Clear Sky Science · ar
تخطيط المسار للمعاضد اعتمادًا على خوارزمية RRT* المقيدة بالمستوى
الروبوتات تجد طريقها في المساحات الضيقة
غالبًا ما تشارك روبوتات المصانع مساحات عمل مكتظة مع آلات ضخمة، وهياكل سيارات، وكسوات طائرات، وعوائق أخرى. لكي تؤدي الروبوتات عملها المفيد، يجب على ذراع الروبوت نقل أداته من نقطة إلى أخرى دون الاصطدام بأي شيء، مع الحفاظ على الحركة قصيرة وسلسة وموثوقة. تقدم هذه الدراسة طريقة تخطيط جديدة تساعد أذرع الروبوت على تتبع مسارات أنظف وأكثر أمانًا في بيئات ثلاثية الأبعاد مزدحمة.
لماذا يهم تخطيط المسار
تعتمد التصنيع الحديث على أذرع الروبوت لقياس وفحص قطع كبيرة ومعقدة مثل هياكل السيارات، وأجناب السفن، وجلود الطائرات. في كثير من هذه المهام يبقى ترتيب مساحة العمل متكررًا من مهمة إلى أخرى، لكن يجب على الذراع تكرار نفس الحركة مرارًا وتكرارًا. في هذا السياق، من الأكثر قيمة اكتشاف مسار خالٍ من الاصطدام ممتاز واحد بدلًا من إيجاد مسار مقبول بسرعة فقط. فالمسار الأقصر والأكثر سلاسة يوفر الطاقة، ويقلل تآكل المفاصل، ويسمح لنظام الفحص بالعمل أسرع وبشكل أكثر اتساقًا على مدى فترات طويلة.
الفكرة الأساسية لتوجيه الحركة إلى مستوى
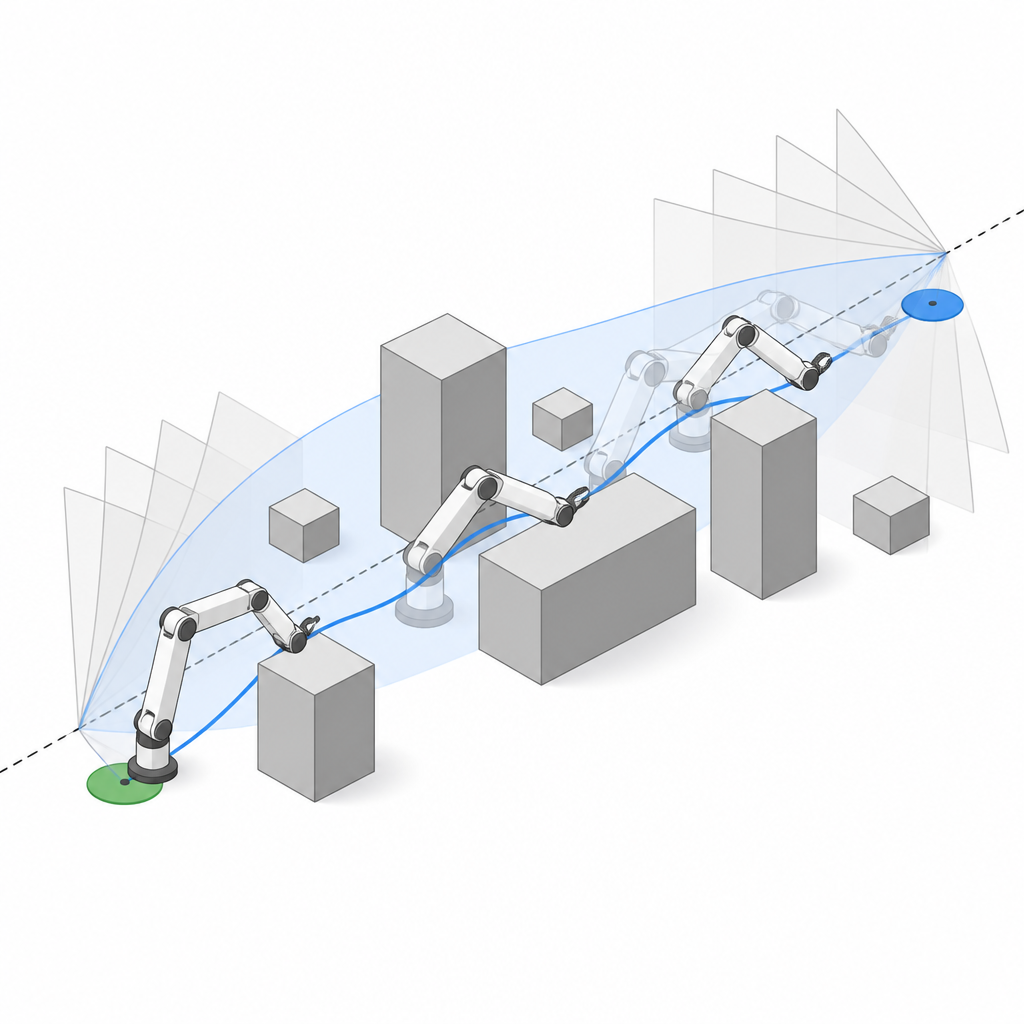
يبني المؤلفون على نهج شائع للعينة يُدعى أشجار الاستكشاف العشوائي السريع، الذي يوزع عادة نقاط تجريبية عبر الفضاء ثلاثي الأبعاد حتى يعثر على مسار بين البداية والهدف. التحوير الرئيسي لديهم هو حصر هذه النقاط التجريبية على مستوى مختار