Clear Sky Science · fr
Planification de trajectoire pour manipulateurs basée sur l’algorithme RRT* à contrainte planaire
Des robots qui se fraient un chemin dans des espaces étroits
Les robots d’usine partagent souvent des espaces de travail exigus avec de volumineuses machines, des carrosseries automobiles, des panneaux d’aéronefs et d’autres obstacles. Pour accomplir une tâche utile, un bras robotique doit déplacer son outil d’un point à un autre sans heurter quoi que ce soit, tout en maintenant un mouvement court, fluide et fiable. Cette étude introduit une nouvelle méthode de planification qui aide les bras robotisés à tracer des trajectoires plus propres et plus sûres dans des environnements tridimensionnels encombrés.
Pourquoi la planification de trajectoire est importante
La fabrication moderne repose sur des bras robots pour mesurer et inspecter de grandes pièces complexes comme des carrosseries de voiture, des coques de navire ou des revêtements d’aéronef. Dans beaucoup de ces opérations, l’agencement de l’espace de travail reste le même d’une tâche à l’autre, mais le bras doit répéter le même mouvement encore et encore. Dans ce contexte, il vaut bien mieux découvrir une excellente trajectoire sans collision que de trouver très rapidement un chemin seulement acceptable. Une trajectoire plus courte et plus lisse économise de l’énergie, réduit l’usure des articulations et permet au système d’inspection de fonctionner plus rapidement et de façon plus constante sur de longues périodes.
L’idée de base : guider le mouvement sur un plan
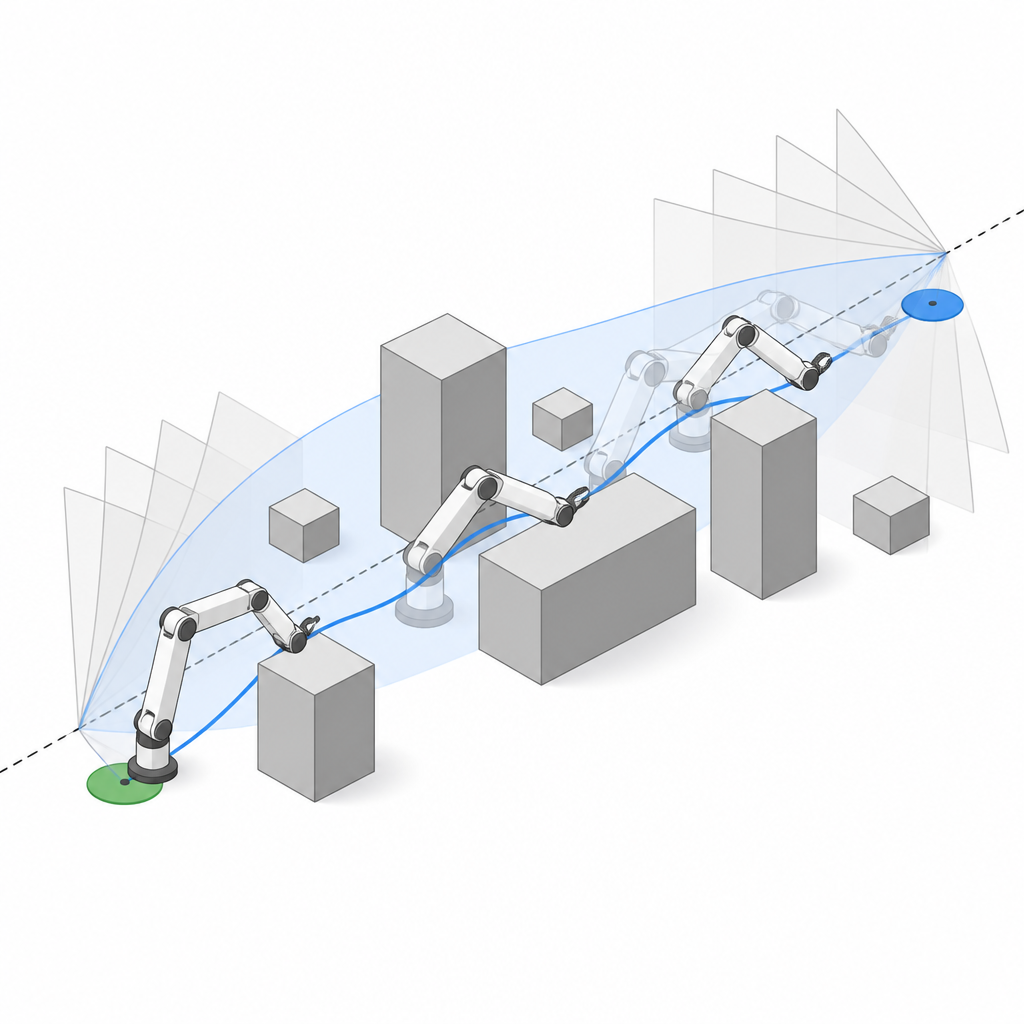
Les auteurs s’appuient sur une approche d’échantillonnage populaire appelée rapidly exploring random trees, qui disperse généralement des points d’essai dans l’espace tridimensionnel jusqu’à trouver par hasard une route entre le départ et l’arrivée. Leur astuce principale consiste à confiner ces points d’essai à