Clear Sky Science · pt
Planejamento de trajeto para manipuladores baseado no algoritmo RRT* com restrição planar
Robôs encontrando seu caminho em espaços apertados
Robôs de fábrica frequentemente compartilham espaços de trabalho estreitos com máquinas volumosas, carrocerias de automóveis, painéis de aeronaves e outros obstáculos. Para realizar tarefas úteis, um braço robótico precisa mover sua ferramenta de um ponto a outro sem colidir com nada, mantendo o movimento curto, suave e confiável. Este estudo introduz um novo método de planejamento que ajuda braços robóticos a traçar trajetórias mais limpas e seguras em ambientes tridimensionais congestionados.
Por que o planejamento de trajetos importa
A fabricação moderna depende de braços robóticos para medir e inspecionar peças grandes e complexas, como carrocerias de automóveis, cascos de navios e superfícies de aeronaves. Em muitos desses trabalhos, a disposição do espaço de trabalho permanece a mesma de uma tarefa para outra, mas o braço precisa repetir o mesmo movimento várias vezes. Nesse cenário, é muito mais valioso descobrir um excelente trajeto livre de colisões do que encontrar uma rota apenas aceitável muito rapidamente. Um trajeto mais curto e suave economiza energia, reduz o desgaste nas juntas e permite que o sistema de inspeção opere mais rápido e de forma mais consistente ao longo do tempo.
A ideia básica de guiar o movimento por um plano
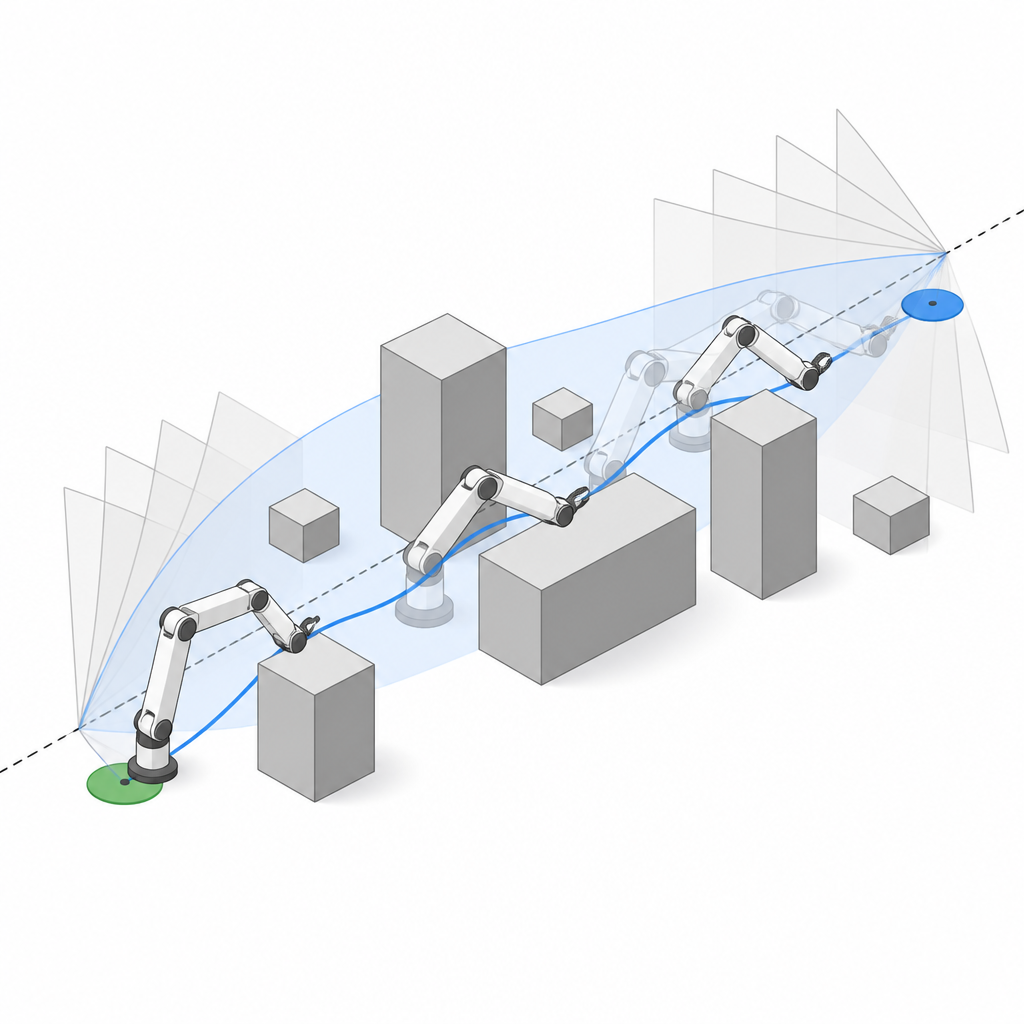
Os autores se baseiam em uma abordagem de amostragem popular chamada árvores aleatórias de exploração rápida (rapidly exploring random trees), que normalmente espalha pontos de teste por todo o espaço tridimensional até encontrar uma rota entre início e destino. A diferença-chave deles é confinar esses