Clear Sky Science · sv
Vägplanering för manipulatorer baserad på det plana restriktionsalgoritmet RRT*
Robotar som hittar fram i trånga utrymmen
Fabriksrobotar delar ofta trånga arbetsytor med skrymmande maskiner, karosser, flygplanspaneler och andra hinder. För att utföra användbart arbete måste en robotarm förflytta sitt verktyg från en punkt till en annan utan att slå i något, samtidigt som rörelsen hålls kort, jämn och pålitlig. Denna studie introducerar en ny planeringsmetod som hjälper robotarmar att följa renare och säkrare banor i trängda tredimensionella miljöer.
Varför vägplanering spelar roll
Modern tillverkning förlitar sig på robotarmar för att mäta och inspektera stora, komplexa komponenter som bilkarosser, fartygsskrov och flygplansskinn. I många av dessa uppgifter förblir arbetsytans utformning densamma från en uppgift till nästa, men armen måste upprepa samma rörelse om och om igen. I det sammanhanget är det mycket mer värdefullt att hitta en utmärkt krockfri bana än att snabbt hitta en bara acceptabel rutt. En kortare, jämnare bana sparar energi, minskar slitage på leder och gör inspektionssystemet snabbare och mer konsekvent över långa tidsperioder.
Den grundläggande idén att styra rörelsen till ett plan
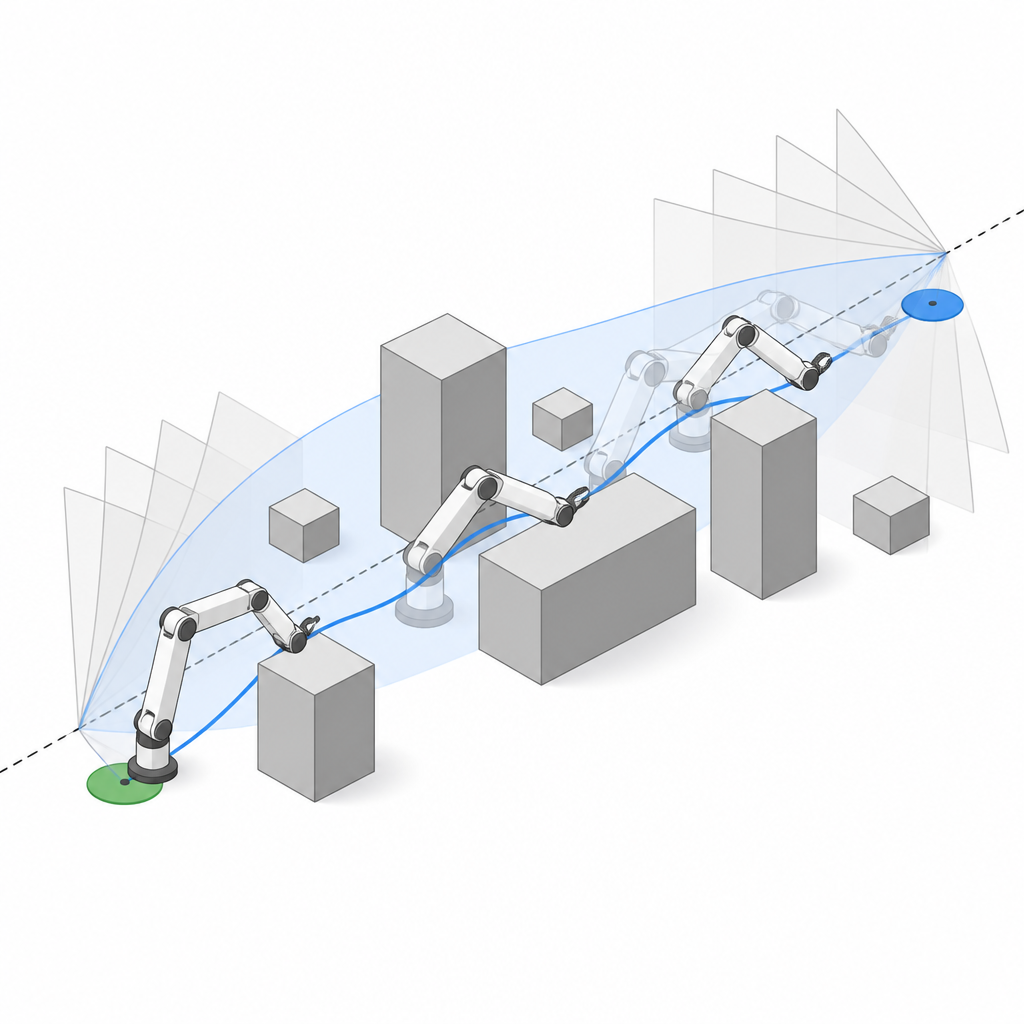
Författarna bygger vidare på en populär samplingmetod kallad rapidly exploring random trees, som vanligtvis sprider provpunkter i hela det tredimensionella rummet tills den stöter på en väg mellan start och mål. Deras nyckelgrepp är att begränsa dessa provpunkter till ett noggrant utvalt plan