un plan soigneusement choisi passant par les positions de départ et d’arrivée du robot. Plutôt que de laisser la recherche errer aveuglément dans toutes les directions, ils font pivoter ce plan comme une feuille autour de la ligne droite joignant les deux points, en testant de nombreux angles également espacés. Sur chaque plan, ils planifient un parcours qui contourne les obstacles connus, puis l’évaluent à l’aide d’un mélange pondéré de longueur de trajectoire, temps de planification et nombre de coudes dans le trajet.
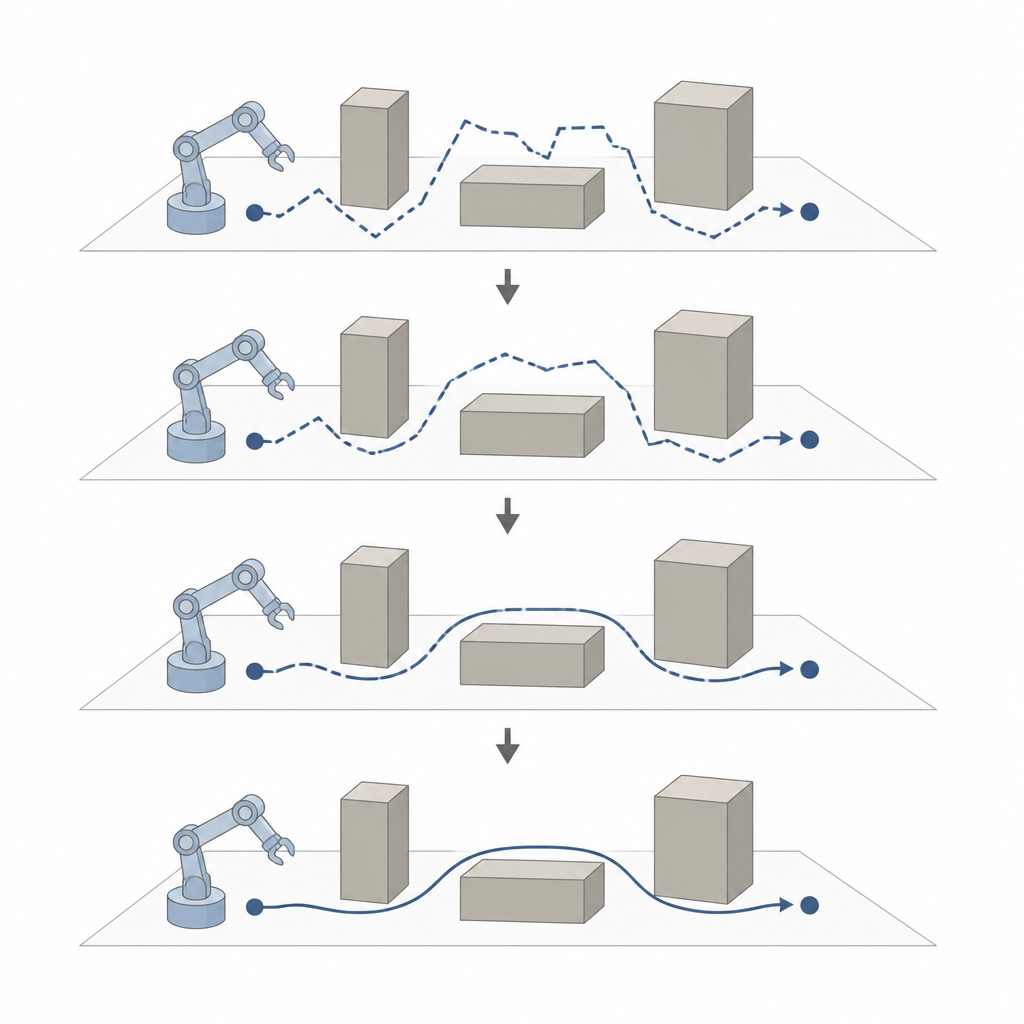
Comment la méthode façonne et lisse les trajectoires
Une fois les trajectoires candidates recueillies à partir des différents plans, la méthode sélectionne celle dont le score global est le plus bas et la raffine. Des étapes supplémentaires réaffectent les liaisons entre les points de passage et élaguent les détours, de sorte que l’arborescence des mouvements possibles se contracte progressivement en une ligne plus courte. Pour éviter les coins vifs qui forceraient les articulations du robot à donner des à-coups ou à s’arrêter, les auteurs ajustent ensuite la trajectoire choisie par une courbe lisse décrite par un polynôme de quatrième degré. Ils infléchissent également tout point passant trop près d’un obstacle avant l’ajustement, et recomputent les valeurs de profondeur manquantes afin que l’ensemble du trajet reste sur le plan choisi.
Tests dans des mondes virtuels et réels encombrés
L’équipe met à l’épreuve sa méthode RRT* à contrainte planaire dans plusieurs champs d’obstacles simulés et lors d’expériences avec un robot de mesure à six articulations suivi par un système laser. Ils la comparent à la méthode RRT originale, à une version améliorée RRT* et à une méthode d’apprentissage populaire appelée Q learning. Sur différents agencements d’obstacles, leur approche produit systématiquement des trajectoires plus courtes et utilisant