Clear Sky Science · pl
Planowanie ścieżki dla manipulatorów oparte na algorytmie RRT* z ograniczeniem do płaszczyzny
Roboty znajdujące drogę w ciasnych przestrzeniach
Roboty fabryczne często dzielą ciasne przestrzenie robocze z masywnymi maszynami, karoseriami samochodów, panelami lotniczymi i innymi przeszkodami. Aby wykonać użyteczną pracę, ramię robota musi przemieścić narzędzie z jednego punktu do drugiego, nie uderzając w nic, a jednocześnie utrzymując ruch krótki, płynny i niezawodny. W tym badaniu przedstawiono nową metodę planowania, która pomaga ramionom robotów podążać po czyściejszych, bezpieczniejszych ścieżkach w zatłoczonych środowiskach trójwymiarowych.
Dlaczego planowanie ścieżek ma znaczenie
Współczesna produkcja polega na ramionach robotycznych do pomiarów i inspekcji dużych, złożonych części takich jak nadwozia samochodów, kadłuby statków czy poszycia samolotów. W wielu z tych zadań układ przestrzeni roboczej pozostaje taki sam z zadania na zadanie, ale ramię musi powtarzać ten sam ruch wielokrotnie. W takim kontekście znacznie cenniejsze jest znalezienie jednej doskonałej ścieżki wolnej od kolizji niż szybkie znalezienie jedynie akceptowalnej trasy. Krótsza, płynniejsza ścieżka oszczędza energię, zmniejsza zużycie przegubów i pozwala systemowi inspekcyjnemu pracować szybciej i bardziej konsekwentnie przez dłuższy czas.
Podstawowy pomysł kierowania ruchu na płaszczyznę
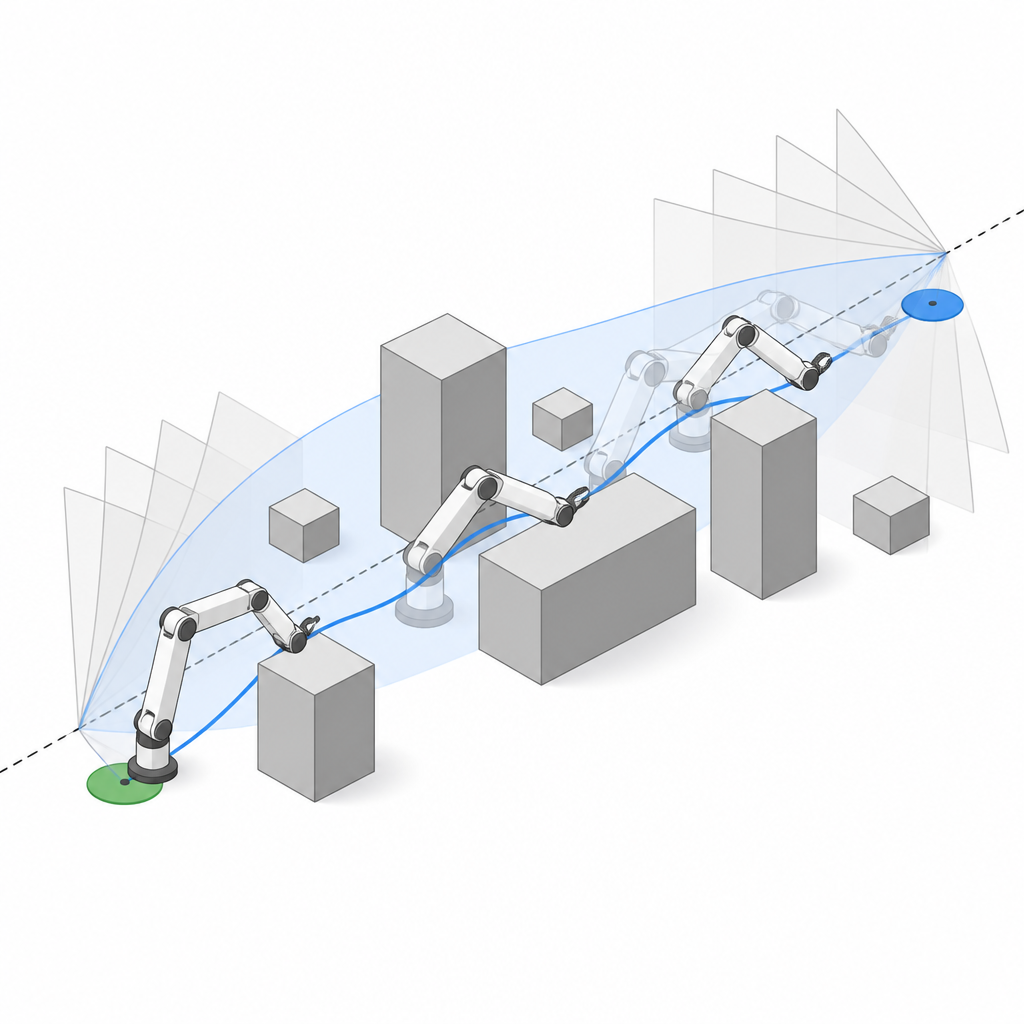
Autorzy korzystają z popularnego podejścia próbkowania zwanego szybko eksplorującymi drzewami losowymi (rapidly exploring random trees), które zwykle rozrzuca punkty próbne po całej przestrzeni trójwymiarowej, aż natrafi na trasę między punktem startu a celem. Ich kluczowy pomysł polega na ograniczeniu tych