Clear Sky Science · it
Pianificazione del percorso per manipolatori basata sull'algoritmo RRT* con vincolo planare
I robot che si fanno strada negli spazi ristretti
I robot di fabbrica spesso condividono spazi di lavoro angusti con macchine ingombranti, scocche di automobili, pannelli aeronautici e altri ostacoli. Per svolgere compiti utili, un braccio robotico deve spostare il suo utensile da un punto a un altro senza urtare nulla, mantenendo il movimento breve, fluido e affidabile. Questo studio introduce un nuovo metodo di pianificazione che aiuta i bracci robotici a tracciare percorsi più puliti e più sicuri in ambienti tridimensionali affollati.
Perché la pianificazione del percorso è importante
La produzione moderna si affida a bracci robotici per misurare e ispezionare parti grandi e complesse come carrozzerie di auto, scafi di navi e superfici aeronautiche. In molti di questi lavori la disposizione dello spazio di lavoro rimane la stessa da un compito all'altro, ma il braccio deve ripetere lo stesso movimento più volte. In questo contesto, è molto più prezioso trovare un eccellente percorso privo di collisioni che trovare rapidamente una via appena accettabile. Un percorso più corto e più fluido risparmia energia, riduce l'usura delle giunture e permette al sistema di ispezione di funzionare più velocemente e con maggiore coerenza nel tempo.
L'idea di base: guidare il movimento su un piano
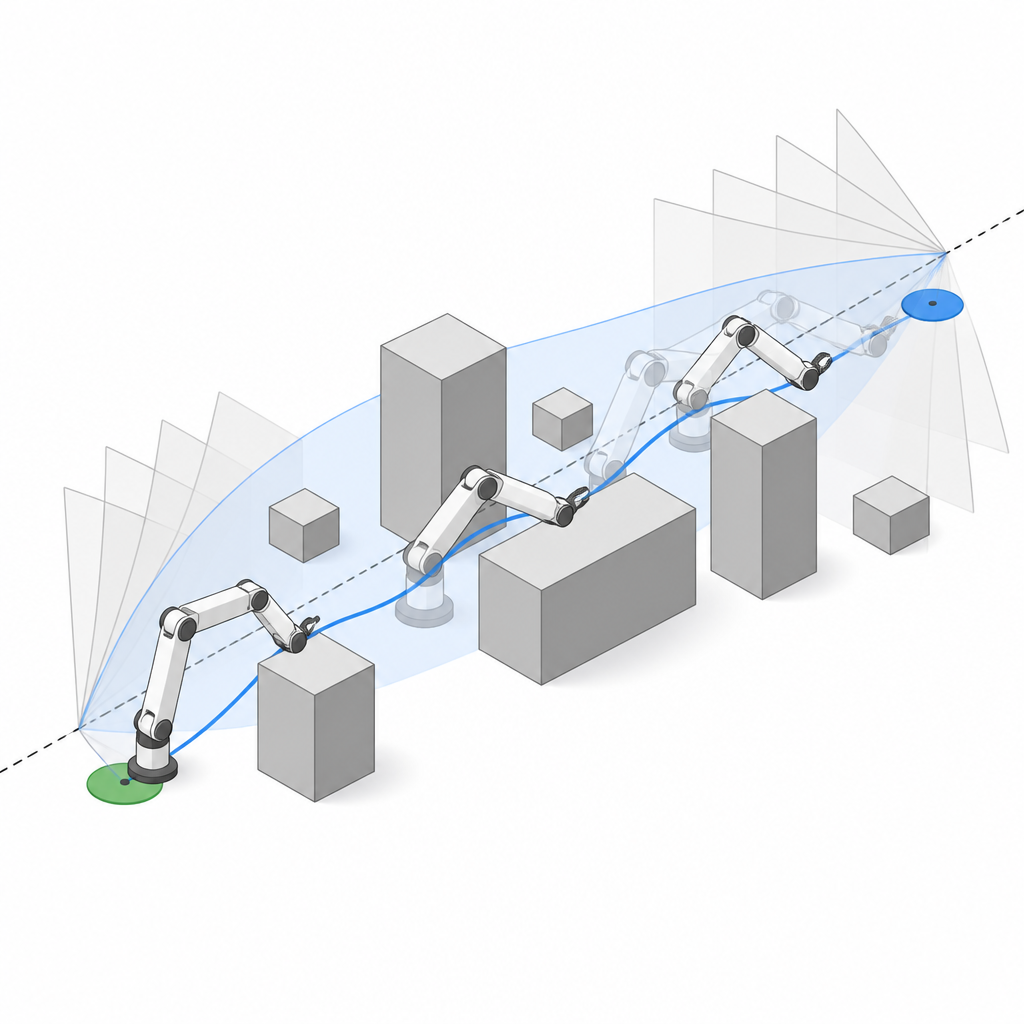
Gli autori si basano su un approccio di campionamento popolare chiamato rapidly exploring random trees, che di solito sparge punti di prova in tutto lo spazio tridimensionale finché non trova una rotta tra inizio e destinazione. La loro modifica chiave è limitare questi punti di prova a un piano scelto con cura