Clear Sky Science · tr
Düzlemsel kısıtlı RRT* algoritmasına dayalı manipülatörler için yol planlaması
Sıkışık alanlarda yollarını bulan robotlar
Fabrika robotları sık sık hacimli makineler, otomobil gövdeleri, uçak panelleri ve diğer engellerle paylaşılmış dar çalışma alanlarında çalışır. Faydalı işler yapabilmek için, bir robot kolu aletini bir noktadan diğerine herhangi bir şeye çarpmadan taşırken hareketin kısa, düzgün ve güvenilir olması gerekir. Bu çalışma, dağınık üç boyutlu ortamlarda robot kollarının daha temiz, daha güvenli yollar izlemesine yardımcı olan yeni bir planlama yöntemi tanıtıyor.
Yol planlamanın önemi
Modern üretim, otomobil gövdeleri, gemi gövdeleri ve uçak kaplamaları gibi büyük, karmaşık parçaları ölçmek ve incelemek için robot kollarına dayanır. Bu işlerin çoğunda çalışma alanının düzeni görevler arasında aynı kalır, ancak kol aynı hareketi tekrar tekrar gerçekleştirmek zorundadır. Bu durumda, makul bir rotayı çok hızlı bulmaktan ziyade mükemmele yakın bir çarpışmasız yol bulmak çok daha değerlidir. Daha kısa, daha düzgün bir yol enerji tasarrufu sağlar, mafsallardaki aşınmayı azaltır ve inceleme sisteminin uzun süreler boyunca daha hızlı ve tutarlı çalışmasına olanak tanır.
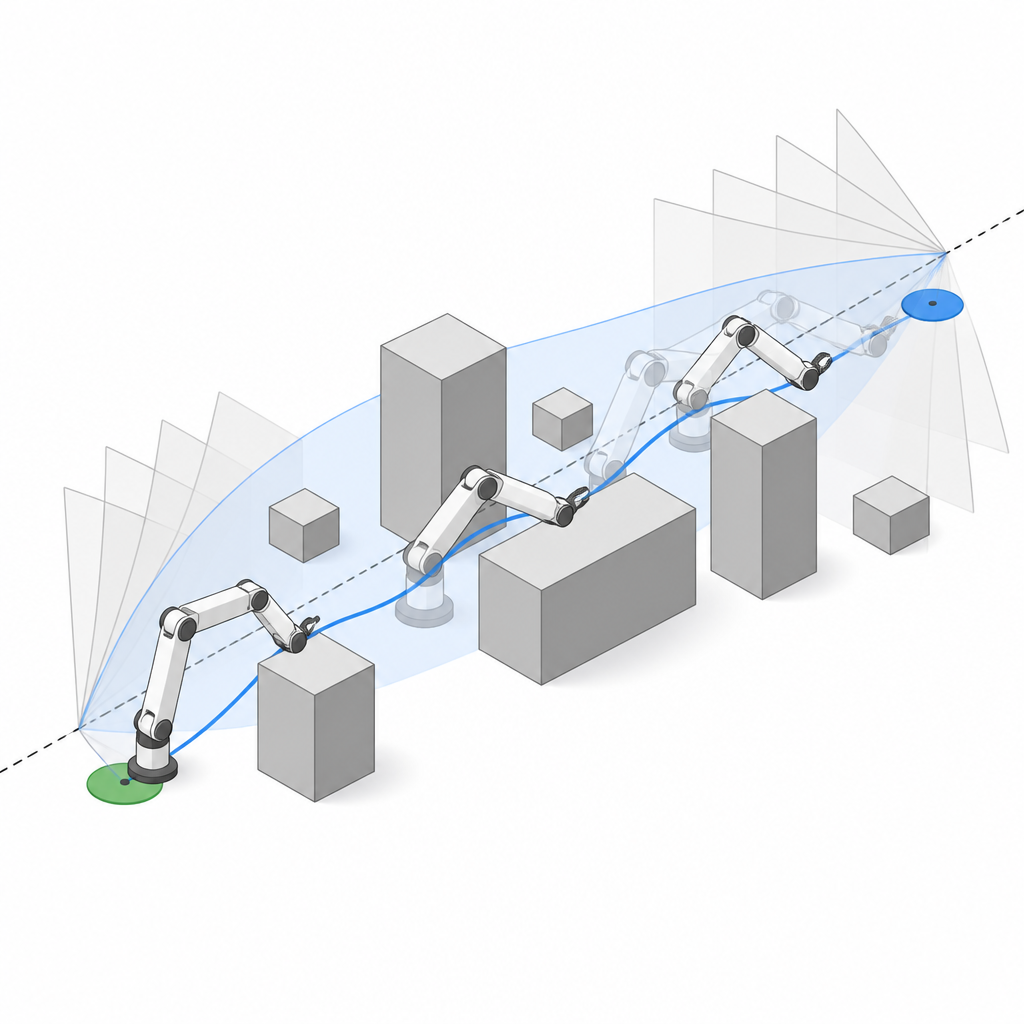
Hareketi bir düzleme yönlendirmenin temel fikri
Yazarlar, genellikle başlama ve hedef arasındaki bir rotayı bulana kadar deneme noktalarını üç boyutlu uzay boyunca serpiştiren hızla keşfeden rastgele ağaçlar olarak bilinen popüler bir örnekleme yaklaşımına dayanıyor. Ana farklılıkları, bu deneme noktalarını robotun başlangıç ve bitiş pozisyonlarından geçen dikkatle seçilmiş