Clear Sky Science · tr
Kurtarma robotlarında jeolojik tehlike tespiti için hafif ve çok ölçekli dikkat ağı
Tehlikeli arazi için daha akıllı robotlar
Depremler, yoğun yağışlar veya yol kazıları kaya düşmelerine ve heyelanlara yol açtığında, hasar görmüş yamaçları ve yolları incelemek genellikle insanlar için çok risklidir. Bu çalışma, yeni bir “hafif” görme sisteminin, robotların sınırlı yerel hesaplama gücüne sahip olsalar bile, küçük kurtarma robotlarının kaotik sahnelerde tehlikeli engelleri ve zemin arızalarını hızla tespit etmelerine nasıl yardımcı olabileceğini gösteriyor.
Tehlikeleri fark etmenin zorluğu
Gerçek dünyadaki jeolojik tehlikeler çok çeşitli biçim ve boyutlarda ortaya çıkar: tek bir gevşek kaya, çökmüş yol kenarı, kayan bir yamacı veya şeridi kaplayan bir ağaç. Renk ve doku genellikle çevreyle karışır; kötü hava, toz ve bitki örtüsü görüşü daha da karmaşık hale getirir. Kurtarma robotları kompakt bilgisayarlar ve pillerle çalışmak zorunda olduğundan, büyük ve enerji tüketen yapay zeka modellerini kullanamazlar. Mevcut tespit sistemleri ya küçük ya da kafa karıştırıcı hedefleri kaçırır ya da alanda bir robot üzerinde verimli çalışacak kadar hafif değildir.

Robot görüşünü odaklamanın yeni bir yolu
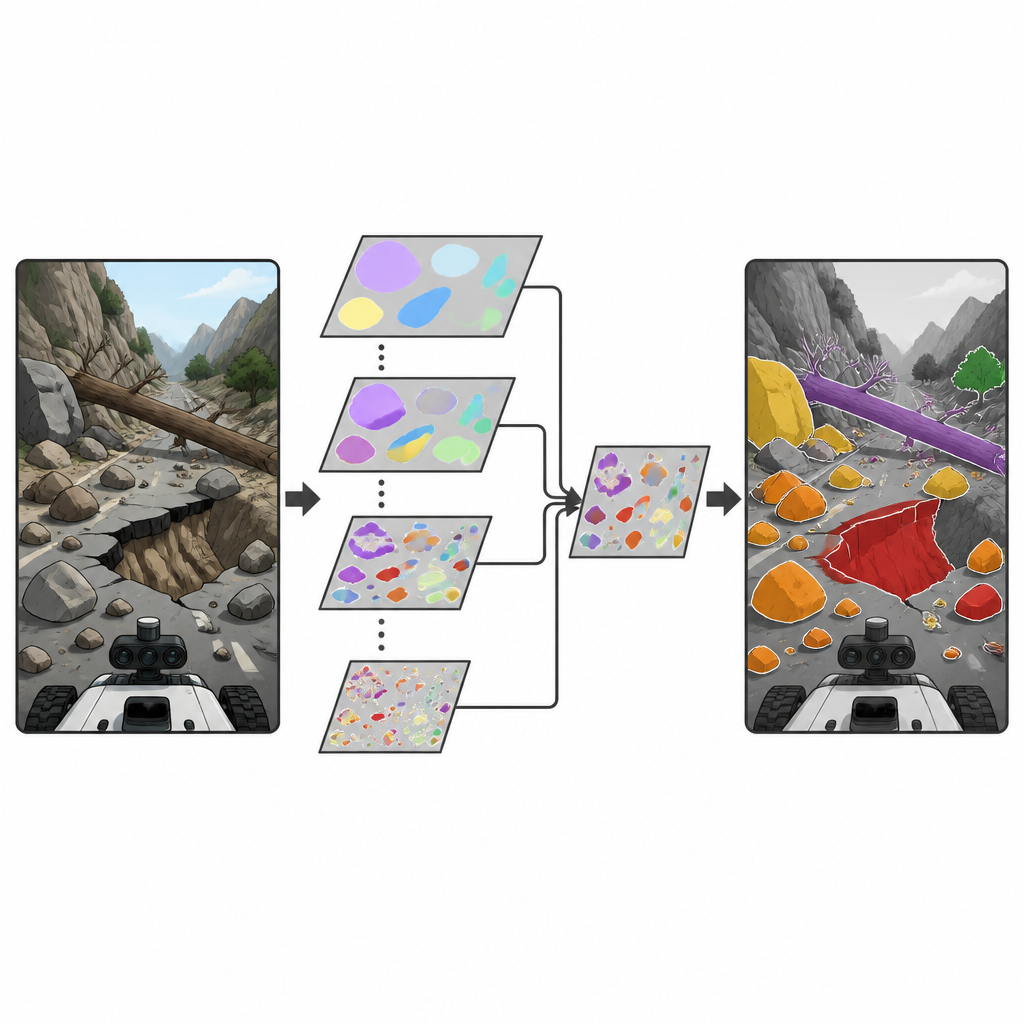
Araştırmacılar, görüntülerde ve videolarda nesneleri bulmak için yaygın olarak kullanılan gerçek zamanlı nesne algılayıcıları ailesi YOLO üzerine inşa ediyor. Depthwise Separable Selective Kernel Attention (DSSKA) adlı yeni bir yapı bloğu tanıtıyorlar ve bunu kompakt bir YOLOv8n ağına entegre ederek DSSKA-YOLOv8n modelini oluşturuyorlar. Basitçe söylemek gerekirse, bu modül ağa aynı sahneye farklı boyutlarda “pencereler” aracılığıyla bakma ve görüntünün her noktasında hangi pencere boyutunun daha önemli olduğunu otomatik olarak belirleme imkânı veriyor. İnce, hesaplama açısından verimli bir yaklaşım kullanarak öğrenilebilir parametre sayısını düşük tutarken hem küçük kayaları hem de geniş yamaç çökmelerini fark etme yeteneğini keskinleştiriyor.