moins de points intermédiaires, tout en montrant moins de variations d’une exécution à l’autre. Dans une série d’essais, la longueur moyenne des trajectoires diminue de plus d’un tiers par rapport au RRT classique et de plus de quarante pour cent par rapport au Q learning, et le nombre de points de passage est réduit d’environ moitié.
Quand le raccourci planaire marche — et quand il ne marche pas
L’idée de guider le mouvement sur un plan ne résout pas tous les problèmes de navigation. Des passages en forme de tuyau ou des amas d’obstacles très denses peuvent contraindre un robot à onduler d’une manière qu’aucune feuille plane unique ne peut capturer. Pour anticiper de tels cas, les auteurs ajoutent un contrôle rapide qui examine l’environnement immédiat des points de départ et d’arrivée. Si des obstacles encerclent étroitement ces emplacements dans un certain rayon, la méthode signale que la scène est peu susceptible d’admettre une solution planaire propre, suggérant qu’un planificateur plus général est nécessaire.
Ce que cela signifie pour les bras robotiques réels
Pour de nombreuses tâches d’inspection et de mesure où la configuration est fixe, cette stratégie guidée par un plan offre un moyen pratique d’échanger un peu de calcul hors ligne contre des gains durables en exploitation quotidienne. En orientant la recherche sur un plan intelligemment pivoté puis en lissant la trajectoire, la méthode aide les bras robotisés à se déplacer plus comme une main humaine stable que comme une machine saccadée. Le résultat est une trajectoire plus courte, plus reproductible et plus douce pour le matériel, rendant les mesures automatisées précises plus sûres et plus efficaces.
Citation: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Mots-clés: planification de trajectoire de bras robotique, évitement de collisions, algorithme RRT étoile, inspection industrielle, lissage du mouvement robotique