che attraversa le posizioni di partenza e arrivo del robot. Invece di lasciare che la ricerca vaghi alla cieca in tutte le direzioni, ruotano questo piano come un foglio attorno alla retta che unisce i due punti, controllando molti angoli equispaziati. Su ogni piano progettano un percorso che evita gli ostacoli noti e poi lo valutano usando una combinazione pesata di lunghezza del percorso, tempo di pianificazione e numero di piegature nella rotta.
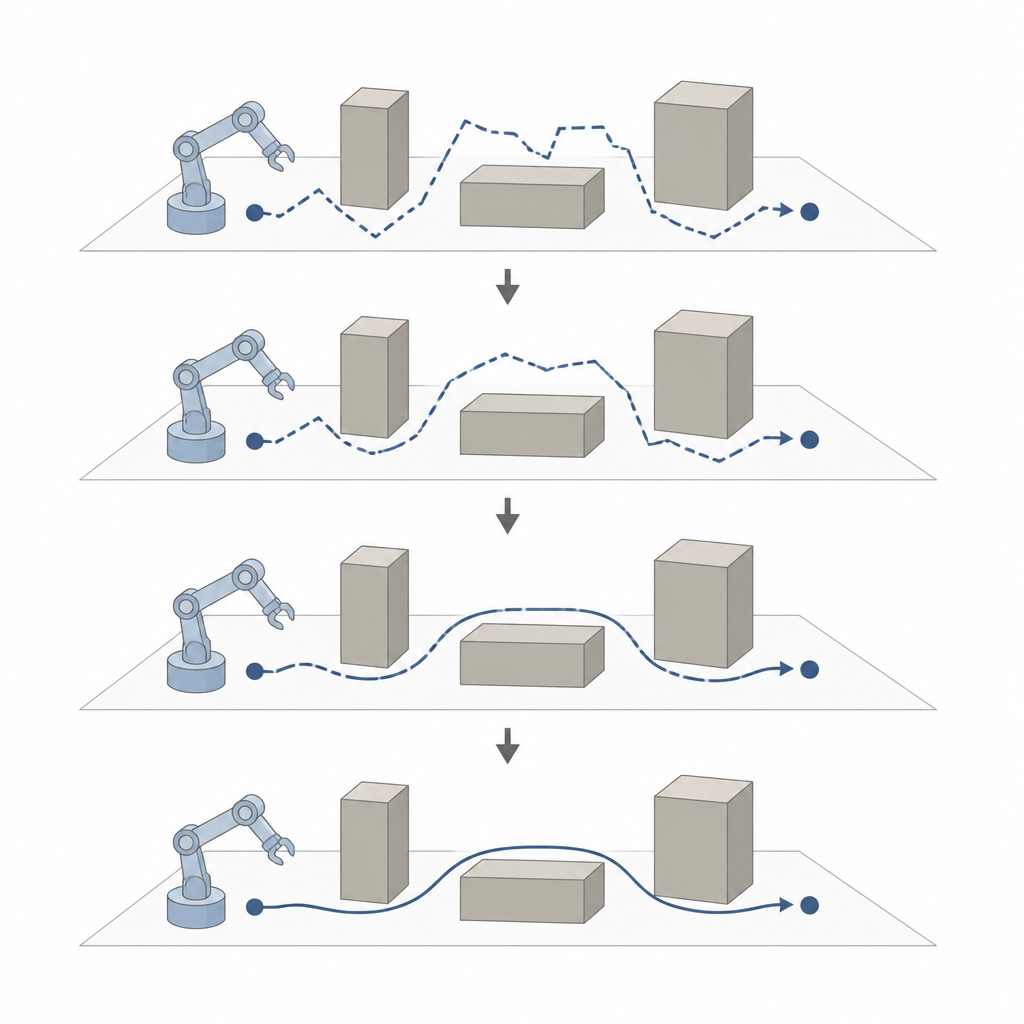
Come il metodo modella e smussa i percorsi
Una volta raccolti i percorsi candidati dai diversi piani, il metodo seleziona quello con il punteggio complessivo più basso e lo affina. Passaggi aggiuntivi riallocano i collegamenti tra i waypoint e potano le deviazioni, in modo che l'albero delle possibili traiettorie si riduca gradualmente verso una linea più corta. Per evitare angoli netti che costringerebbero le giunture del robot a scattare o fermarsi, gli autori approssimano quindi la rotta scelta con una curva liscia descritta da un polinomio di quarto grado. Inoltre spostano leggermente qualsiasi punto che passi troppo vicino a un ostacolo prima dell'applicazione della curva e ricalcolano i valori di profondità mancanti in modo che l'intero percorso rimanga sul piano scelto.
Test in mondi virtuali e reali affollati
Il team mette alla prova il loro metodo RRT* con vincolo planare in diversi campi di ostacoli simulati e in esperimenti con un robot di misura a sei giunti tracciato da un sistema laser. Lo confrontano con il metodo RRT originale, una versione migliorata RRT* e un popolare metodo basato sull'apprendimento chiamato Q learning. In differenti configurazioni di ostacoli, il loro approccio produce costantemente rotte più corte e con meno punti