bir düzlemle sınırlamaktır. Aramaya her yönde körü körüne gezinme izni vermek yerine, bu düzlemi iki nokta arasındaki doğru çevresinde bir sayfa gibi döndürürler ve eşit aralıklı birçok açıyı kontrol ederler. Her düzlemde, bilinen engelleri çevreleyen bir yol planlarlar ve ardından bunu yol uzunluğu, planlama zamanı ve rotadaki kırılma sayısının ağırlıklı bir karışımıyla puanlarlar.
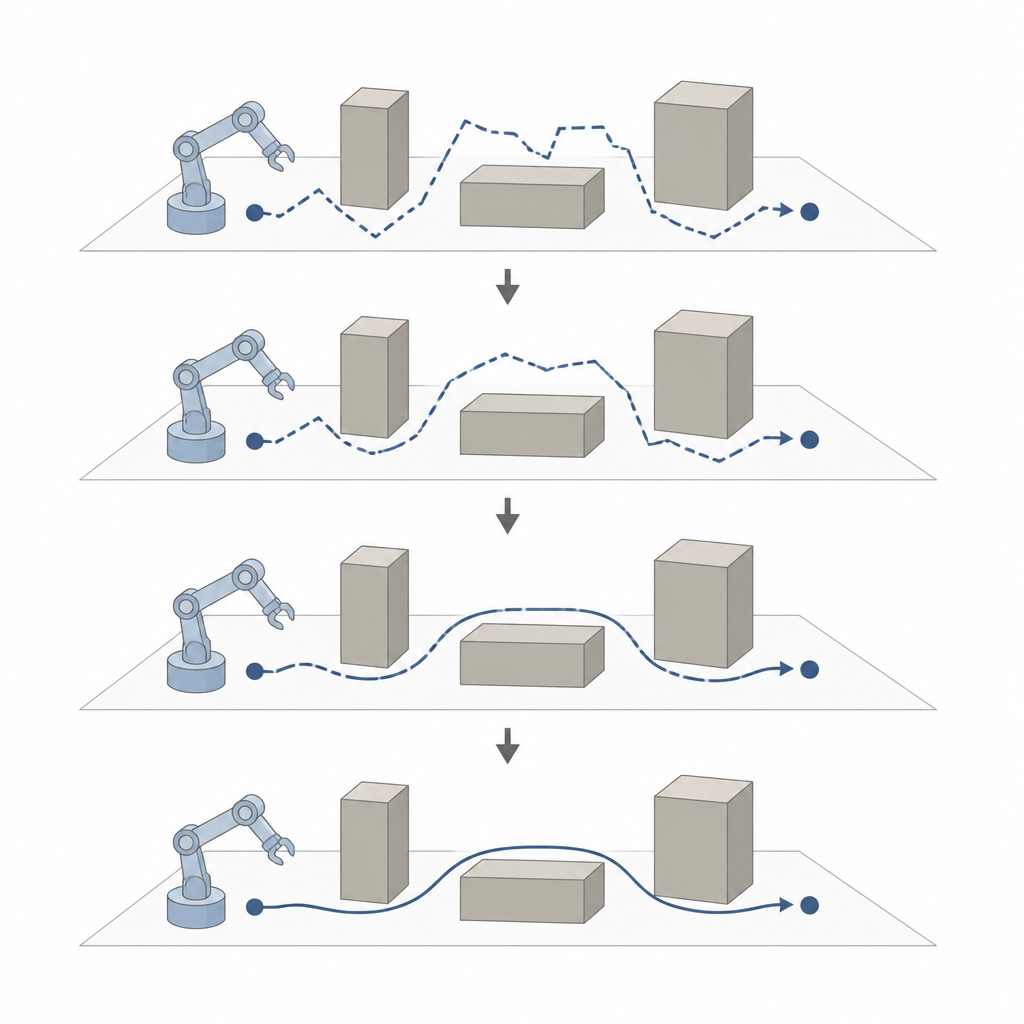
Yöntem yolları nasıl şekillendirir ve düzeltir
Farklı düzlemlerden aday yollar toplandıktan sonra yöntem en düşük toplam puana sahip olanı seçer ve onu iyileştirir. Ek adımlar ara nokta bağlantılarını yeniden atar ve dolambaçları budar, böylece olası hareket ağacı kademeli olarak daha kısa bir çizgiye çöküşür. Robot mafsallarının sarsılmasına veya durmasına yol açabilecek keskin köşelerden kaçınmak için yazarlar seçilen rotuyu dördüncü dereceden bir polinomla tanımlanan düzgün bir eğriyle uyarlar. Ayrıca herhangi bir engelin çok yakınına geçen noktaları uyarlar ve sığalanmadan önce eksik derinlik değerlerini yeniden hesaplayarak tüm yolun seçilen düzlem üzerinde kalmasını sağlarlar.
Dağınık sanal ve gerçek dünyalarda test etme
Ekip, düzlemsel kısıtlı RRT* yöntemini birkaç simüle edilmiş engel alanında ve bir lazer sistemiyle izlenen altı eklemli bir ölçüm robotuyla deneylerde test ediyor. Yöntemlerini orijinal RRT yöntemi, geliştirilmiş bir RRT* sürümü ve Q learning adı verilen popüler bir öğrenme tabanlı yöntemle karşılaştırıyorlar. Farklı engel düzenlerinde, yaklaşımları tutarlı şekilde daha kısa rotalar ve daha az ara nokta kullanımı sağlıyor ve çalıştırmalar arası değişimi de azaltıyor. Bir dizi denemede ortalama yol uzunluğu klasik RRT ile karşılaştırıldığında üçte birden fazla, Q learning ile karşılaştırıldığında ise yüzde kırktan fazla azalırken, ara nokta sayısı yaklaşık olarak yarı yarıya düşüyor.
