Clear Sky Science · fr
Un réseau d’attention léger et multi-échelle pour la détection des risques géologiques en robotique de secours
Des robots plus intelligents pour des terrains dangereux
Lorsque des séismes, de fortes pluies ou des travaux routiers provoquent des chutes de pierres et des glissements de terrain, il est souvent trop risqué pour des personnes d’inspecter les pentes et routes endommagées. Cette étude montre comment un nouveau système de vision « léger » peut aider de petits robots de secours à repérer rapidement des obstacles dangereux et des effondrements du sol dans de telles scènes chaotiques, même lorsque les robots ne disposent que d’une puissance de calcul embarquée limitée.
Pourquoi repérer les dangers est si difficile
Les risques géologiques dans le monde réel prennent de nombreuses formes et tailles : un bloc isolé, le bord d’une route effondré, une pente qui cède ou un arbre couché sur une voie. Leurs couleurs et textures se confondent souvent avec le terrain environnant, et le mauvais temps, la poussière et la végétation encombrent encore davantage la vue. Les robots de secours doivent fonctionner avec des ordinateurs et des batteries compacts, ils ne peuvent donc pas exécuter des modèles d’IA lourds et gourmands en énergie. Les systèmes de détection existants manquent soit de repérer de petits objets ou des cibles ambiguës, soit sont trop lourds pour fonctionner efficacement sur un robot sur le terrain.

Une nouvelle façon de concentrer la vision du robot
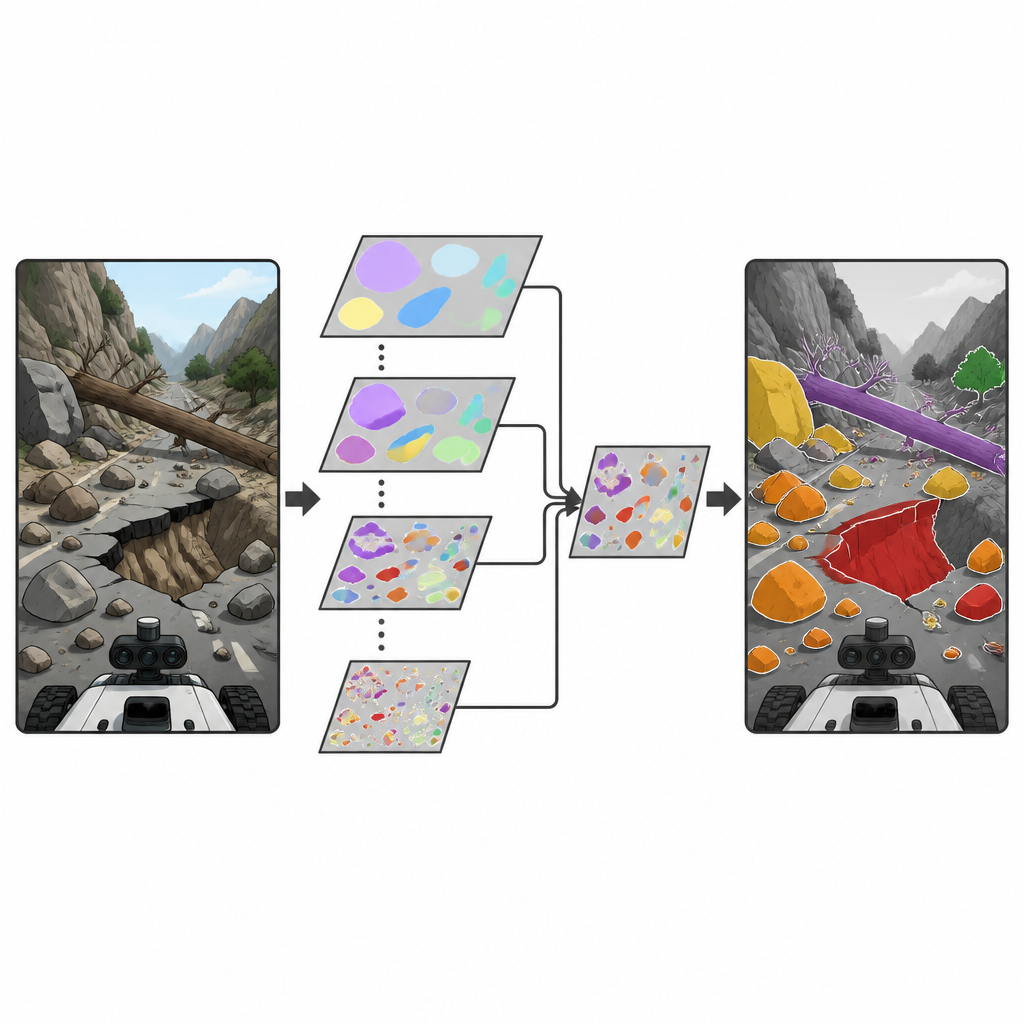
Les chercheurs s’appuient sur une famille populaire de détecteurs d’objets temps réel connue sous le nom de YOLO, largement utilisée pour repérer des objets dans des images et des vidéos. Ils introduisent un nouveau bloc appelé Depthwise Separable Selective Kernel Attention (DSSKA), puis l’intègrent dans un réseau compact YOLOv8n pour créer le modèle DSSKA-YOLOv8n. Concrètement, ce module permet au réseau d’examiner une même scène à travers plusieurs « fenêtres » de tailles différentes, puis de décider automatiquement quelle taille de fenêtre est la plus pertinente en chaque point de l’image. En utilisant une forme de calcul économe, il maintient le nombre de paramètres entraînables faible tout en affinant la capacité du modèle à détecter à la fois de petits rochers et des effondrements de grande envergure.