pontos de teste a um plano cuidadosamente escolhido que passe pelas posições inicial e final do robô. Em vez de deixar a busca vagar cegamente em todas as direções, eles rotacionam esse plano como uma folha ao redor da linha reta entre os dois pontos, verificando muitos ângulos igualmente espaçados. Em cada plano, planejam um caminho que contorna os obstáculos conhecidos e então o pontuam usando uma mistura ponderada de comprimento do trajeto, tempo de planejamento e número de curvas na rota.
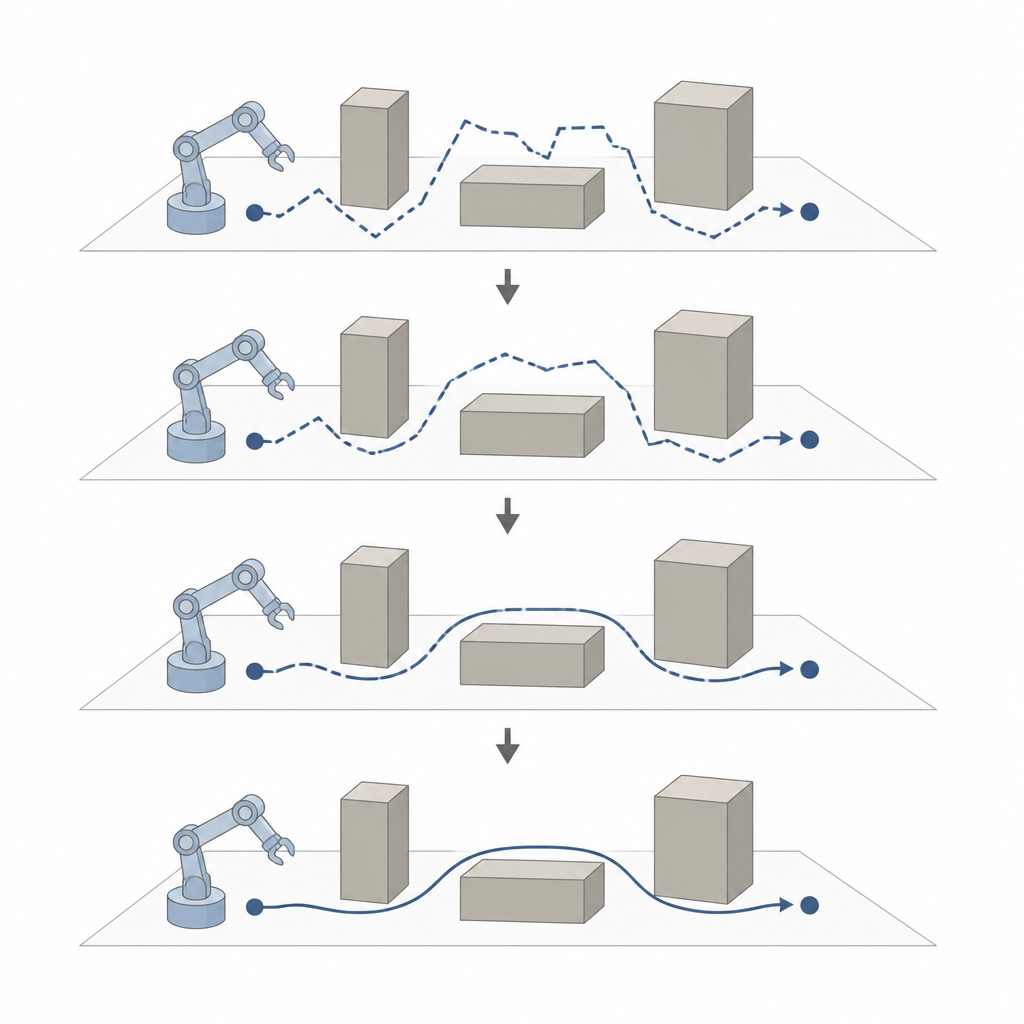
Como o método molda e suaviza trajetórias
Uma vez coletadas as trajetórias candidatas dos diferentes planos, o método seleciona aquela com a menor pontuação geral e a refina. Etapas extras reatribuem as ligações entre pontos de passagem e podam desvios, de modo que a árvore de movimentos possíveis gradualmente colapse para uma linha mais curta. Para evitar cantos agudos que forçariam as juntas do robô a solavancos ou paradas, os autores então ajustam a rota escolhida com uma curva suave descrita por um polinômio de quarta ordem. Eles também deslocam qualquer ponto que passe muito perto de um obstáculo antes do ajuste e recomputam os valores de profundidade faltantes para que todo o trajeto permaneça no plano escolhido.
Testes em mundos virtuais e reais congestionados
A equipe testa seu método RRT* com restrição planar em vários campos de obstáculos simulados e em experimentos com um robô de medição de seis juntas rastreado por um sistema a laser. Eles o comparam com o método RRT original, uma versão melhorada RRT* e um método popular baseado em aprendizado chamado Q learning. Em diferentes disposições de obstáculos, sua abordagem produz consistentemente rotas mais curtas e com menos pontos intermediários, além de