som passerar genom robotens start- och slutpositioner. Istället för att låta sökningen vandra blint i alla riktningar roterar de detta plan som ett ark runt rät linjen mellan de två punkterna och testar många lika fördelade vinklar. På varje plan planerar de en bana som slingrar sig förbi kända hinder och poängsätter den med en viktad kombination av banlängd, planeringstid och antal böjar i rutten.
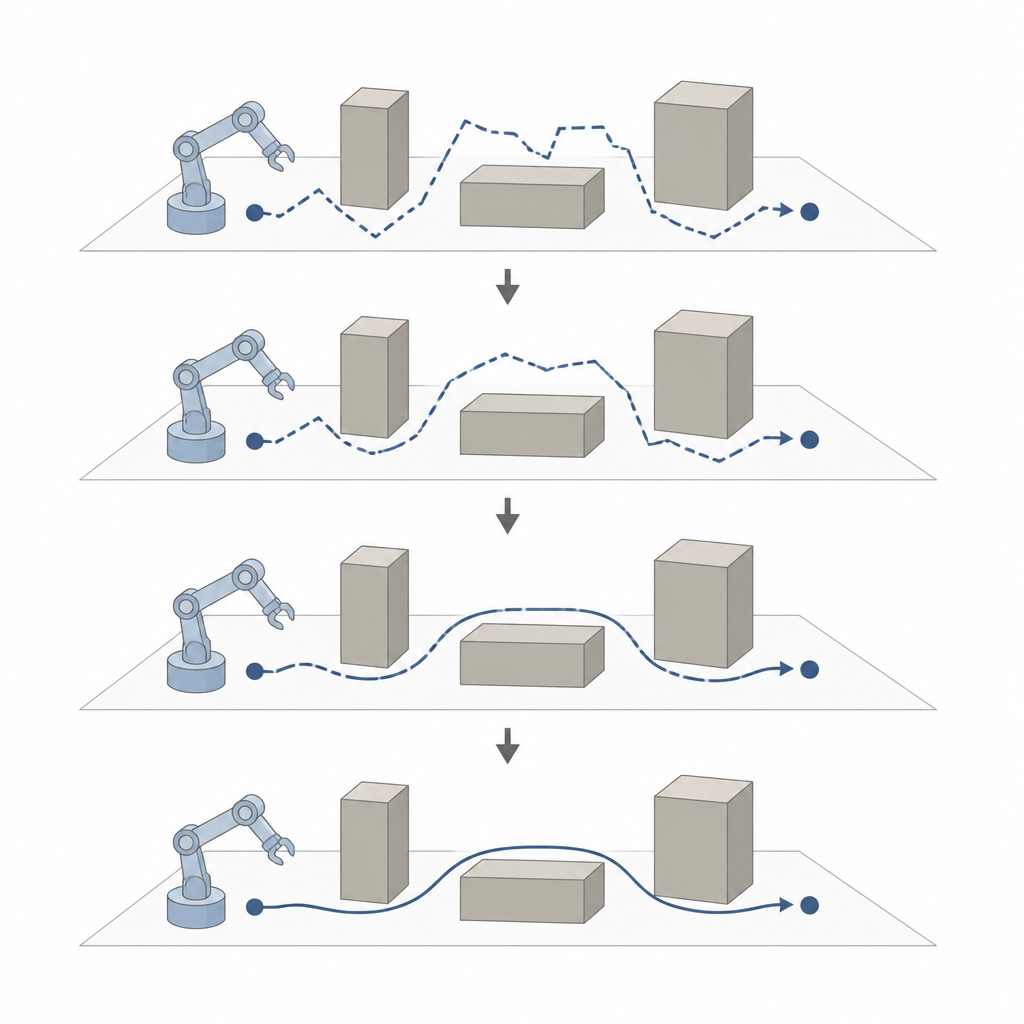
Hur metoden formar och jämnar ut banor
När kandidatbanor samlats in från de olika planen väljer metoden den med lägst totalpoäng och förfinar den. Extra steg omfördelar kopplingarna mellan vägpunkter och beskär avvikande omvägar, så att trädet av möjliga rörelser gradvis kollapsar till en kortare linje. För att undvika skarpa hörn som skulle tvinga robotlederna att rycka eller stanna, passar författarna sedan den valda rutten med en jämn kurva beskriven av ett fjärdegradspolynom. De flyttar också lätt på punkter som går för nära ett hinder innan anpassningen och räknar om saknade djupvärden så att hela banan fortfarande ligger på det valda planet.
Testning i trånga virtuella och verkliga världar
Teamet sätter sin planarrestriktions-RRT* metod på prov i flera simulerade hinderfält och i experiment med en sexledad mätrobot spårad av ett lasersystem. De jämför den med den ursprungliga RRT-metoden, en förbättrad RRT*-version och en populär inlärningsbaserad metod kallad Q learning. I olika hinderlayoutar producerar deras tillvägagångssätt konsekvent rutter som är kortare och använder färre mellanliggande punkter, samtidigt