Gerçek dağ sahnelerinde eğitim
Yaklaşımlarını test etmek için ekip, Çin’in Sichuan Eyaleti’ndeki tehlikeli dağ yollarından özel bir görüntü koleksiyonu derledi. Veri kümesi kaya düşmesi, devrilmiş ağaçlar, heyelan ve yol çökmesi olmak üzere dört ana tehlike türünü içeriyor. Kötü hava ve dağınık sahneleri taklit etmek için görüntüleri döndürme, aydınlatma değiştirme, bulanıklık veya kısmi örtülme simülasyonu gibi dikkatli görüntü işleme ile bu koleksiyonu genişlettiler ve dengelediler. Model daha sonra standart doğru bulma ve hassas sınırlandırma ölçütleri kullanılarak kontrollü koşullarda eğitildi ve değerlendirildi.
Yeni modelin performansı
Orijinal YOLOv8n ağıyla karşılaştırıldığında DSSKA-YOLOv8n, model boyutunu yalnızca küçük bir farkla artırırken genel tespit kalitesini yükseltiyor. Ayrıca daha geleneksel bir dikkat modülü kullanan başka bir versiyonu da yaklaşık %61 daha az parametreyle geride bırakıyor. Tüm dört tehlike türü genelinde yeni model yüksek hassasiyet ve tahminlerle gerçeğin örtüşme seviyeleri arasında doğru tespiti ödüllendiren zorlu testlerde güçlü puanlar elde ediyor. Özellikle çökmüş yollar ve büyük heyelanlar gibi daha belirgin örüntülerde etkili olduğu görülürken, düzensiz kaya düşmeleri ve arka plana karışan ağaç gövdeleri hâlâ daha zor. Görsel incelemeler, geliştirilmiş ağın gerçek tehlikelerin konturlarına ve dokularına daha sıkı odaklandığını ve temel modele kıyasla daha az yanlış alarm ile küçük hedeflerin kaçırılmasını azalttığını gösteriyor.
Sınırlamalar ve sonraki adımlar
Bu gelişmelere rağmen yazarlar birkaç açık problem tanımlıyor. Mevcut sistem, örneğin kayalar ve gölgelerin buluştuğu ya da yol işaretleri ile taş yığınlarının suyla benzer görünüm gösterdiği karışık sınır noktalarında son derece küçük nesneler ve kafa karıştırıcı sınırlarla hâlâ zorlanıyor. Ayrıca bir tünel ağzının gerçekten bir çöküşe işaret edip etmediği gibi daha geniş sahne bağlamına sınırlı dikkat gösteriyor. Veri kümesi tek bir bölgeden geldiği için çok farklı iklim ve peyzajlarda performans belirsiz ve model henüz hız, güç kullanımı ile titreşim ve toz altındaki güvenilirlik gibi faktörlerin önemli olduğu gerçek hareketli bir robot üzerinde test edilmedi.
Gelecekteki kurtarmalar için ne anlama geliyor
Genel olarak çalışma, kurtarma robotlarının ağır bilgisayarlara ihtiyaç duymadan tehlikeli arazi özelliklerini daha iyi seçmelerine yardımcı olan kompakt bir görme aracı sunuyor. Sahnenin çok ölçekli görünümlerini verimli bir dikkat stratejisiyle birleştirerek DSSKA-YOLOv8n modeli büyük algılayıcıların doğruluğuna yaklaşırken küçük, enerji sınırlı cihazlar için uygun kalıyor. Daha geniş eğitim verileri, sahne bağlamının eklenmesi ve robot platformlarında gerçek dünya testleri ile bu tür sistemler, bir felaketin kritik saatlerinde kurtarma ekiplerine dengesiz yamaçlar ve hasarlı yollar hakkında daha hızlı ve daha güvenli içgörüler sağlayabilir.
Atıf: Ren, K., Xiao, X., Ma, J. et al. A lightweight and cross-scale attention network for geological hazard detection in rescue robotics. Sci Rep 16, 14916 (2026). https://doi.org/10.1038/s41598-026-45112-0
Anahtar kelimeler: jeolojik tehlikeler, kurtarma robotları, nesne tespiti, dikkat ağları, heyelan izleme