Düzlemsel kestirme ne zaman işe yarar, ne zaman yaramaz
Hareketi bir düzlem üzerinde yönlendirme fikri her navigasyon problemini çözemeyebilir. Boru benzeri geçitler veya çok yoğun engel kümeleri, bir robotu tek bir düz sayfanın yakalayamayacağı şekilde dolanmaya zorlayabilir. Bu tür durumları öngörmek için yazarlar başlangıç ve bitiş noktalarının hemen çevresine hızlı bir kontrol ekler. Eğer engeller belirli bir yarıçap içinde bu konumları sıkı şekilde çepeçevre sarıyorsa, yöntem sahneyi temiz bir düzlemsel çözümü kabul etmeyecek şekilde işaretler ve daha genel bir planlayıcının gerektiğini önerir.
Bu gerçek robot kolları için ne anlama geliyor
Düzenin sabit olduğu birçok inceleme ve ölçüm görevinde, bu düzlem yönlendirmeli strateji çevrimdışı yapılan biraz ek hesaplamayı günlük işletmede kalıcı kazanımlara dönüştürmenin pratik bir yolunu sunar. Aramayı akıllıca döndürülen bir düzleme yönlendirip ardından rotayı düzleştirerek yöntem, robot kollarının titreşimli bir makine yerine daha istikrarlı bir insan eli gibi hareket etmesine yardımcı olur. Sonuç, daha kısa, daha tekrarlanabilir ve donanıma daha nazik bir yol olur; bu da hassas otomatik ölçümleri daha güvenli ve daha verimli kılar.
Atıf: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Anahtar kelimeler: robot kolu yol planlaması, çarpışmadan kaçınma, RRT star algoritması, endüstriyel muayene, robot hareketinin düzeltilmesi