Clear Sky Science · zh
基于平面约束 RRT* 算法的机械臂路径规划
机器人在狭窄空间中寻找出路
工厂机器人常与笨重设备、车身、飞机面板及其他障碍物共享狭窄工作区。要完成有用工作,机械臂必须将末端工具从一点移动到另一点而不碰撞任何物体,同时保持运动短促、平滑且可靠。本研究提出了一种新的规划方法,帮助机器人手臂在拥挤的三维环境中描绘更清晰、更安全的路径。
为何路径规划很重要
现代制造依赖机器人手臂来测量和检测诸如汽车外壳、船体和飞机蒙皮等大型复杂零件。在许多任务中,工作区的布局在每次任务之间保持不变,但机械臂必须重复相同的动作。在这种情形下,发现一条优秀的无碰撞路径远比迅速找到一条勉强可行的路线更有价值。更短、更平滑的路径可节省能量、减少关节磨损,并使检验系统在长时间运行中更快且更稳定。
将运动引导到平面的基本思路
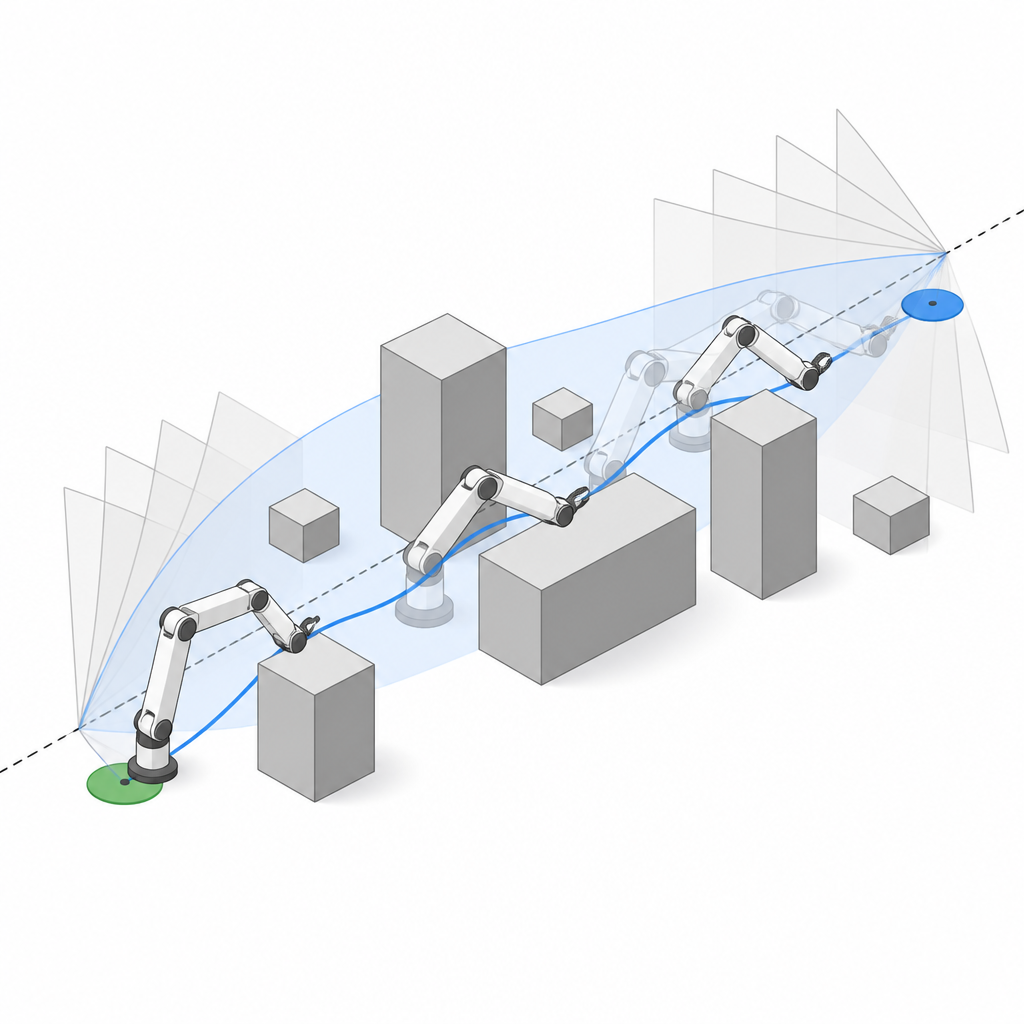
作者在一种流行的采样方法——快速扩展随机树(RRT)基础上改进,该方法通常在三维空间中散布试探点,直到偶然找到起点和目标之间的路径。他们的关键改进是将这些试探点限制在一张精心选择的平面上,该平面穿过机器人的起点和终点。与其让搜索在各个方向盲目扩展,他们将这张平面像一片纸一样绕起终点连线旋转,检查许多等间隔的角度。在每个平面上,他们规划一条绕开已知障碍的路径,并用路径长度、规划时间和路径弯曲次数的加权组合对其打分。
该方法如何塑形并平滑路径
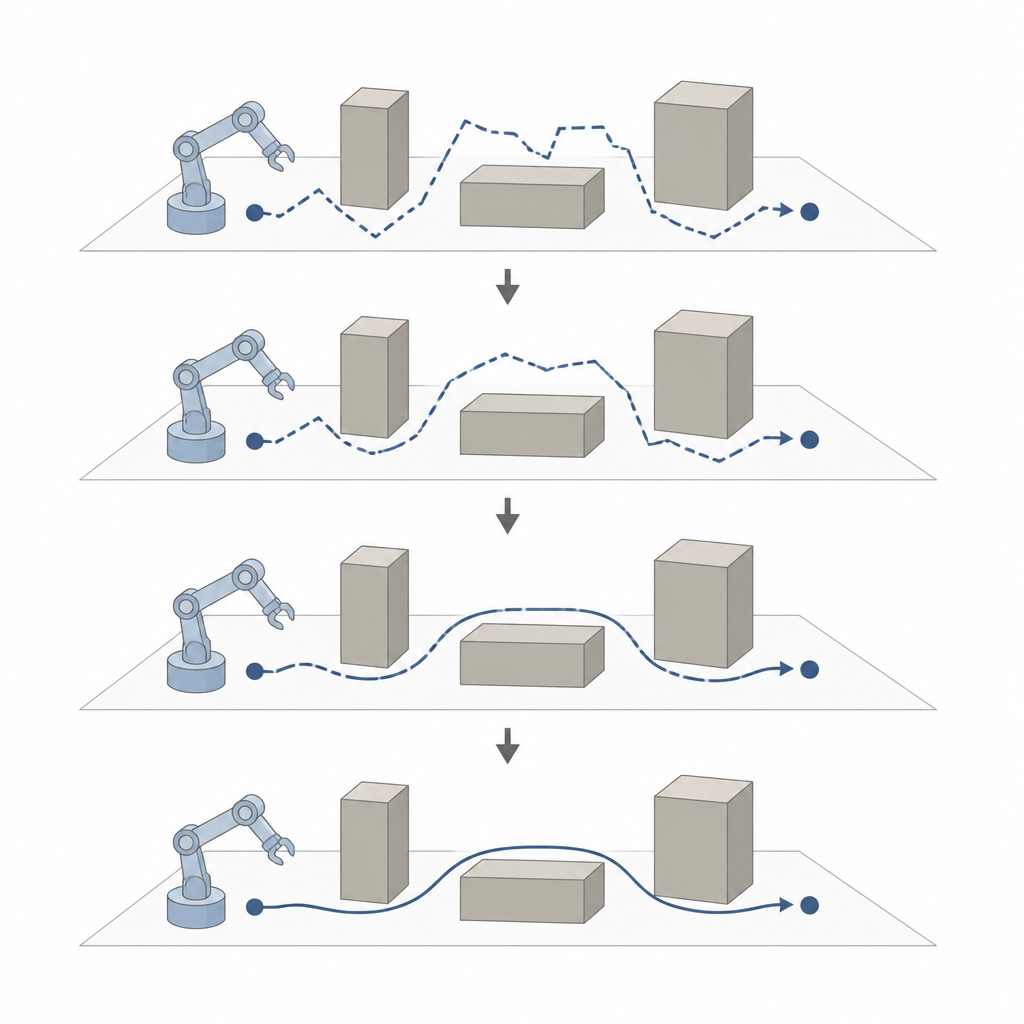