intermedi, mostrando anche minore variabilità tra le esecuzioni. In un insieme di prove, la lunghezza media del percorso diminuisce di oltre un terzo rispetto al RRT classico e di oltre il quaranta percento rispetto al Q learning, e il numero di waypoint si riduce circa della metà.
Quando lo stratagemma planare funziona e quando no
L'idea di guidare il movimento su un piano non può risolvere ogni problema di navigazione. Passaggi a forma di tubo o ammassi molto densi di ostacoli possono costringere un robot a svoltare in modi che nessun singolo foglio piano può catturare. Per anticipare tali casi, gli autori aggiungono un controllo rapido che esamina l'intorno immediato dei punti di partenza e arrivo. Se gli ostacoli circondano strettamente queste posizioni entro un certo raggio, il metodo segnala che la scena probabilmente non ammette una soluzione planare pulita, suggerendo che è necessario un pianificatore più generale.
Cosa significa questo per i bracci robotici reali
Per molti compiti di ispezione e misura in cui la disposizione è fissa, questa strategia guidata da un piano offre un modo pratico per scambiare un po' di calcolo offline con benefici duraturi nell'operatività quotidiana. Guidando la ricerca su un piano ruotato in modo intelligente e poi smussando la rotta, il metodo aiuta i bracci robotici a muoversi più come una mano umana ferma che come una macchina tremolante. Il risultato è un percorso più corto, più ripetibile e meno gravoso per l'hardware, rendendo le misurazioni automatiche più precise, sicure ed efficienti.
Citazione: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Parole chiave: pianificazione percorso braccio robotico, evitamento delle collisioni, algoritmo RRT star, ispezione industriale, smussamento del movimento robotico