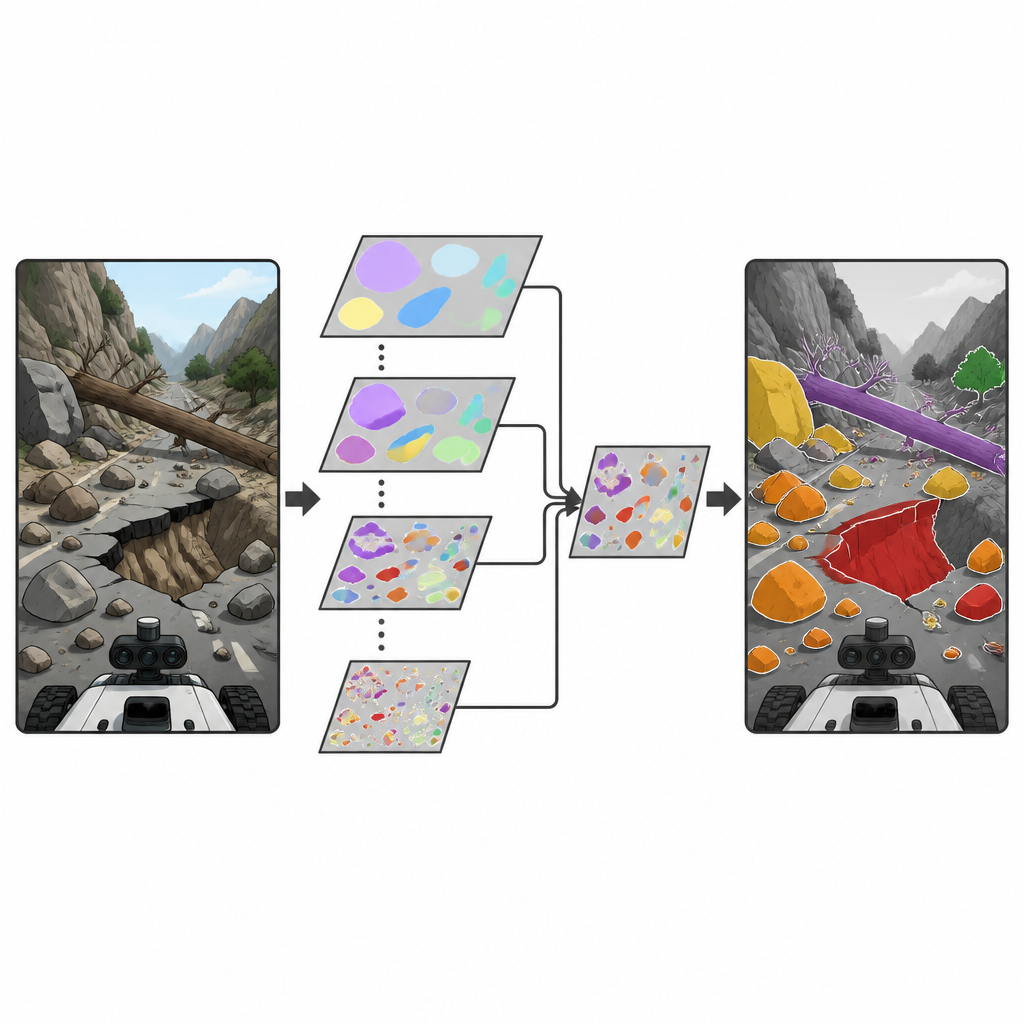
研究者らは、画像や映像中の物体検出で広く使われるリアルタイム検出器群であるYOLOを基盤に構築しました。彼らはDepthwise Separable Selective Kernel Attention(DSSKA)モジュールという新しい構成要素を導入し、それをコンパクトなYOLOv8nネットワークに組み込んでDSSKA-YOLOv8nモデルを作成しました。簡単に言えば、このモジュールはネットワークが同じシーンを複数の異なるサイズの「窓」で見ることを可能にし、画像の各点でどの窓サイズが最も重要かを自動的に選択します。計算を簡素化することで学習パラメータ数を抑えつつ、小さな石から広範な斜面崩壊までを検出する能力を高めます。
実際の山岳風景での学習
手法を検証するため、チームは中国・四川省の災害多発山道からカスタム画像コレクションを作成しました。データセットは落石、倒木、土砂崩れ、道路崩落の4種類の主要な危険を含みます。視点の回転、照明の変更、ぼかしや部分的な遮蔽のシミュレーションなどの慎重な画像処理でこのコレクションを拡張・均衡化し、悪天候や雑多な現場を模倣しました。モデルは標準的な指標で、危険を正しく検出する頻度と輪郭の精度を評価しながら訓練および検証されました。
新モデルの性能
元のYOLOv8nネットワークと比較して、DSSKA-YOLOv8nは全体的な検出品質を向上させつつ、モデルサイズの増加はわずかでした。従来型の注意モジュールを使った別バージョンよりも高性能でありながら、パラメータ数は約61%少なくなっています。4種類すべての危険タイプで、新モデルは高い精度と、予測と正解の重なりに対する厳しい評価で高スコアを達成しました。崩落した道路や大規模な土砂崩れのような明瞭なパターンでは特に効果的ですが、非常に不規則な落石や背景に溶け込む倒木の検出は依然として難しいことが分かりました。可視化による検査では、改良されたネットワークは実際の危険物の輪郭や質感により厳密に注目し、ベースラインより誤警報や小さなターゲットの見逃しが少ないことが示されました。
限界と今後の課題
こうした進展にもかかわらず、著者らは幾つかの未解決課題を指摘しています。現在のシステムは極めて小さな物体や、岩と影の境界、道路標識と冠水が岩の堆積に似るような紛らわしい境界で苦戦します。また、トンネルの開口部が本当に崩落を示しているかなど、より広い場面文脈への注意は限定的です。データセットが単一地域に由来するため、非常に異なる気候や地形での性能は不確かであり、振動や粉塵下での速度・電力消費・信頼性が重要になる実際の移動ロボット上での試験はまだ行われていません。
将来の救助活動への意味
総じて、本研究は重い計算機を必要とせずに救助ロボットが危険な地形特徴をより良く識別できるコンパクトなビジョンツールを提示します。シーンのマルチスケールビューと効率的な注意戦略を組み合わせることで、DSSKA-YOLOv8nモデルは大規模な検出器と近い精度を目指しつつ、小型でエネルギー制約のある機器に適したままです。より広範な学習データ、場面文脈への認識追加、ロボットプラットフォームでの実地試験が加われば、こうしたシステムは災害後の重要な時間帯に不安定な斜面や損傷した道路に関するより迅速で安全な洞察を救助者に提供する可能性があります。
引用: Ren, K., Xiao, X., Ma, J. et al. A lightweight and cross-scale attention network for geological hazard detection in rescue robotics. Sci Rep 16, 14916 (2026). https://doi.org/10.1038/s41598-026-45112-0
キーワード: 地質災害, 救助ロボット, 物体検出, 注意ネットワーク, 土砂崩れモニタリング