Clear Sky Science · en
Path planning for manipulators based on the planar constraint RRT* algorithm
Robots finding their way in tight spaces
Factory robots often share cramped workspaces with bulky machines, car bodies, aircraft panels, and other obstacles. To do useful work, a robot arm must move its tool from one point to another without bumping into anything, while keeping the motion short, smooth, and reliable. This study introduces a new planning method that helps robot arms trace cleaner, safer paths in cluttered three-dimensional environments.
Why path planning matters
Modern manufacturing relies on robot arms to measure and inspect large, complex parts such as car shells, ship hulls, and aircraft skins. In many of these jobs the layout of the workspace stays the same from one task to the next, but the arm must repeat the same motion again and again. In that setting, it is far more valuable to discover one excellent collision free path than to find a merely acceptable route very quickly. A shorter, smoother path saves energy, reduces wear on joints, and lets the inspection system run faster and more consistently over long periods.
The basic idea of guiding motion to a plane
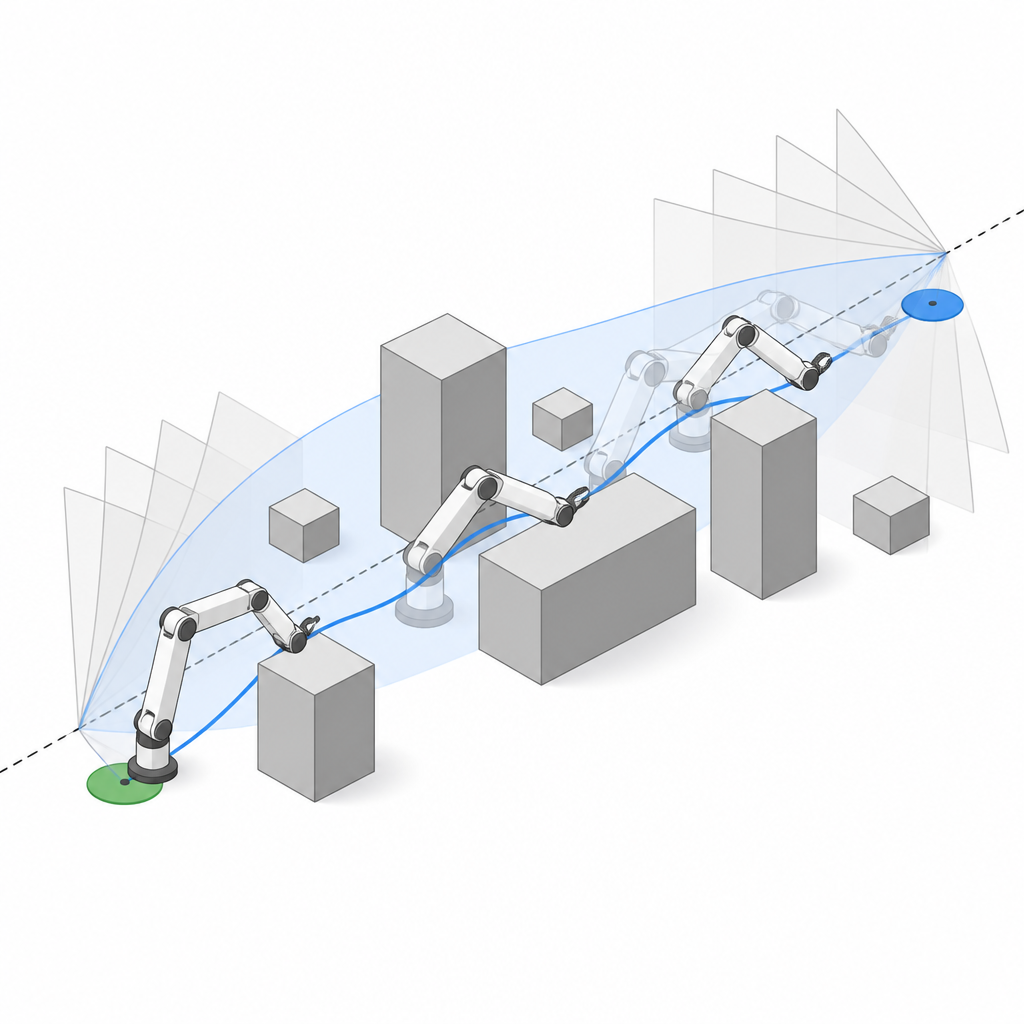
The authors build on a popular sampling approach called rapidly exploring random trees, which usually scatters trial points throughout three dimensional space until it stumbles on a route between start and goal. Their key twist is to confine these trial points to a carefully chosen plane that passes through the start and end positions of the robot. Instead of letting the search wander blindly in all directions, they rotate this plane like a sheet around the straight line between the two points, checking many equally spaced angles. On each plane, they plan a path that skirts the known obstacles and then score it using a weighted mix of path length, planning time, and number of bends in the route.