mostrar menos variação entre execuções. Em um conjunto de testes, o comprimento médio do trajeto diminuiu em mais de um terço em comparação com o RRT clássico e em mais de quarenta por cento em comparação com o Q learning, e o número de pontos de passagem foi reduzido aproximadamente pela metade.
Quando o atalho planar funcionará e quando não
A ideia de guiar o movimento em um plano não resolve todo problema de navegação. Passagens em forma de tubo ou aglomerações muito densas de obstáculos podem forçar o robô a ziguezaguear de maneiras que nenhuma única folha plana consegue capturar. Para antecipar tais casos, os autores adicionam uma verificação rápida que examina os arredores imediatos dos pontos inicial e final. Se obstáculos circundarem apertadamente essas localizações dentro de um certo raio, o método sinaliza a cena como improvável de admitir uma solução planar limpa, sugerindo que um planejador mais geral seja necessário.
O que isso significa para braços robóticos reais
Para muitas tarefas de inspeção e medição em que a disposição é fixa, essa estratégia guiada por plano oferece uma maneira prática de trocar um pouco de cálculo offline por ganhos duradouros na operação diária. Ao direcionar a busca para um plano inteligentemente rotacionado e depois suavizar a rota, o método ajuda braços robóticos a mover-se mais como uma mão humana estável do que como uma máquina trêmula. O resultado é um trajeto mais curto, mais repetível e mais gentil com o hardware, tornando medições automáticas precisas mais seguras e eficientes.
Citação: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Palavras-chave: planejamento de trajeto de braço robótico, evitação de colisões, algoritmo RRT estrela, inspeção industrial, suavização de movimento robótico