punktów próbnych do starannie dobranej płaszczyzny przechodzącej przez pozycje startu i celu robota. Zamiast pozwolić wyszukiwaniu błąkać się we wszystkich kierunkach, obracają tę płaszczyznę jak arkusz wokół prostej łączącej oba punkty, sprawdzając wiele równomiernie rozmieszczonych kątów. Na każdej płaszczyźnie planują trasę omijającą znane przeszkody, a następnie oceniają ją za pomocą ważonej mieszanki długości ścieżki, czasu planowania i liczby załamań trasy.
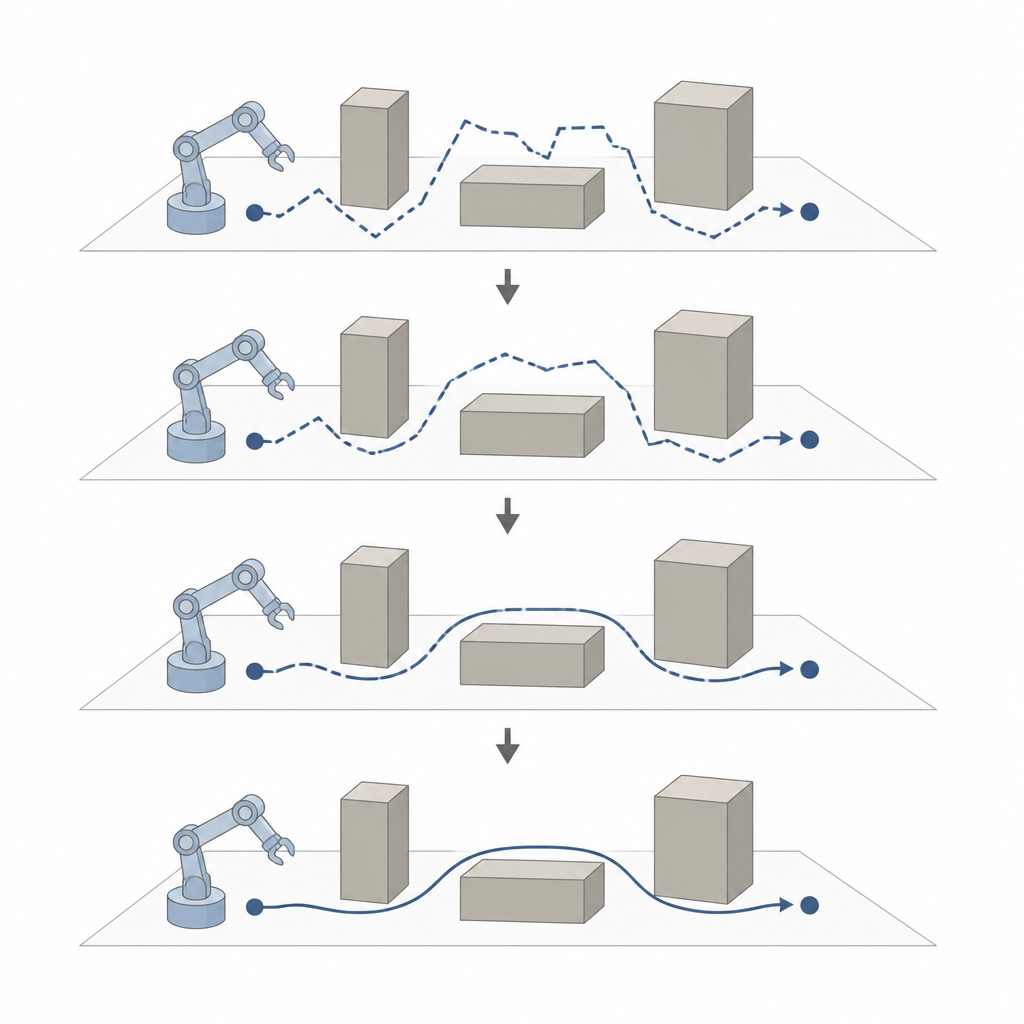
Jak metoda kształtuje i wygładza ścieżki
Gdy z różnych płaszczyzn zbierane są ścieżki kandydujące, metoda wybiera tę o najniższej łącznej ocenie i dopracowuje ją. Dodatkowe kroki przydzielają na nowo powiązania między punktami orientacyjnymi i przycinają objazdy, tak aby drzewo możliwych ruchów stopniowo zwijało się do krótszej linii. Aby uniknąć ostrych narożników, które zmuszałyby przeguby robota do szarpnięć lub zatrzymań, autorzy dopasowują wybraną trasę gładką krzywą opisaną wielomianem czwartego stopnia. Przesuwają też każde punkt, który przechodzi zbyt blisko przeszkody przed dopasowaniem, i ponownie obliczają brakujące wartości głębokości, tak by cała ścieżka nadal leżała na wybranej płaszczyźnie.
Testy w zatłoczonych światach wirtualnych i rzeczywistych
Zespół testuje swoją metodę RRT* z ograniczeniem do płaszczyzny w kilku symulowanych polach przeszkód oraz w eksperymentach z sześcioprzegubowym robotem pomiarowym śledzonym przez system laserowy. Porównują ją z oryginalną metodą RRT, ulepszoną wersją RRT* oraz popularnym podejściem uczącym się zwanym Q learning. W różnych układach przeszkód ich podejście konsekwentnie generuje trasy, które są krótsze i używają mniejszej liczby punktów pośrednich, a także wykazują mniejsze