Entraînement sur des scènes de montagne réelles
Pour tester leur approche, l’équipe a constitué une collection d’images personnalisée issue de routes de montagne sujettes aux risques dans la province du Sichuan, en Chine. Le jeu de données contient quatre types principaux de dangers : chutes de pierres, arbres tombés, glissements de terrain et affaissements de route. Ils ont agrandi et équilibré cette collection par un traitement d’images soigné, comme la rotation des vues, la modification de l’éclairage et la simulation de flou ou d’obstructions partielles, afin d’imiter le mauvais temps et les scènes encombrées. Le modèle a ensuite été entraîné et évalué dans des conditions contrôlées, en utilisant des mesures standard de la fréquence de détection correcte des dangers et de la précision de leur délimitation.
Performances du nouveau modèle
Par rapport au réseau YOLOv8n d’origine, DSSKA-YOLOv8n améliore la qualité globale de détection tout en n’augmentant la taille du modèle que de façon marginale. Il surpasse également une autre version qui utilise un module d’attention plus traditionnel, mais avec environ 61 % de paramètres en moins. Sur les quatre types de danger, le nouveau modèle atteint une haute précision et de bons scores sur des tests exigeants qui récompensent une détection précise à de nombreux niveaux de recouvrement entre prédictions et vérité terrain. Il s’avère particulièrement efficace pour des motifs plus nets comme des routes effondrées et de grands glissements, bien que les chutes de pierres très irrégulières et les troncs d’arbres se fondant dans l’arrière-plan restent plus difficiles. Des inspections visuelles montrent que le réseau amélioré se concentre plus étroitement sur les contours et textures des vrais dangers et génère moins de fausses alertes et de petites cibles manquées que la référence.
Limites et prochaines étapes
Malgré ces progrès, les auteurs identifient plusieurs problèmes ouverts. Le système actuel peine encore avec des objets extrêmement petits et des frontières confuses, par exemple là où rochers et ombres se rejoignent, ou là où des marquages routiers et des eaux d’inondation ressemblent à des amas de pierres. Il prête aussi une attention limitée à la scène dans son ensemble, par exemple pour savoir si l’ouverture d’un tunnel signale vraiment un effondrement. Le jeu de données provient d’une seule région, si bien que les performances dans des climats et paysages très différents restent incertaines, et le modèle n’a pas encore été testé sur un robot en mouvement, où la vitesse, la consommation d’énergie et la fiabilité sous vibration et poussière sont cruciales.
Ce que cela signifie pour les secours futurs
Globalement, l’étude présente un outil de vision compact qui aide les robots de secours à mieux repérer les éléments de terrain dangereux sans nécessiter d’ordinateurs lourds. En combinant des vues multi-échelles de la scène avec une stratégie d’attention efficace, le modèle DSSKA-YOLOv8n se rapproche de la précision des grands détecteurs tout en restant adapté à de petites machines à ressources limitées. Avec des données d’entraînement plus variées, une meilleure prise en compte du contexte de la scène et des essais en conditions réelles sur des plateformes robotiques, de tels systèmes pourraient un jour fournir aux intervenants des informations plus rapides et plus sûres sur des pentes instables et des routes endommagées dans les heures cruciales suivant une catastrophe.
Citation: Ren, K., Xiao, X., Ma, J. et al. A lightweight and cross-scale attention network for geological hazard detection in rescue robotics. Sci Rep 16, 14916 (2026). https://doi.org/10.1038/s41598-026-45112-0
Mots-clés: risques géologiques, robots de secours, détection d’objets, réseaux d’attention, surveillance des glissements de terrain