بعناية يمر عبر موقعي البداية والنهاية للروبوت. بدلًا من السماح للبحث بالتشتت في جميع الاتجاهات، يدورون هذا المستوى كصفحة حول الخط المستقيم بين النقطتين، ويفحصون العديد من الزوايا المتباعدة بالتساوي. على كل مستوى، يخططون لمسار يحيط بالعقبات المعروفة ثم يقيمونه باستخدام مزيج موزون من طول المسار، ووقت التخطيط، وعدد الانحناءات في المسار.
كيف تشكل الطريقة المسارات وتُنعّمها
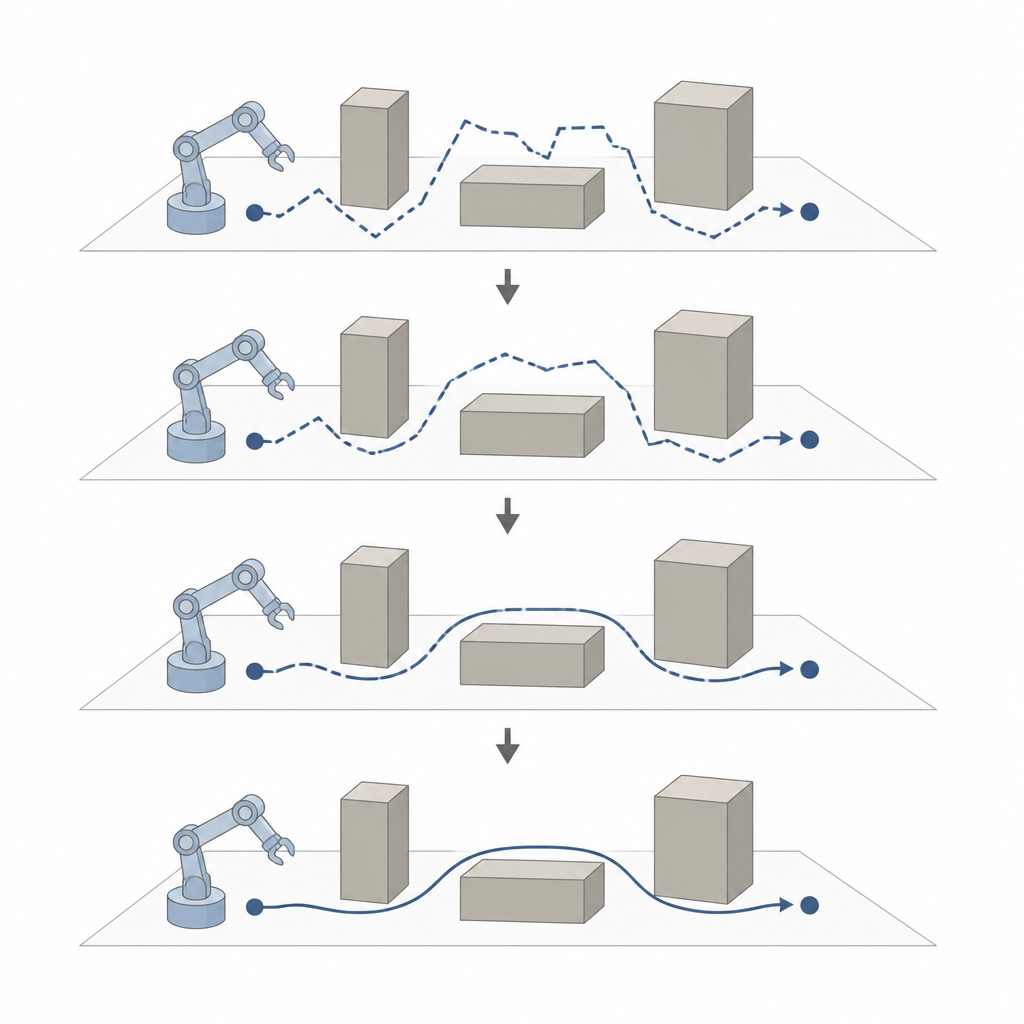
بمجرد جمع المسارات المرشحة من المستويات المختلفة، تختار الطريقة المسار ذو أدنى درجة كلية ثم تقوم بصقله. خطوات إضافية تعيد تعيين الروابط بين نقاط المسار وتقلم التحويلات المطولة، بحيث تنهار شجرة الحركات المحتملة تدريجيًا إلى خط أقصر. ولتجنب الزوايا الحادة التي قد تجبر مفاصل الروبوت على الارتجاج أو التوقف، يلائم المؤلفون المسار المختار بمنحنى أملس يوصف كثيرة حدود رابعة الدرجة. كما يقومون بدفع أي نقطة تقترب كثيرًا من عقبة قبل عملية الملاءمة، وإعادة حساب قيم العمق المفقودة حتى يظل المسار بأكمله على المستوى المختار.
الاختبار في عوالم افتراضية وحقيقية مزدحمة
يضع الفريق طريقة RRT* المقيدة بالمستوى قيد الاختبار في عدة مجالات عقبات محاكاة وفي تجارب مع روبوت قياس سداسي المفاصل يتعقبه نظام ليزري. يقارنونها مع طريقة RRT الأصلية، وإصدار RRT* المحسّن، وطريقة شائعة قائمة على التعلم تُدعى Q learning. عبر تخطيطات عقبات مختلفة، ينتج نهجهم باستمرار مسارات أقصر وتستخدم نقاطًا وسيطة أقل، مع إظهار تذبذب أقل بين التجارب. في مجموعة من التجارب، انخفض متوسط طول المسار بأكثر من الثلث مقارنةً بـ RRT الكلاسيكي وبأكثر من أربعين بالمئة مقارنةً بـ Q learning، وتم تقليص عدد نقاط الطريق تقريبًا إلى النصف.