som variationen mellan körningarna är mindre. I en uppsättning försök minskar den genomsnittliga banlängden med mer än en tredjedel jämfört med klassisk RRT och med över fyrtio procent jämfört med Q learning, och antalet vägpunkter halveras ungefär.
När den plana genvägen fungerar och inte fungerar
Idén att vägleda rörelsen på ett plan kan inte lösa varje navigationsproblem. Rörliknande passager eller mycket täta kluster av hinder kan tvinga en robot att slingra sig på sätt som inget enda plant ark kan fånga. För att förutse sådana fall lägger författarna till en snabb kontroll som granskar omgivningen nära start- och slutpunkterna. Om hinder tätt omringar dessa platser inom en viss radie flaggar metoden scenen som osannolik att medge en ren planlösning, vilket tyder på att en mer generell planerare behövs.
Vad detta innebär för riktiga robotarmar
För många inspektions- och mätuppgifter där layouten är fast erbjuder denna planstyrda strategi ett praktiskt sätt att byta en del offline-beräkning mot varaktiga vinster i daglig drift. Genom att styra sökningen till ett intelligent roterat plan och sedan jämna ut rutten hjälper metoden robotarmar att röra sig mer som en stadig mänsklig hand än som en skakig maskin. Resultatet är en bana som är kortare, mer repeterbar och snällare mot hårdvaran, vilket gör precisa automatiserade mätningar säkrare och mer effektiva.
Citering: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Nyckelord: vägplanering för robotarm, krockundvikande, RRT-stjärnalgoritm, industriell inspektion, utjämning av robotrörelser