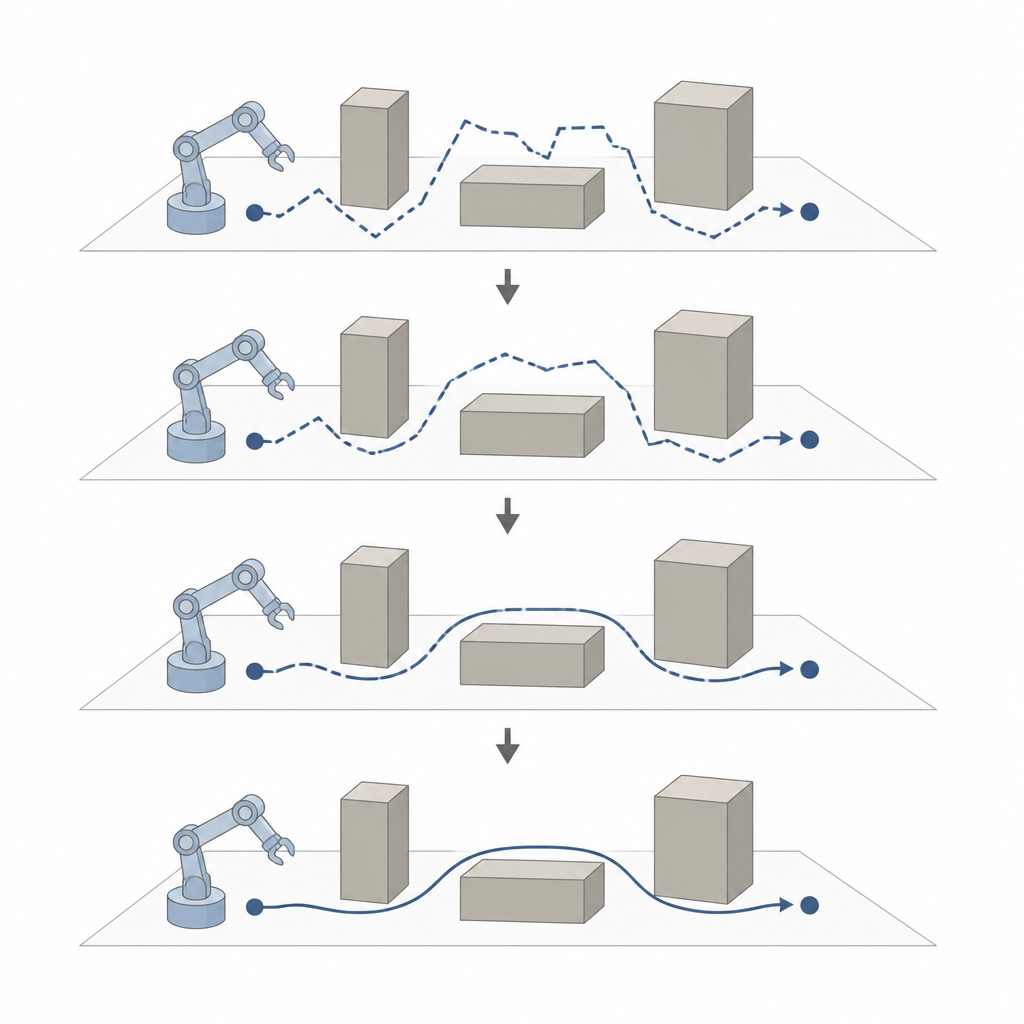
How the method shapes and smooths paths
Once candidate paths are collected from the different planes, the method selects the one with the lowest overall score and refines it. Extra steps reassign the links between waypoints and prune away detours, so that the tree of possible motions gradually collapses onto a shorter line. To avoid sharp corners that would force the robot joints to jolt or stop, the authors then fit the chosen route with a smooth curve described by a fourth degree polynomial. They also nudge any point that passes too close to an obstacle before fitting, and recompute the missing depth values so that the entire path still lies on the chosen plane.
Testing in cluttered virtual and real worlds
The team puts their planar constraint RRT* method to the test in several simulated obstacle fields and in experiments with a six joint measuring robot tracked by a laser system. They compare it with the original RRT method, an improved RRT* version, and a popular learning based method called Q learning. Across different obstacle layouts, their approach consistently produces routes that are shorter and use fewer intermediate points, while also showing less variation from run to run. In one set of trials, average path length drops by more than a third compared with the classic RRT and by over forty percent compared with Q learning, and the number of waypoints is cut roughly in half.
When the planar shortcut will and will not work
The idea of guiding motion on a plane cannot solve every navigation problem. Pipe like passages or very dense clusters of obstacles may force a robot to weave in ways that no single flat sheet can capture. To anticipate such cases, the authors add a quick check that looks at the immediate surroundings of the start and end points. If obstacles tightly encircle these locations within a certain radius, the method flags the scene as unlikely to admit a clean planar solution, suggesting that a more general planner is needed.
What this means for real robot arms
For many inspection and measurement tasks where the layout is fixed, this planar guided strategy offers a practical way to trade a bit of offline computation for lasting gains in daily operation. By steering the search onto an intelligently rotated plane and then smoothing the route, the method helps robot arms move more like a steady human hand than a jittery machine. The result is a path that is shorter, more repeatable, and kinder to the hardware, making precise automated measurements safer and more efficient.
Citation: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Keywords: robot arm path planning, collision avoidance, RRT star algorithm, industrial inspection, robot motion smoothing