一旦从不同平面收集到候选路径,该方法选择总体得分最低的一条并对其进行细化。额外步骤会重新分配路径点之间的连接并剪除绕行,使可能运动的树状结构逐步收敛到更短的线路上。为了避免会迫使机器人关节突停或抖动的尖角,作者随后用四次多项式拟合所选路线,得到一条平滑曲线。他们还会在拟合前将任何过于接近障碍的点做微调,并重新计算缺失的深度值,以确保整条路径仍位于所选平面上。
在拥挤的虚拟与真实环境中的测试
研究团队在若干模拟障碍场以及由激光系统跟踪的六关节测量机器人上测试了他们的平面约束 RRT* 方法。他们将其与原始 RRT 方法、改进的 RRT* 版本以及一种流行的基于学习的方法 Q 学习进行了比较。在不同的障碍布局下,他们的方法一贯产生更短且使用较少中间点的路径,同时运行间的变异也更小。在一组试验中,平均路径长度相比经典 RRT 降低了超过三分之一,相比 Q 学习下降超过四成,路径点数量约减少一半。
何时平面捷径有效,何时无效
将运动引导到平面的想法并不能解决所有导航问题。像管状通道或非常密集的障碍簇可能迫使机器人以单一平面无法覆盖的方式穿行。为预见此类情况,作者加入了一项快速检查,检测起点和终点附近的即时环境。如果在某一定半径内这些位置被障碍物紧密包围,该方法会将场景标记为不太可能出现干净的平面解,从而建议使用更通用的规划器。
这对真实机械臂意味着什么
对于许多布局固定的检测和测量任务,这种平面引导策略提供了一种实用方法:用一定的离线计算换取日常运行中的长期收益。通过将搜索引导到智能旋转的平面上并对路径进行平滑处理,该方法使机器人手臂的运动更像稳定的人手而非抖动的机器。结果是路径更短、更可重复且对硬件更友好,从而使精确的自动化测量更安全、更高效。
引用: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
关键词: 机器人手臂路径规划, 避碰, RRT 星算法, 工业检验, 机器人运动平滑