zróżnicowanie między uruchomieniami. W jednym zestawie prób średnia długość ścieżki spada o ponad jedną trzecią w porównaniu z klasycznym RRT i o ponad czterdzieści procent w porównaniu z Q learning, a liczba punktów orientacyjnych jest zredukowana w przybliżeniu o połowę.
Kiedy skrót przez płaszczyznę zadziała, a kiedy nie
Pomysł prowadzenia ruchu na płaszczyźnie nie rozwiąże każdego problemu nawigacyjnego. Przejścia przypominające rury lub bardzo gęste skupiska przeszkód mogą zmusić robota do manewrów, których nie uchwyci pojedynczy płaski arkusz. Aby przewidzieć takie przypadki, autorzy dodają szybkie sprawdzenie, które analizuje bezpośrednie otoczenie punktów startu i celu. Jeśli przeszkody ciasno otaczają te lokalizacje w określonym promieniu, metoda oznacza scenę jako mało prawdopodobną do uzyskania czystego rozwiązania płaszczyznowego, sugerując, że potrzebny jest bardziej ogólny planista.
Co to oznacza dla rzeczywistych ramion robotów
Dla wielu zadań inspekcyjnych i pomiarowych, w których układ jest stały, ta strategia prowadzona po płaszczyźnie oferuje praktyczny sposób wymiany nieco większego nakładu obliczeniowego offline na trwałe korzyści w codziennej pracy. Kierując wyszukiwanie na inteligentnie obróconą płaszczyznę, a następnie wygładzając trasę, metoda pomaga ramionom robotów poruszać się bardziej jak spokojna ludzka ręka niż jak trzęsąca się maszyna. Efektem jest ścieżka krótsza, bardziej powtarzalna i mniej obciążająca dla sprzętu, co sprawia, że precyzyjne pomiary zautomatyzowane są bezpieczniejsze i bardziej efektywne.
Cytowanie: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Słowa kluczowe: planowanie ścieżki ramienia robota, unikanie kolizji, algorytm RRT star, inspekcja przemysłowa, wygładzanie ruchu robota