متى تنجح الحيلة المستوية ومتى لا تنجح
فكرة توجيه الحركة على مستوى لا يمكنها حل كل مشاكل التنقل. قد تضطر الممرات الشبيهة بالأنابيب أو تجمعات العقبات الكثيفة جدًا الروبوت إلى الانسياج بطرق لا يمكن لورقة مسطحة واحدة التقاطها. للتنبؤ بمثل هذه الحالات، يضيف المؤلفون فحصًا سريعًا ينظر إلى المحيط الفوري لنقطتي البداية والنهاية. إذا أحاطت العقبات بهذه المواقع بإحكام ضمن نصف قطر معين، تَطلِع الطريقة المشهد على أنه من غير المرجح أن يقبل حلًا مسطيًا نظيفًا، مشيرةً إلى حاجة مخطط أكثر عمومية.
ما مغزى هذا لأذرع الروبوت الحقيقية
بالنسبة للعديد من مهام الفحص والقياس حيث يكون التخطيط ثابتًا، يوفر هذا الأسلوب الموجه بالمستوى وسيلة عملية للمقايضة ببعض الحسابات الأوفلاين مقابل مكاسب دائمة في التشغيل اليومي. من خلال توجيه البحث إلى مستوى مدور بذكاء ثم تنعيم المسار، تساعد الطريقة أذرع الروبوت على التحرك أكثر مثل يد إنسان ثابتة بدلًا من آلة مرتعشة. النتيجة مسار أقصر وأكثر قابلية للتكرار وألطف على العتاد، مما يجعل القياسات الآلية الدقيقة أكثر أمانًا وكفاءة.
الاستشهاد: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
الكلمات المفتاحية: تخطيط مسار ذراع الروبوت, تجنب الاصطدام, خوارزمية RRT ستار, الفحص الصناعي, تنعيم حركة الروبوت